如何购买?
WFG100资料汇总
https://www.wwzhyun.cn/docs?node=wfg100-764e6b5505
硬件版本

概述
- 面向的无人机控制系统科研推出的一款开源飞控,软硬件设计资料全部开源。
- 板载集成双路IMU传感器、磁罗盘传感器、气压计、模拟OSD模块。
- IMU已适配ICM42688P、ICM42605、BMI270、国产型号等多种。
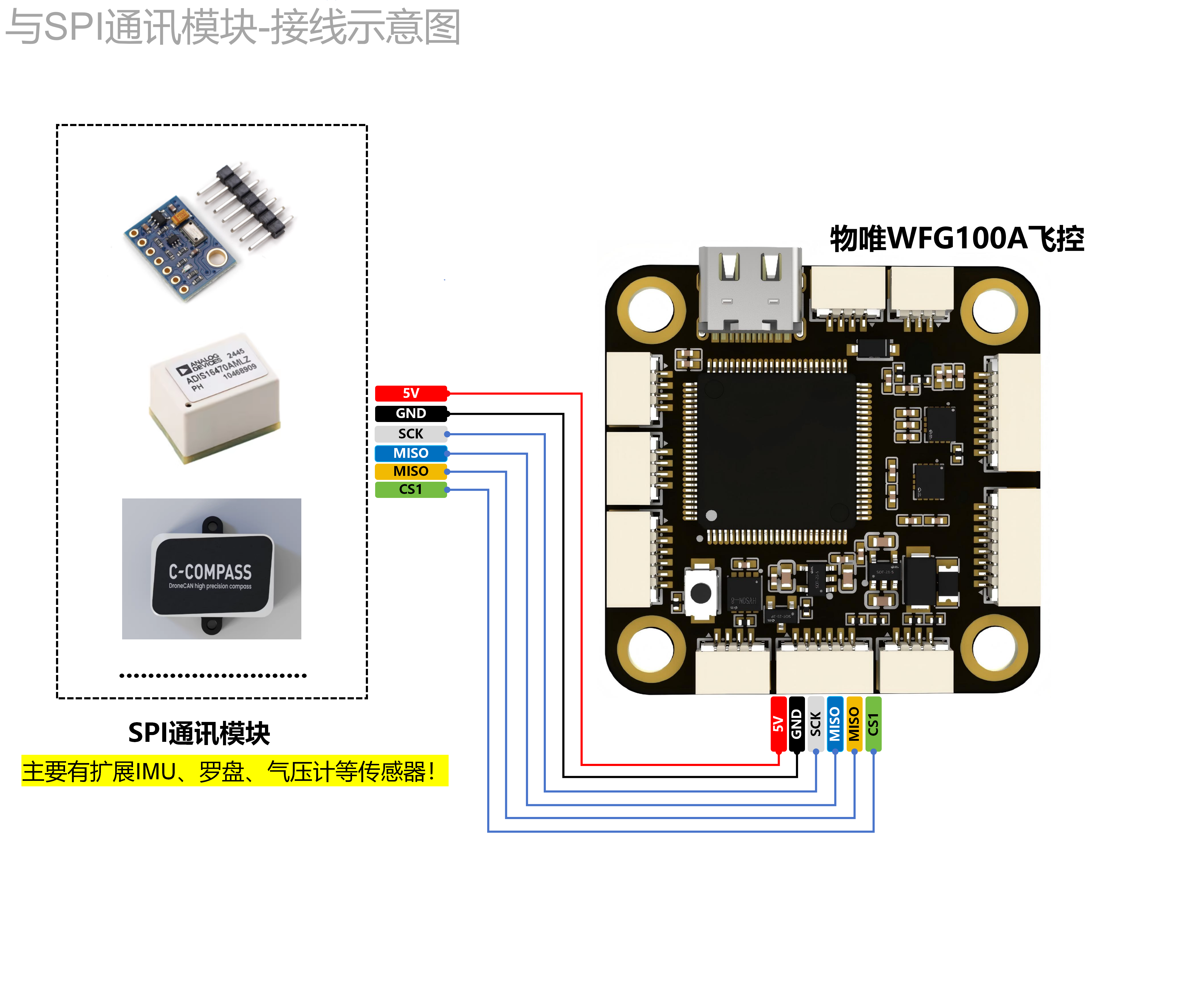
- 预留SPI接口,支持添加高精度SPI协议的气压计/IMU/磁罗盘等外设传感器。
- 兼容 ArduPilot / PX4 / Betaflight / INAV四种固件,提供引脚配置文件。
- 丰富的外设接口,为用户提供强大的扩展能力及二次开发潜力。
- 板载板载两路BEC输出:5V@3A、10V@3A ;支持3S-6S的电池输入供电。
- 30.5mm X 30.5mm安装孔位,具备SH1.0外设端子接口的同时,保留焊盘的连接方式。
规格与特性
- 主控:STM32H743VIT6, 480MHz, 2MB Flash
- 加速度计与陀螺仪:双IMU冗余设计,支持多种型号组合,量大支持定制
- 板载气压计: SPL06
- 板载磁罗盘: QMC5883P
- 板载OSD芯片: AT7456E
- 电调/舵机信号输出通道:共计10路(S1-S10,其中S1-S8支持双向Dshot通讯)
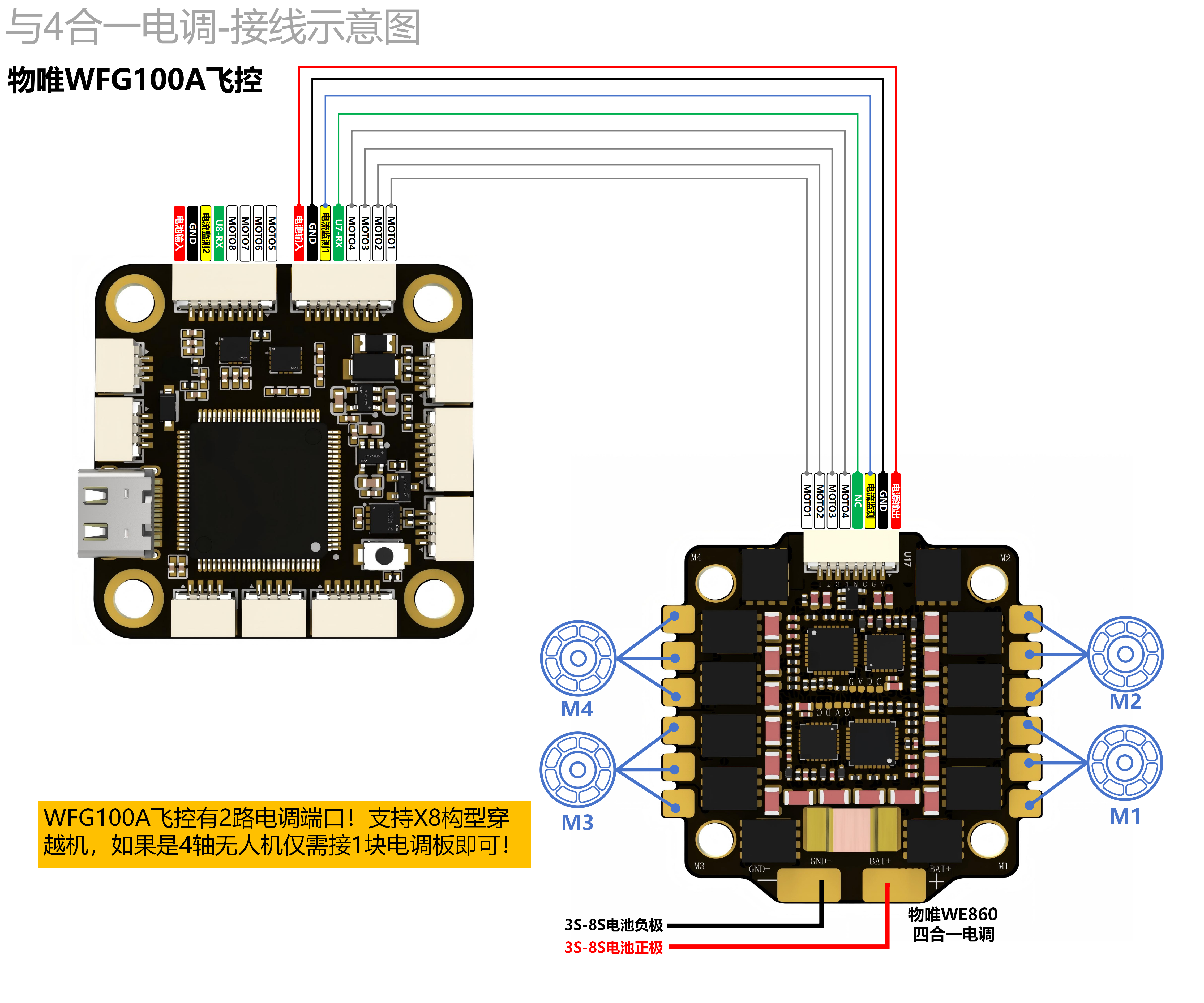
- 电调直插接口1:1个(集成电池正极输入BAT、电源GND、MOTO1~MOTO4、电流检测、串口RX)
- 电调直插接口2:1个(集成电池正极输入BAT、电源GND、MOTO5~MOTO8、电流检测、串口RX)
- 预留IO引脚:4个 (PIN_IO1 ~ PIN_IO4)
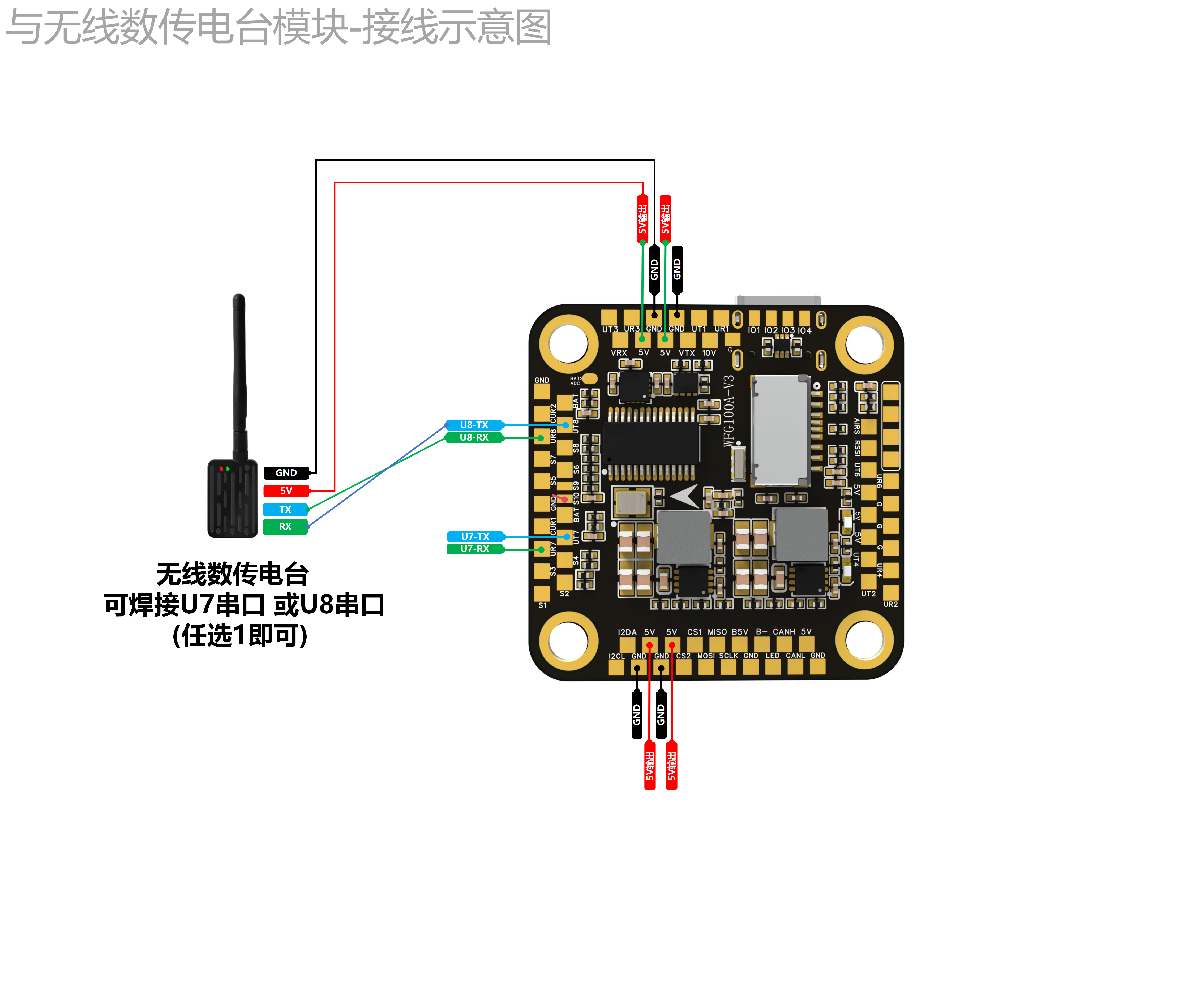
- 串口:7个
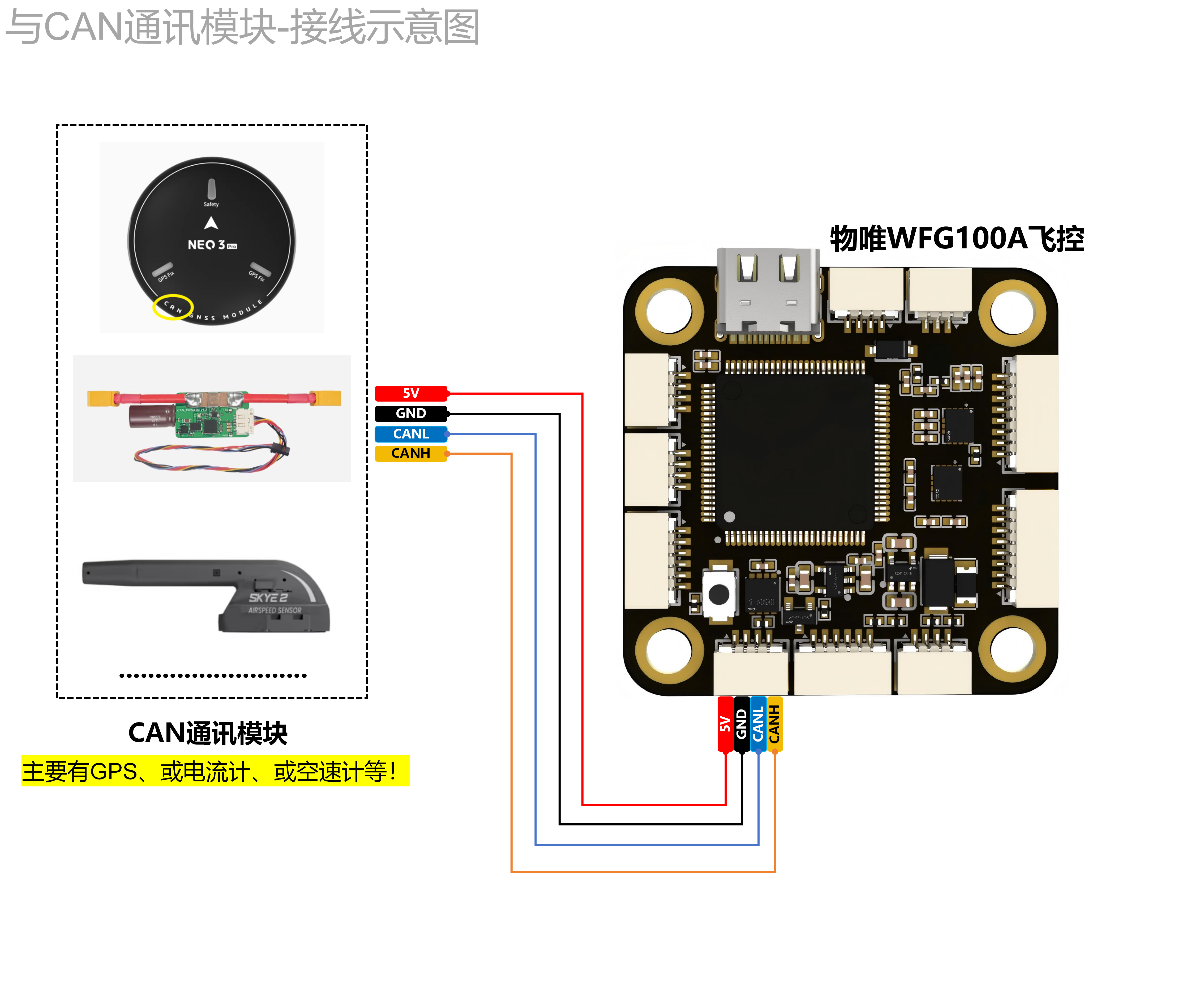
- CAN口:1个
- IIC口:1个
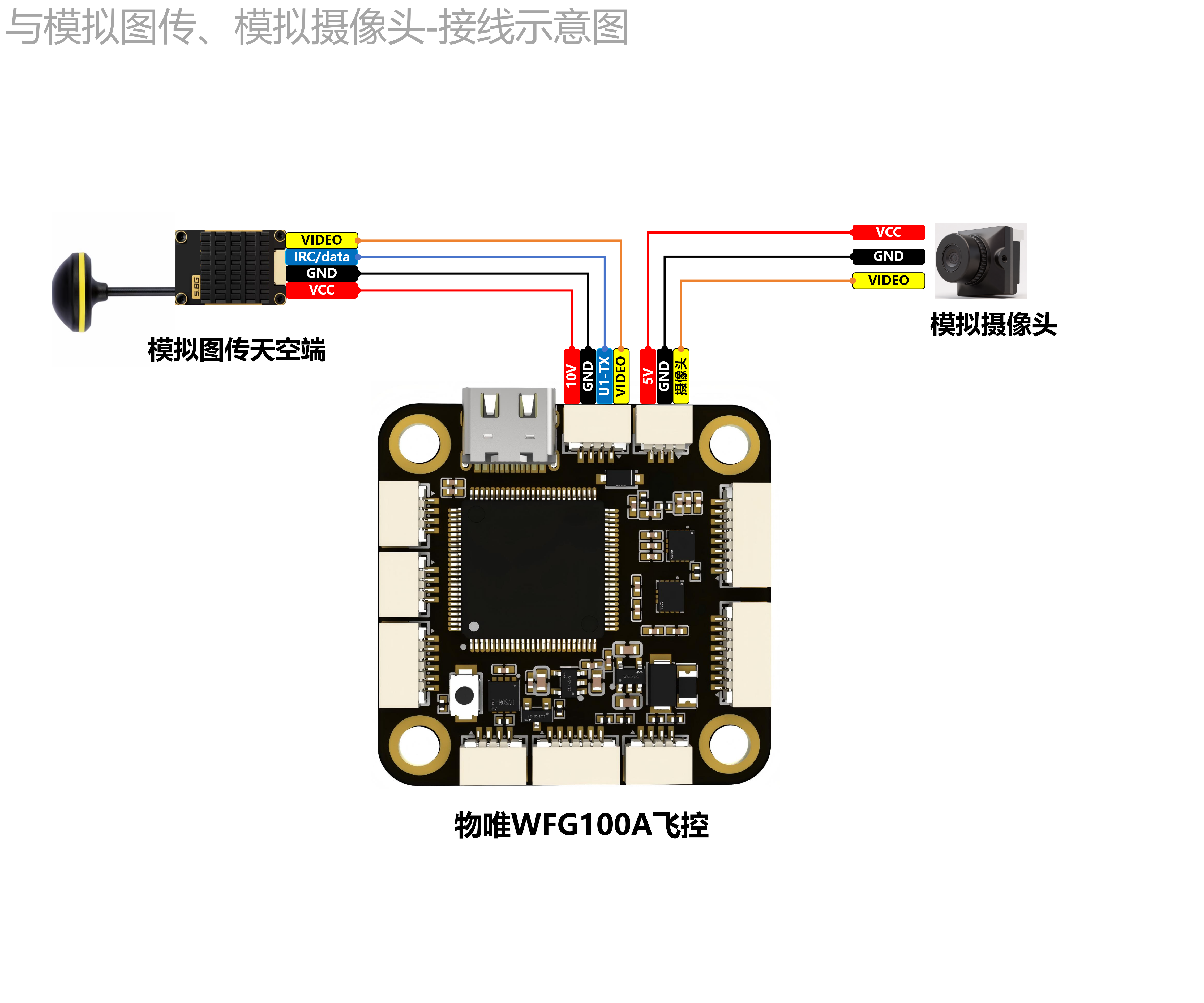
- 模拟摄像头接口:1个
- 模拟图传接口:1个
- 高清图传接口:1个(支持大疆O3/O4高清图传直插)
- STLINK调试口:背面引出焊点
- 蜂鸣器接口:背面引出焊点
- LED灯带接口:背面引出焊点
- 数据黑匣子记录方式:TF卡
适用场景
- 软硬件开源学习平台:完整设计资料开放,适合飞控原理学习、二次开发与源码研究。
- 科研教学实验验证:面向院校科研、教学实验与无人机原型机快速迭代验证。
- DIY爱好者定制开发:支持灵活硬件修改与传感器扩展,满足个性化无人机组装与调试需求。
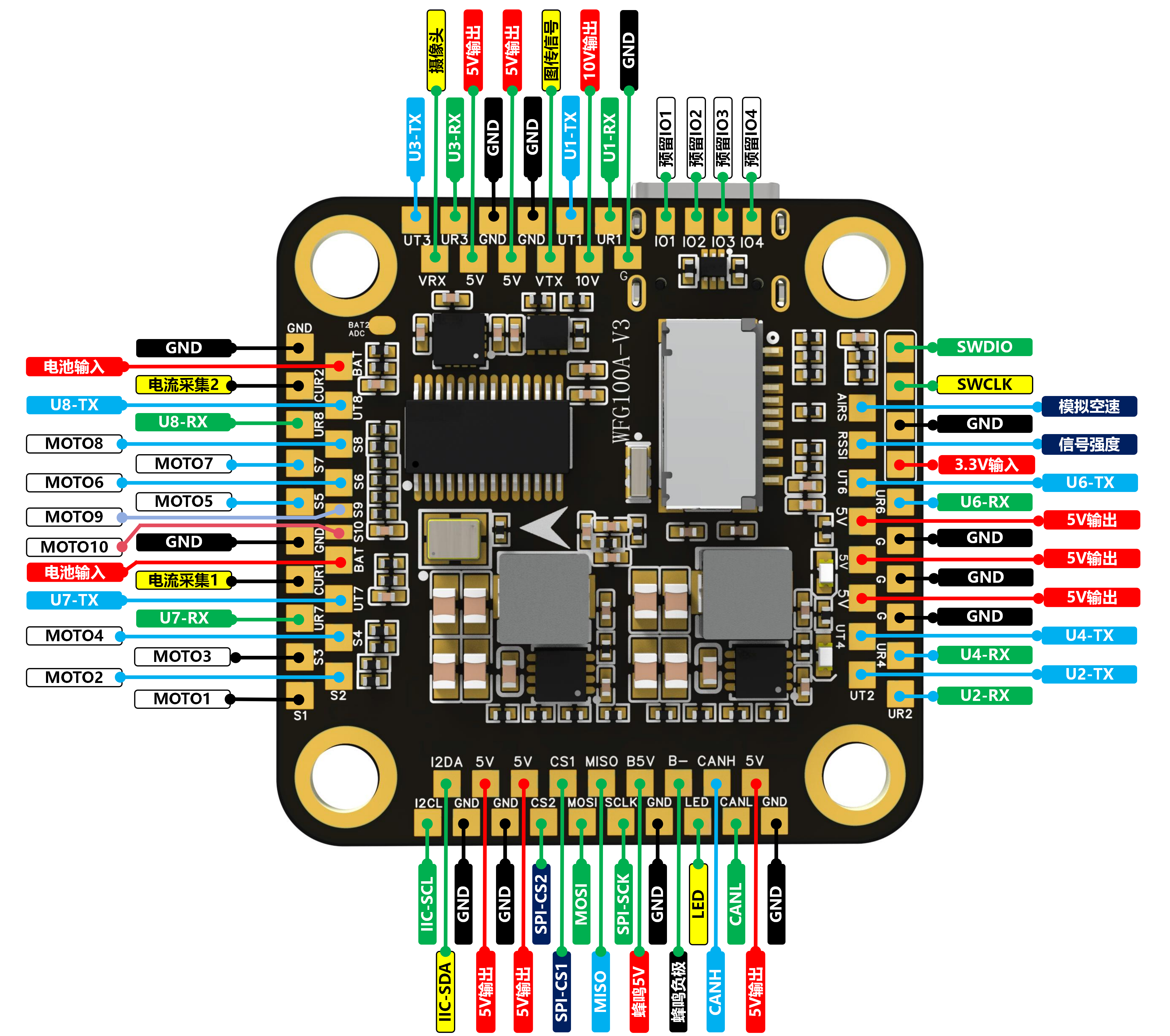
正反面接口、焊盘定义
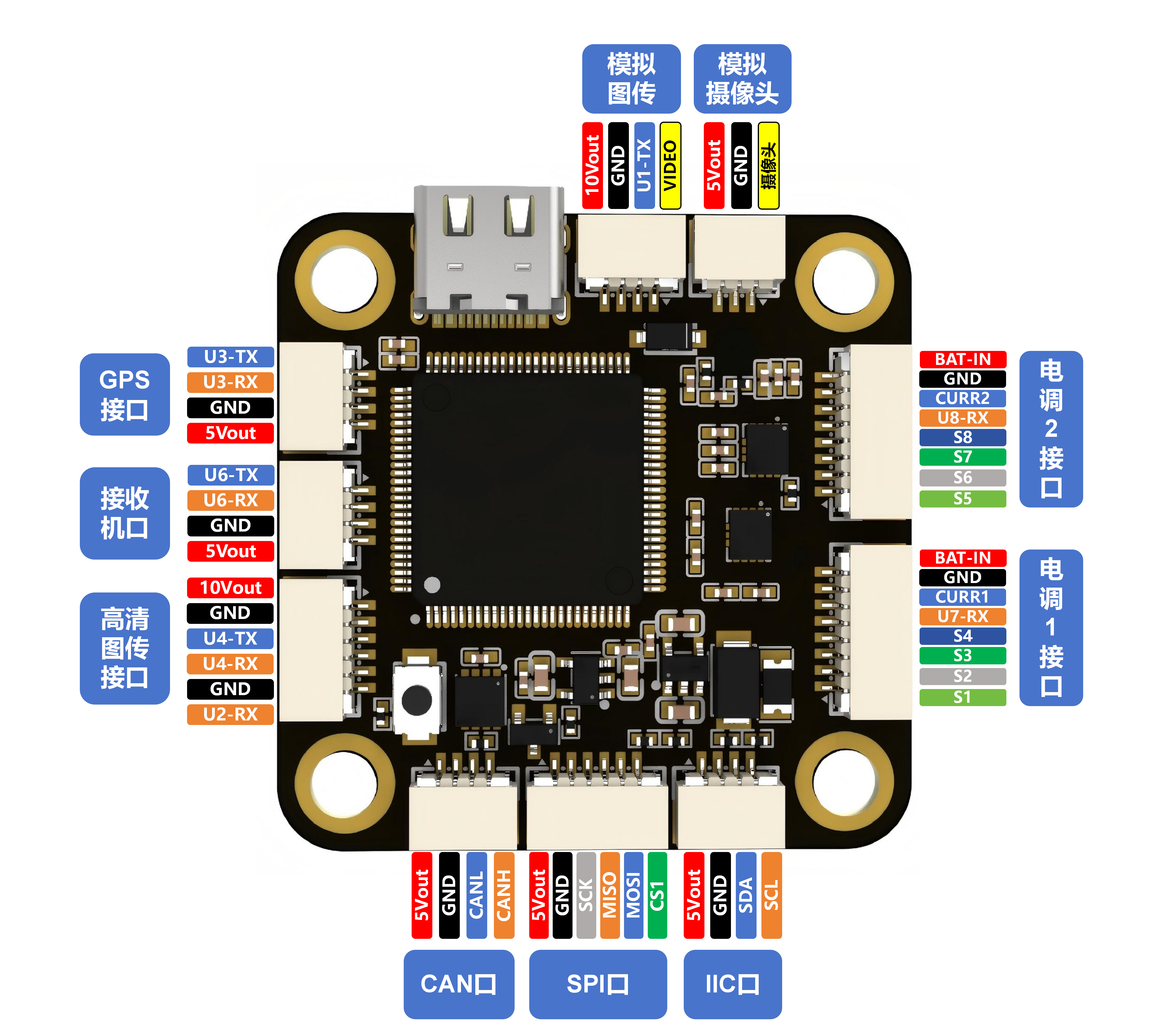
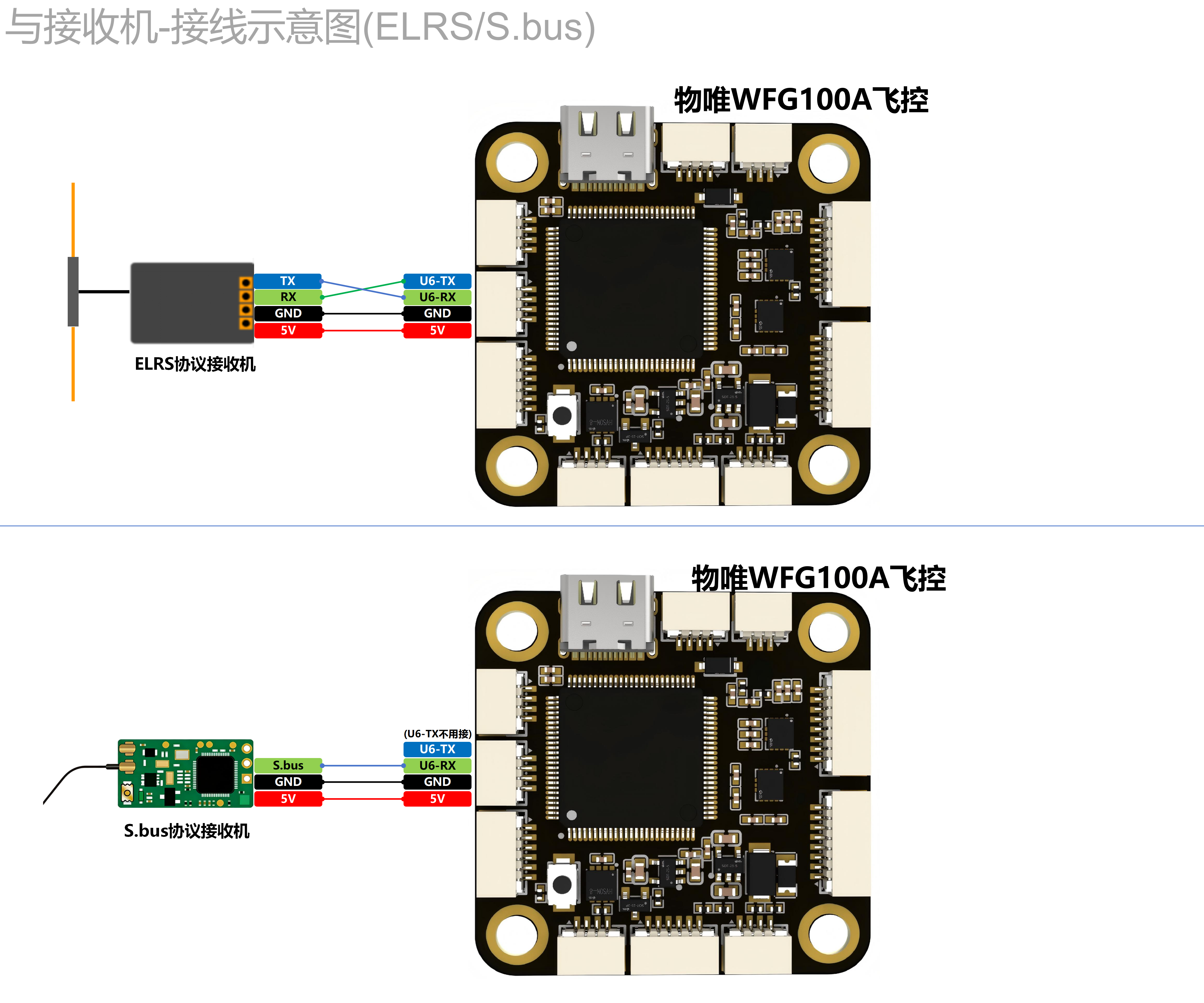
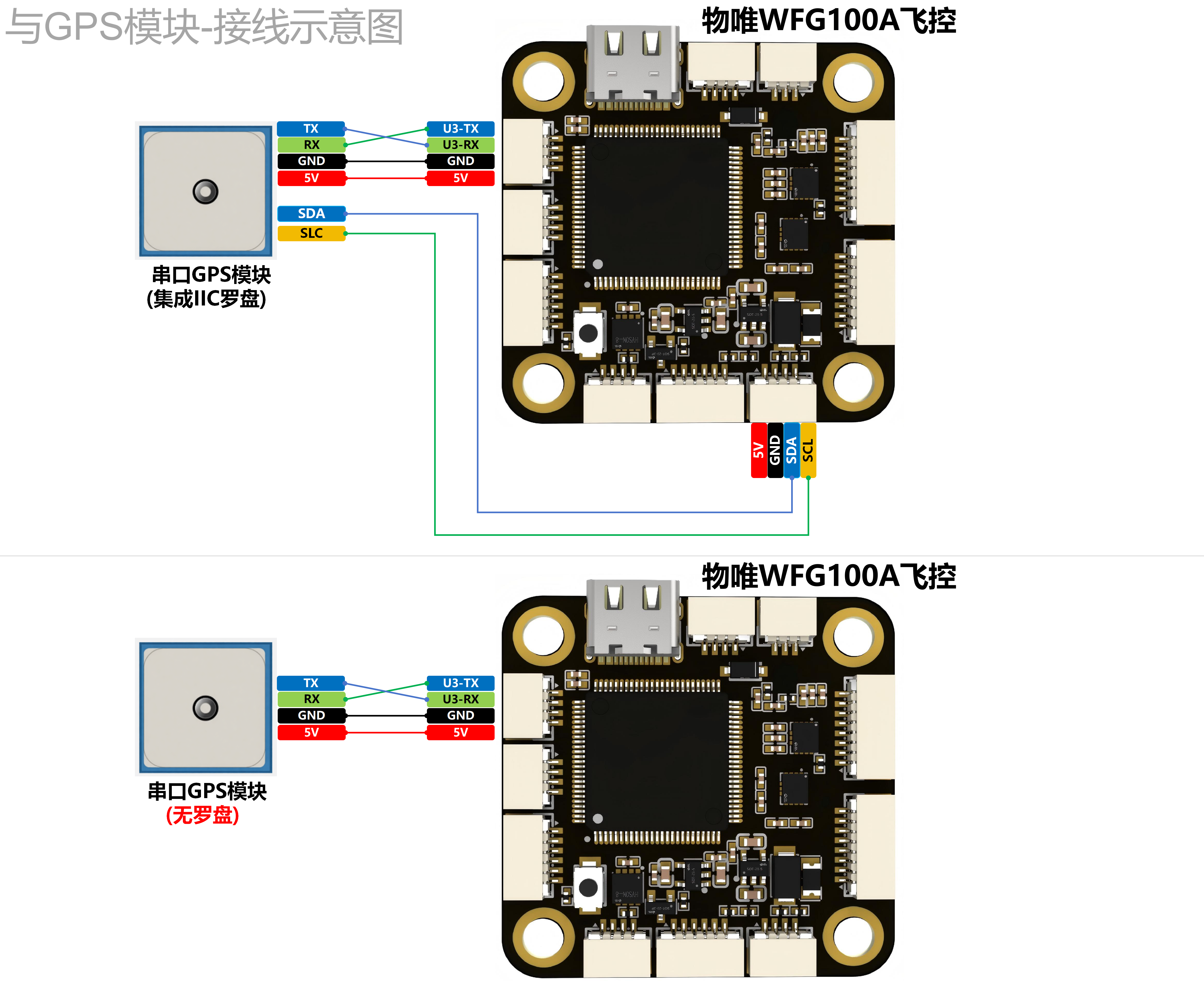
外设接线示意图