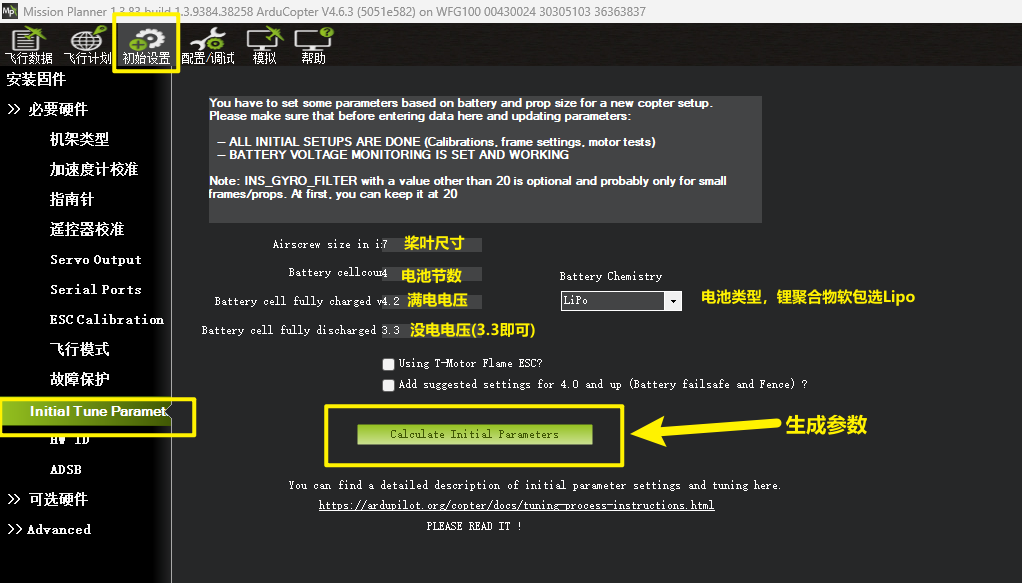
2、根据桨叶与电池电压生成初始PID参数
MP地面站可根据用户的无人机配置,生成一些初始化的系统参数值! 1)在初始设置->Initial Tune Parameters 界面,配置对应的参数,如下图所示。 然后点击生成参数。 2)生成参数,不勾选batt开头的参数,其余都勾...
MP地面站可根据用户的无人机配置,生成一些初始化的系统参数值!
1)在初始设置->Initial Tune Parameters 界面,配置对应的参数,如下图所示。
然后点击生成参数。
2)生成参数,不勾选batt开头的参数,其余都勾选上,
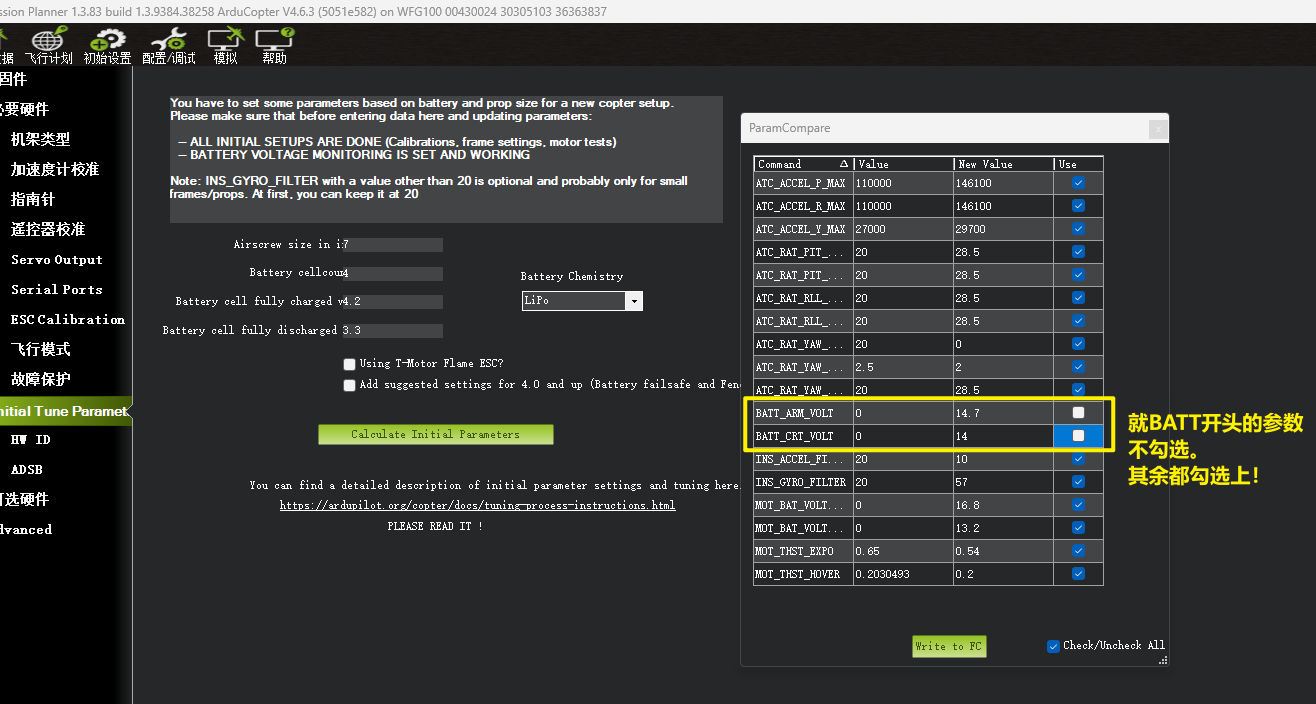
然后点击Write to FC写入参数!
然后点击OK即可!