7、自稳模式-相关参数调试
自稳模式概述: 飞手用roll与pitch操作控制飞行器的倾斜角度。 当飞手松开roll与pitch摇杆时,飞行器将会自动水平,但是不具备定高和定点的效果! 在有风的环境中,飞手需要不断的修正roll与pitch,从而以让无人机定点停留。 ...
1、自稳模式概述
- 飞手用roll与pitch操作控制飞行器的倾斜角度。 当飞手松开roll与pitch摇杆时,飞行器将会自动水平,但是不具备定高和定点的效果!
- 在有风的环境中,飞手需要不断的修正roll与pitch,从而以让无人机定点停留。
- 飞手的油门输入控制马达的平均转速,这意味着这如果想保持高度,需要不断的修正油门。
- 飞手用yaw操作控制转向速率。当飞手松开yaw摇杆时,飞行器将会保持它的朝向不变。
- 警告:在进行其他模式的飞行之前,熟练掌握自稳模式下的飞行是必不可少的,强烈建议飞手在出现突发情况时能够迅速切回自稳模式以避免事故。
2、自稳模式(Stabilize)调参说明(角速率环、角度环)
自稳模式主要是姿态控制器在控制,姿态控制器又由内环角速率环和外环角度环所组成。
外环角度环的输入来自于遥控器的摇杆指令,外环角度环的输出是期望角度。
内环角速率环的输入来自姿态控制器外环的输出(期望姿态角),内环角速率环的输出便到电机PWM输出。
因此自稳PID的调试原则是:先内环,再外环。即先调好角速率环参数,再调角度环参数。

3、自稳角度限制参数
ANGLE_MAX,控制自稳模式下的最大倾斜角度,默认为 3000(即 30 度)
如果姿态角度限小了,无人机机动性能会变差,打满杆也飞不快!
但是也不建议姿态角限制开太大,否则无人机会变得非常灵敏!
4、自稳模式-角速率环
- 官方建议:优先使用进行《lua脚本角速率快速调参》进行PD项调参,如果自动调参不够好,再尝试用手动调试PID参数!
- 在手动调参之前请确保
ATC_THR_MIX_MAN参数和MOT_THST_HOVER参数;具体什么含义请查阅文档《几个跟油门控制相关的参数》 - 默认的 PID参数,可以让F450四轴能够平稳起飞,但需要进行细微调整。
- 如果是5寸穿越机或7寸穿越机,默认的PID参数有可能是超调的,具体可查阅文档《5寸/7寸穿越机的通用的PID参数》
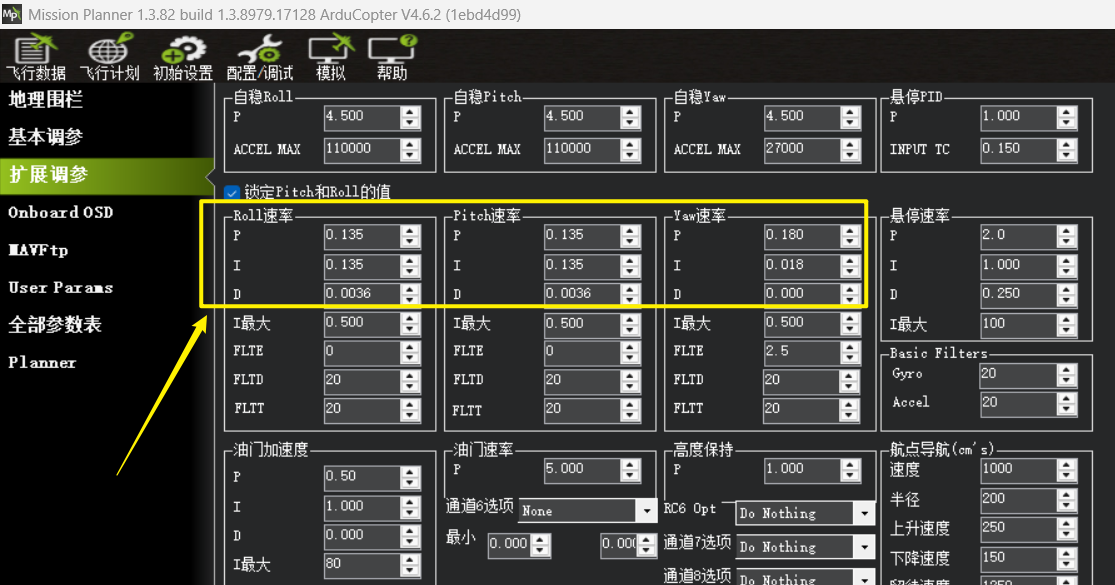
5、自稳模式PD项调试说明
- 如果无人机的已经在某个轴上出现了振荡,则首先以 30% 的幅度降低 P、D ,直到稳定,然后再开始手动调整。
- 假如都无上述问题,那么就可以依照下列步骤对角速率换控制器进行调参(先调节横滚和俯仰,再调节偏航):