10、自动调参-AutoTune模式
前言、AP固件自动调参官方英文wiki地址 autotune.html 由于AP固件的PID参数众多,所以又自动调参的模式,也就是 AutoTune模式 。 自动调试仿真效果(MP地面站+RF9.5模拟器) 一、自动调参会调节的参数 自动调...
前言、AP固件自动调参官方英文wiki地址
由于AP固件的PID参数众多,所以又自动调参的模式,也就是AutoTune模式。

自动调试仿真效果(MP地面站+RF9.5模拟器)
一、自动调参会调节的参数
自动调参会调节两个环:姿态外环(角度环)、姿态内环(角速率环),如果对所有轴进行自动调参,会调以下参数:
二、自动调参建议:
- 自动调参请选择一个空旷的场地,且在无风/微风环境下进行!
- 请设置好MOT_THST_EXPO参数,这个参数是设置桨叶和电池后自动生成。《根据桨叶尺寸和电池电压生成相应的基础感度参数》
通常5~7寸穿越机在0.5~0.6之间,8~10寸航拍机在0.65左,20寸以上的大载重机在0.75~0.8
- 请设置好MOT_SPIN_MIN参数(解锁后油门拉到最低的转速),不能设置于过低,通常在0.15~0.2比较合适!
- 无人机首先能够在自稳模式下基本保持水平,有点抖动或者晃动没有关系!假如姿态水平都无法保持,飞起来后都出现剧烈的摇摇晃晃的情况,飞控是无法进行自动调参的!
如果无人机连基本水平都无法保持,可先查看以下3篇文档进行基本的调参:
- 确保机体的刚性强度足够,不要飞起来软绵绵的产生共振。
- 请确保螺旋桨或电机搭配正常,没有出现过载情况。
- 飞控安装时,最好做了减震处理!
三、自动调参前,需要设置的参数:
- 自动调参之前先做好参数保存与备份,将无人机当前的参数保存到某处位置。

- 使用参数AUTOTUNE_AXES,来选择自动调参哪个轴,默认=7,调试所有轴,建议一次只勾选1个轴,否则1块电池可能调不完。

- 使用参数AUTOTUNE_AGGR,选择自动调参的激进程度,默认=0.075(中等),0.1(激进),=0.05(较弱)
较高的值会使调出来的参数能够更好地抑制外部干扰(更抗风),但可能会过冲!
AUTOTUNE_AGGR =0.075适用于90%的飞机!

- 自动调参的原理是飞控准备一堆参数去试响应,如果发现不够或超调了,就增加或降低百分比再试。
参数AUTOTUNE_GMBK就是这个增加或降低的百分比,默认是25%!

- 对于螺旋桨大于13英寸的无人机,请将横滚和俯仰速率滤波器设置为 10Hz,这些参数如下(它们默认是 =20):
ATC_RAT_RLL_FLTT = 10
ATC_RAT_RLL_FLTD = 10
ATC_RAT_PIT_FLTT = 10
ATC_RAT_PIT_FLTD = 10
- 开启PID增益的电池电压缩放功能。
启用此功能后,随着电池电量下降,横滚、俯仰和偏航控制增益将会增加,以补偿电压下降。这有助于确保无人机的姿态控制性能,不会随着电池电压的降低而降低。
要启用此功能,请将MOT_BAT_VOLT_MAX设置为电池的满电电压(例如,3S 电池为 12.6V)。增益将进行调整,以尽量保持满电状态下的姿态控制响应。
将MOT_BAT_VOLT_MIN设置为无人机正常情况下电池的最低电压,当电压低于此值时,增益将不再增加,通常将它设置为跟电池的一级低电压保护参数BATT_LOW_VOLT一致!
四、自动调参关键步骤:
1)找一个足够开阔的场地,且在无风环境下进行!
2)在遥控器上,将一个Aux辅助通道开关设置为AutoTune模式,
本文AUX通道,以遥控器的RC7通道为例(具体用哪个通道,用户可根据自己的实际情况选择),作为AutoTune调参通道,如下图所示!

3)当RC通道7处于PWM高位时,开启自动调参; 当RC通道7处PWM低位时,关闭自动调参。


4)开启自动调参之前,无人机必须以定高模式飞在空中合适的高度,此时油门杆保持归中。
然后将遥控器的RC通道7从低位打到高位,无人机将进入AutoTune自动调参模式!

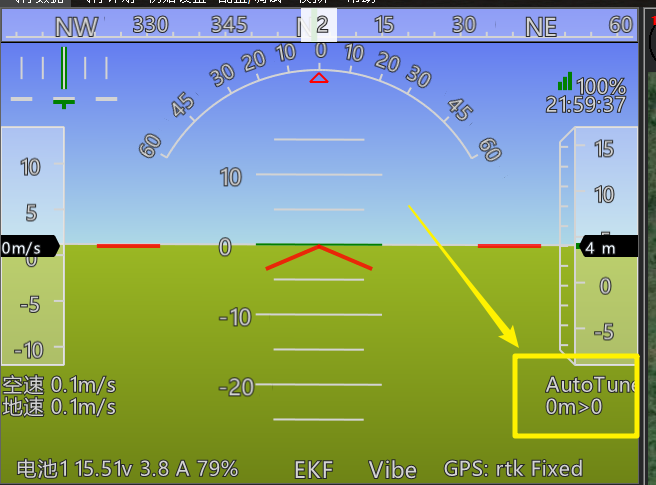
5)在AutoTune自动调参模式下,必须所有的摇杆(包括油门通道)处于回中状态,才会开启自动调参。
否则会提示飞行员手动接入,暂停自动调参,如下图所示:

注:由于自动调参是在定高模式下进行的,定高模式不会定点,所以在调参过程中,可能会飘远,飘远了以后,就手动打杆把它拉回来。一旦飞控检测到摇杆没有在居中状态,就会就会暂停调参,等所有摇杆都回中了以后,又会重新恢复自动调参,继续一抽一抽的晃动。
6)进入自动调参后,飞机会开始一抽一抽的摆动,同时在消息页面可以看到以下参数。

7)进入自动调参后,从地面站消息中可以看到依旧尝试调试的参数分别是:
先调所选轴的角速率D、
再调所选轴的角速率P、

最后调所选轴的姿态角外环P

五、自动调参调参结束的标记
当前自动调参结束后,无人机会姿态恢复水平,停止来回抽动,并且地面站的消息会打印AutoTune:Success
如下图显示:

注意:自动调参完成后,无人机不会装载新的PID参数,而将恢复到最开始的的PID参数!
六、如何保存/放弃,自动调参后的参数?
由于自动调参完成后,无人机在空中,不会立即装载新的PID参数,而将恢复到最开始的的PID参数!
因此需要将RC通道7先从高位打到低位,然后再从低位打回高位。此时新的PID参数将会被装载到飞控上,就可以进行打杆测试新参数!
如果再将RC通道7又打回去低位,这个时候旧的PID参数就会被重新装载到飞控上,可以再次对比新旧参数!
- 保存新参数:经过上述操作后,将RC通道7置高位,然后在AutoTune模式下进行降落并上锁,新的参数就会被保存!
地面站的消息中会提示:AutoTune: Saved gains for Roll

- 放弃新参数:调参完成后,将RC通道7置低位,以非AutoTune模式下进行降落并上锁,新的PID参数就会被放弃,继续使用旧PID参数!
地面站会提示: AutoTune: Stopped

七、打开调试曲线,查看俯仰角跟随效果!
步骤1:勾选调试,打开调试窗口

步骤2:鼠标双击调试窗口,按需查看俯仰轴的跟随效果pithch和nav_pitch,或横滚轴的跟随效果roll和nav_roll


步骤3:查看跟随曲线

八、自动调参的相关补充
- 自动调谐功能会尝试将每个轴的参数调整到飞机能够承受的极限。在某些飞机上,这可能会导致响应过于灵敏。以下是适用于大多数无人机:
ATC_ANG_PIT_P应从 10 减少到 6
ATC_ANG_RLL_P应从 10 减少到 6
ATC_ANG_YAW_P应从 10 减少到 6
ATC_RAT_YAW_P应从 1 降低到 0.5
ATC_RAT_YAW_I 的值应该 = ATC_RAT_YAW_P x 0.1
注:只有当自动调参产生更高的值时,才应更改上述这些值。小型特技飞机可能更倾向于保持这些值并尽可能高。
- 一般而言,对于俯仰角和横滚角,P 和 I 的值应该相等,D 应该是 P 的 1/10。
- 一般而言,对于偏航角,在大多数情况下,I 应该是 P 的 1/10,D = 0。
- 针对大桨叶得多旋翼无人机,如果在定高模式下,快速前飞后突然减速时出现俯仰超调,飞行器姿态不稳定时。
可以增大参数ATC_THR_MIX_MAX(默认0.5),这个参数控制着姿态控制与油门控制之间的优先级分配!
当姿态控制和油门控制发生冲突时,系统优先响应哪个控制需求?
ATC_THR_MIX_MAX的值越大(接近1.0),姿态控制的优先级越高!值越小(接近0),油门控制的优先级越高
所以增大这个值会使得姿态控制优先级提高,系统更专注于保持姿态稳定,减少俯仰超调现象,特别适合大桨叶多旋翼(因为大桨叶更容易受到气流影响)
但是,增大这个值也会带来潜在风险:过高导致飞行器严重振荡,系统会优先纠正姿态振荡,可能无法充分降低油门,飞行器可能难以下降,存在安全隐患!
附:常见问题:
- 地面站提示:Twitch Size Determination Failed 无法做抽动测试,通常情况下的遥控器的某个通道没有归中,导致调参被迫中断。
解决方案1:调参过程中,增加遥控器的油门死区,将RC1_DZ、RC2_DZ、RC3_DZ、RC4_DZ设置为50!
然后将RC通道7先从高位打到低位,然后再从低位打回高位,重新开启调参!
解决方案2:如使用过小的AUTOTUNE_AGGR参数,调参过程中也可能出现Twitch Size Determination Failed的提示!
因此可以提高AUTOTUNE_AGGR参数的值!
- 地面站提示:pilot overrides active
解决方案:调参过程中不要打杆!如果没有打杆也提示此消息,那么参考也是增加遥控器的油门死区,将RC1_DZ、RC2_DZ、RC3_DZ、RC4_DZ设置为50!
- 调完飞机发现太窜、太抖、太灵敏(overly twitchy),把 AUTOTUNE_AGGR 改小一点(但不能低于 0.05)
- 调完飞机发现太肉、太散、反应慢(sloppy), AUTOTUNE_AGGR 改大一点(但不能高于 0.1)