WFG120A飞控说明书
WFG120A飞控概述
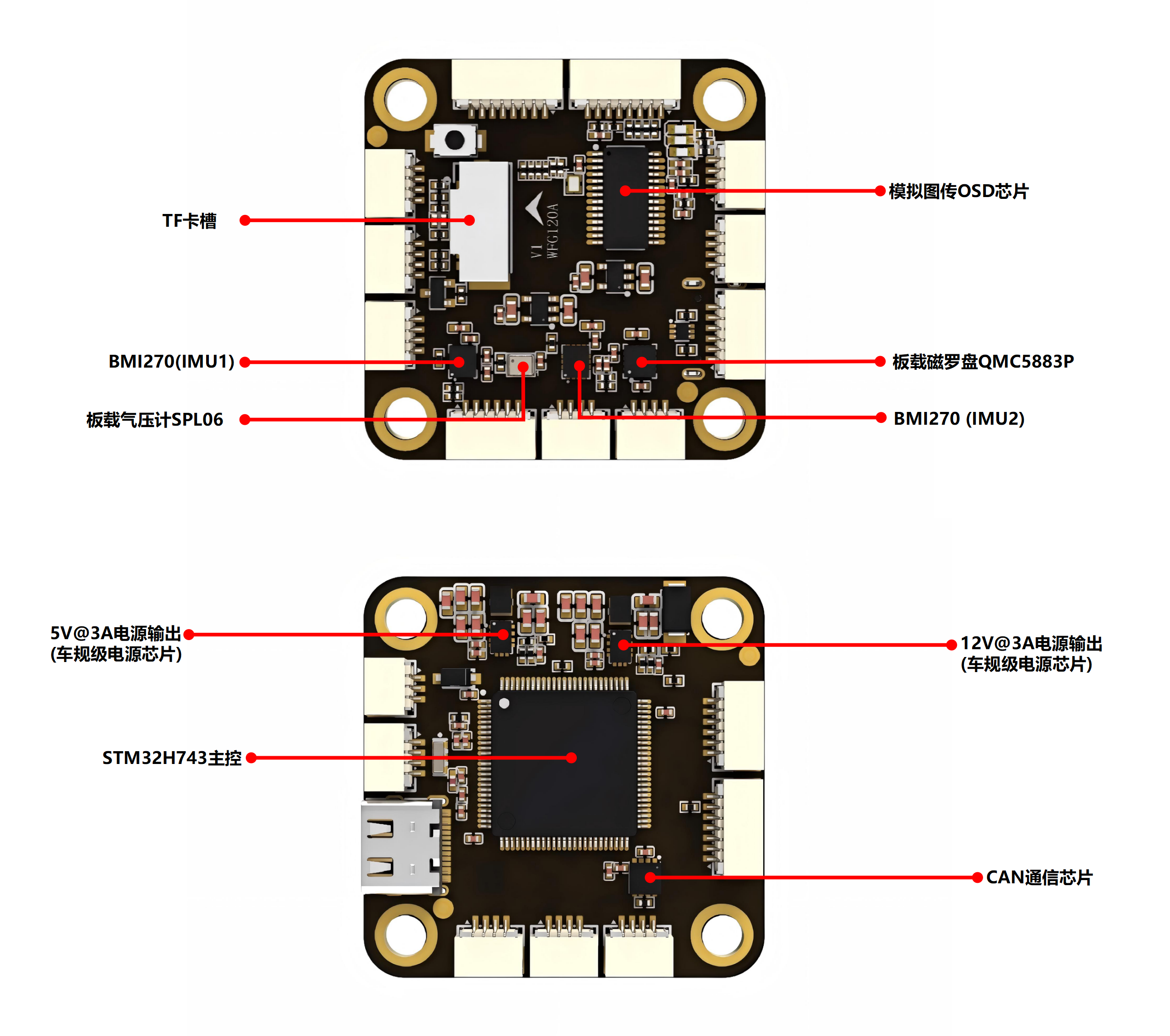
WFG001A飞控是一款高性能飞控,其主控采用STM32H743,主频480Mhz,FLASH为2MB。
采用两颗BMI270工业级IMU传感器冗余设计。
板载SPL06气压计。
板载QMC5883P磁罗盘。
板载2路电源输出,1路为5V3A电源,1路为12V3A电源。(车规级电源芯片)
兼容Ardupilot、PX4、Betaflight、INAV四种开源飞控固件。
提供Ardupilot、PX4、Betaflight、INAV四种飞控固件硬件配置文件,用户可自行修改并编译固件。
硬件规格参数
主控:STM32H743VIT6, 480MHz, 2MB Flash
加速度计与陀螺仪:BMI270 + BMI270 (双工业级IMU)
板载气压计: SPL06
板载磁罗盘: QMC5883P
板载OSD芯片: AT7456E
电调/舵机信号输出通道:共计10路(MOTO1~MOTO10)
4合一电调直插接口:1个(集成电池正极输入BAT、电源GND、MOTO1~MOTO4、电流检测、串口RX)
电调/舵机扩展接口:1个(集成电池正极输入、GND、MOTO5~MOTO10)
预留IO引脚:4个 (PIN_IO1 ~ PIN_IO4)
串口:7个
CAN口:1个
IIC口:1个
模拟摄像头接口:1个
模拟图传接口:1个
高清图传接口:1个(支持大疆O3/O4高清图传直插)
STLINK调试口:支持
蜂鸣器接口:支持
LED灯带接口:支持
数据黑匣子:支持TF卡记录
板载两路BEC输出:5V@3A、12V@3A (车规级电源)
VBAT电源输入范围:3S-8S
物理规格参数
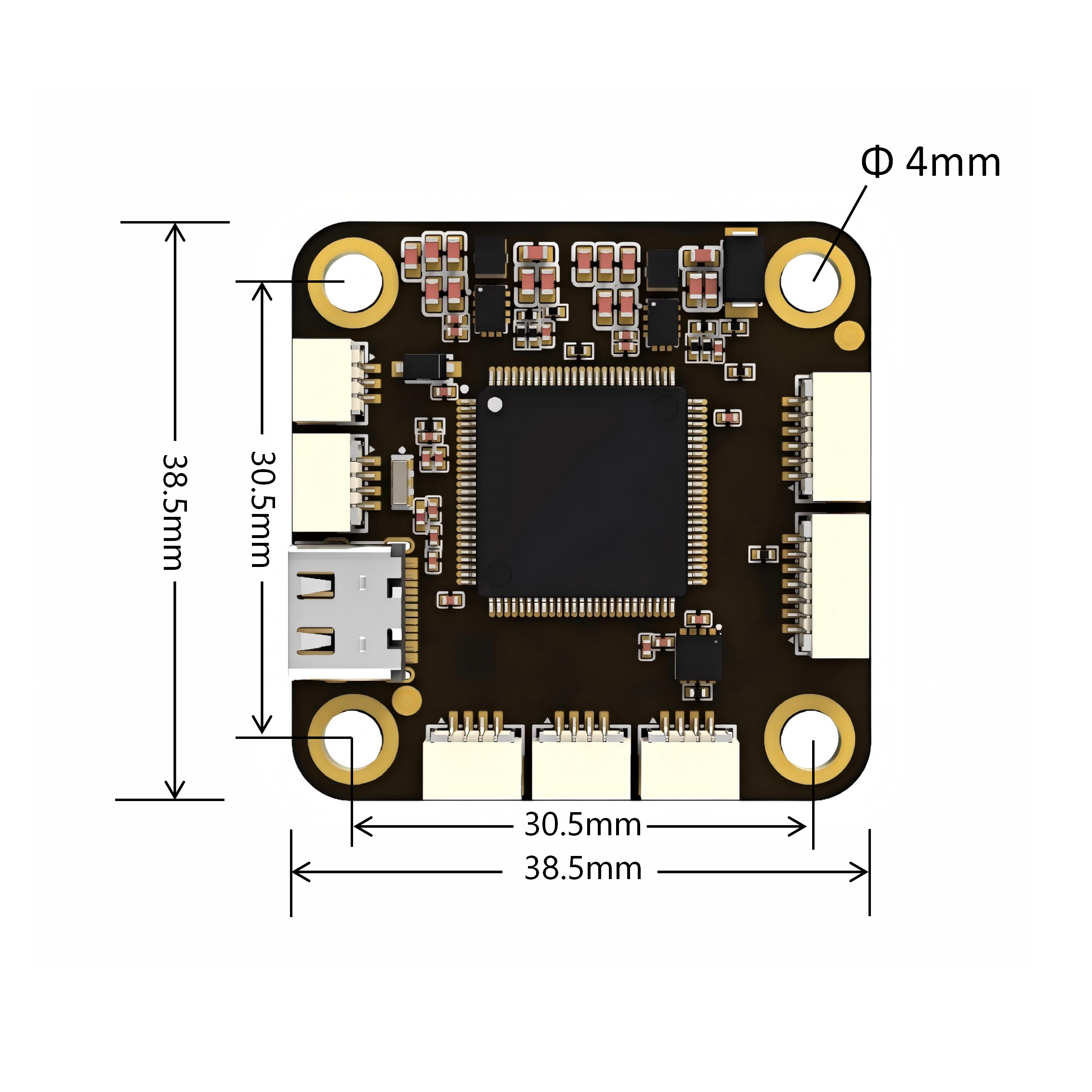
螺丝定位孔间距:30.5 * 30.5mm。
螺丝定位孔直径:4mm。
板卡尺寸:
3D模型文件:
3D_WFG120A.step (39.65 MB)
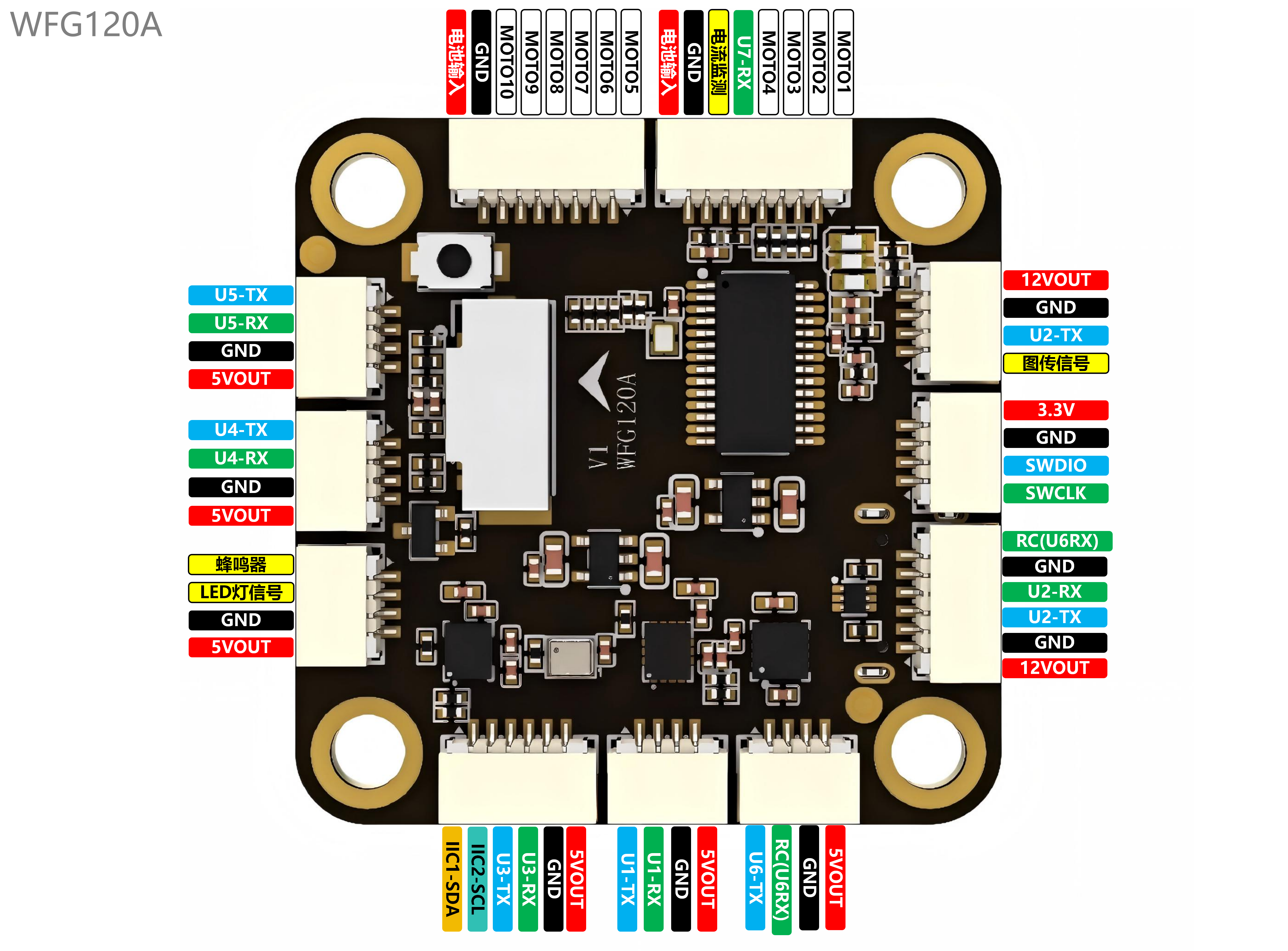
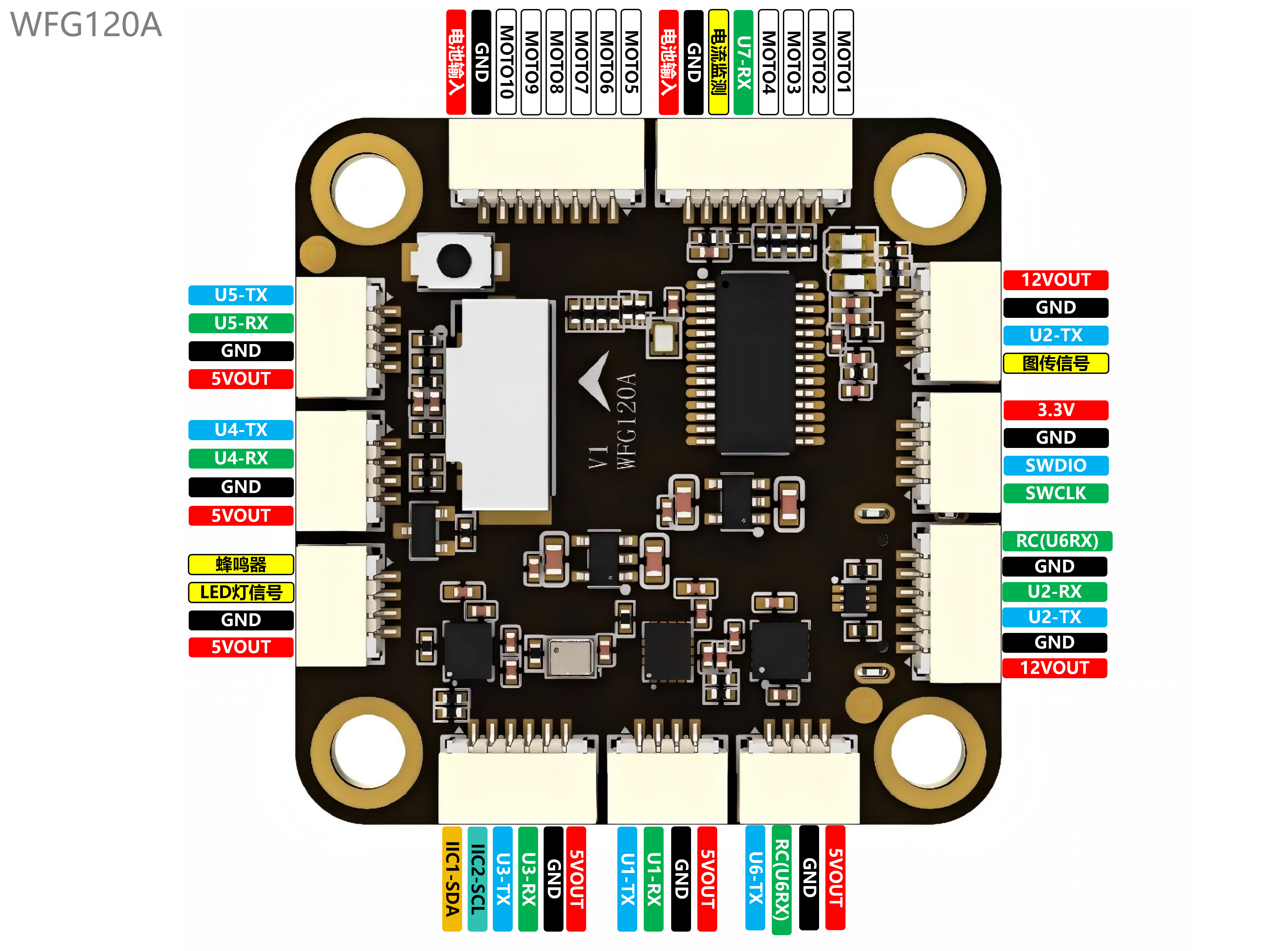
飞控接口定义图
飞控接线示意图
(点击图片可以查看高清大图)
飞控安装方向
AP固件串口映射表(更新中)
PX4固件串口映射表(更新中)
WFG120A烧录固件下载(更新中)
序号 | 固件类型 | 固件 | 备注 |
1 | Ardupilot bootloader | WFG001A飞控,AP固件的bootloader | |
Ardupilot 固件 | 多旋翼4.6.3固件类型汇总: | ||
固定翼4.6.3固件类型汇总: | |||
无人车/船4.6.3固件类型汇总: | |||
2 | Betaflight | 稳定版固件(2025.12.1) | |
最新测试版本固件(编译于2026.3) | |||
3 | PX4 | ||
4 | INAV |
固件烧录说明
飞控出厂已默认烧录AP固件。
如需要更换为其他飞控固件需要自行烧录,具体步骤请查阅文档《飞控固件烧录方法》。
地面站下载
飞控地面站下载 | |||
序号 | 固件类型 | 地面站软件下载链接 | 备注 |
1 | Ardupilot | ||
2 | Betaflight | 从Betaflight2025.12.1的固件开始,不再支持PC版的地面站。 转为使用网页地面站进行调参! | |
3 | PX4-Autopilot | ||
4 | INAV | INAV地面站需要注意与飞控固件之间的匹配。如:9.0.0的地面站就需要使用9.0.0的固件,否则会出现无法连接的情况。 | |
源码下载
WFG120A飞控源码下载 | |||
序号 | 固件类型 | 官方源码地址 | 备注 |
1 | Ardupilot | ||
2 | Betaflight | ||
3 | PX4-Autopilot | ||
4 | INAV | ||
WFG120A硬件配置文件(更新中)
WFG120A飞控硬件配置(自行编译固件时需使用) | |||
序号 | 固件类型 | 配置文件 | 备注 |
1 | Ardupilot | ||
2 | Betaflight | ||
3 | PX4-Autopilot | ||
4 | INAV | ||
飞控源码编译(更新中)
源码编译说明
WFG120A飞控固件编译
通常情况下,用户直接使用物唯科技编译飞控固件即可只有在进行源码二次开发或学习时,用户才需要自行编译飞控源码。
具体飞控源码的编译方法,请查阅文档《飞控固件编译教程》!
推荐编译环境:WSL2子系统、Ubuntu22.04
注意:编译WFG120A飞控固件前,请确保已将飞控的硬件配置文件,放置在飞控源码的指定的文件夹中!
编译AP固件命令
编译BF固件命令
编译PX4固件命令
编译INAV固件命令