6、PID + 滤波器高级调参(待更新~~)
前言:
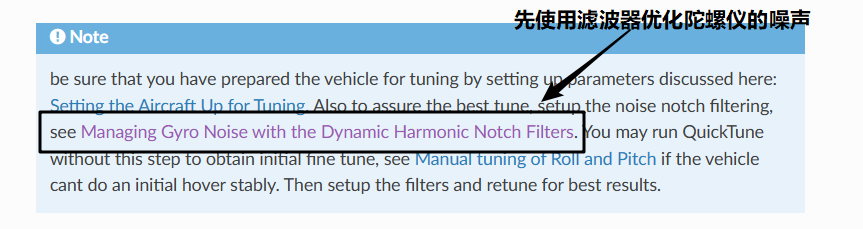
在APM的官方wiki中,其实是建议大家在使用脚本快速调参之前,先对组装好的飞机进行滤波器调参,如下图所示:
就一般的应用场景(遥控器飞行、自动航点飞行)而言,其实使用滤波器的默认参数的也没啥问题。
在一些高机动、高过载的应用场景下使用时,调好滤波器的参数会有非常大的性能提升!(如用AP固件飞穿越机、或者用来做高速追踪的应用)
由于滤波器的调参步骤比较复杂,需要配置的参数很多,如果没有调好,反而适得其反!
所以,我反而将滤波器的调参先放到后面,先用快速调参让飞机先平稳起飞,建立信心,然后再深入研究低通滤波器的使用!
写的比较简单,单靠官方wiki文档,估计大家都摸不着头脑!