首飞注意2.2-飞行模式确认、辅助通道设置
前言:6种常用的飞行模式 详见文档: 《常用的飞行模式介绍》 一、飞行模式设置 在地面站的 初始设置 -> 飞行模式页面 中,可对无人机的飞行模式进行配置。 切换遥控器的3档开关,正常可以看到 每一个档位对应一个模式位置,可通过下拉选...
前言:6种常用的飞行模式
详见文档:《常用的飞行模式介绍》
首飞建议设置的飞行模式
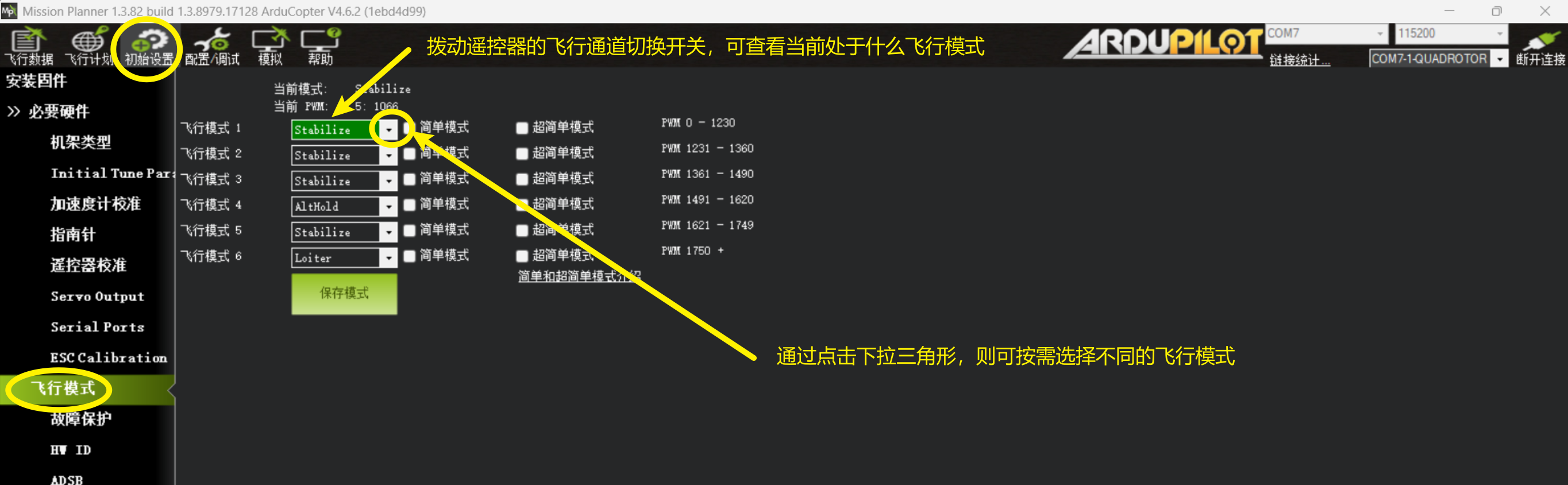
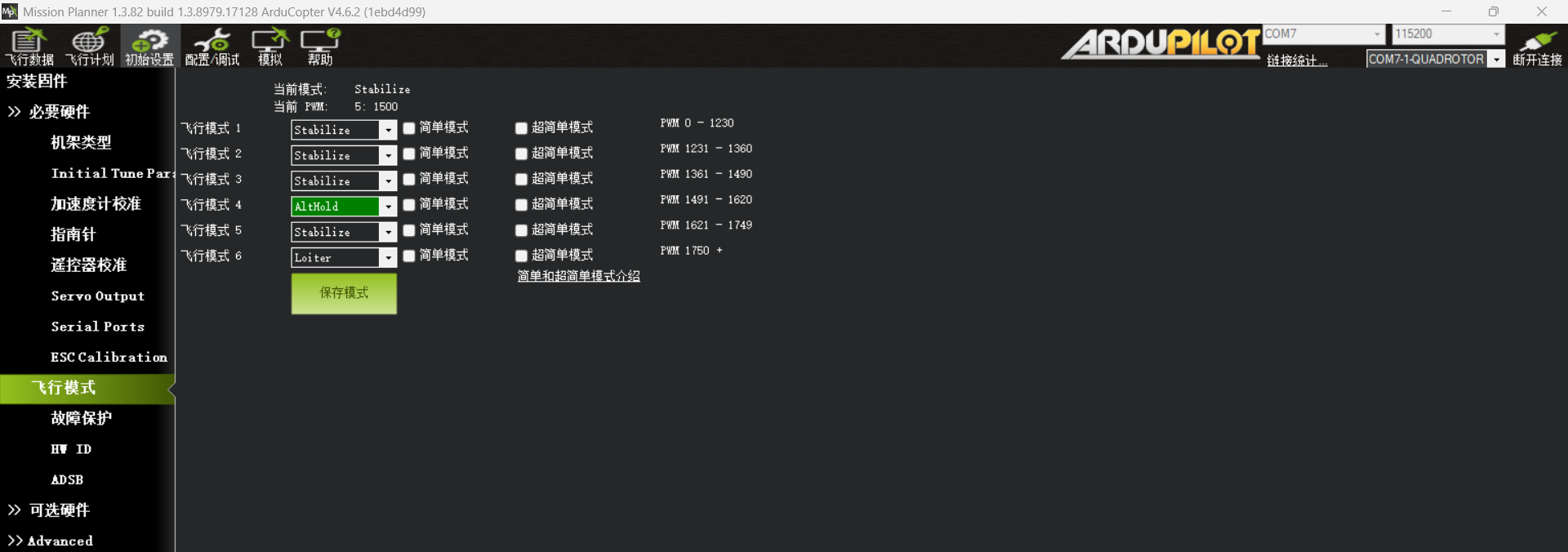
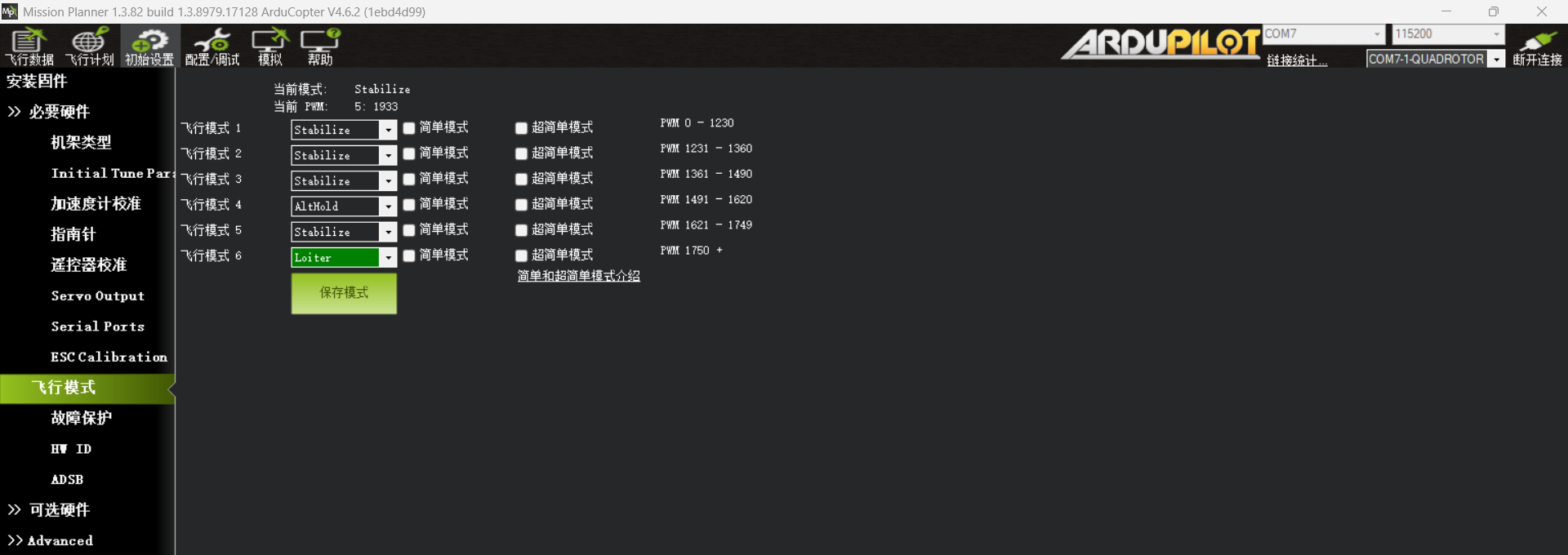
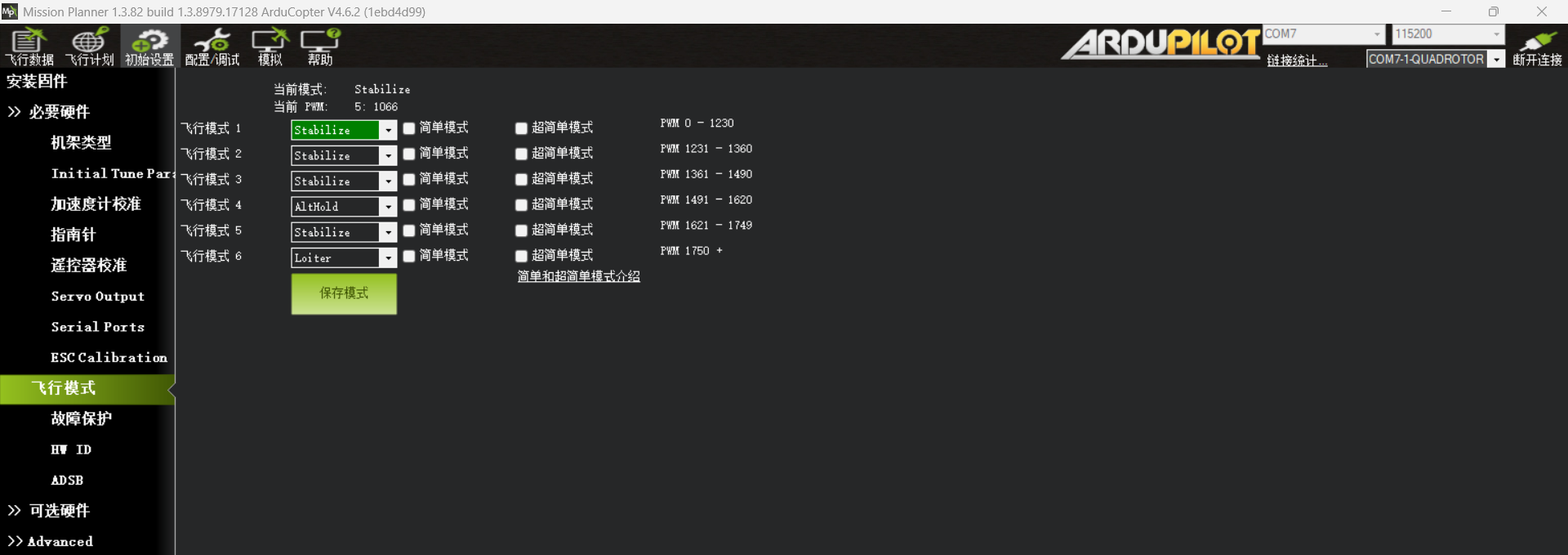
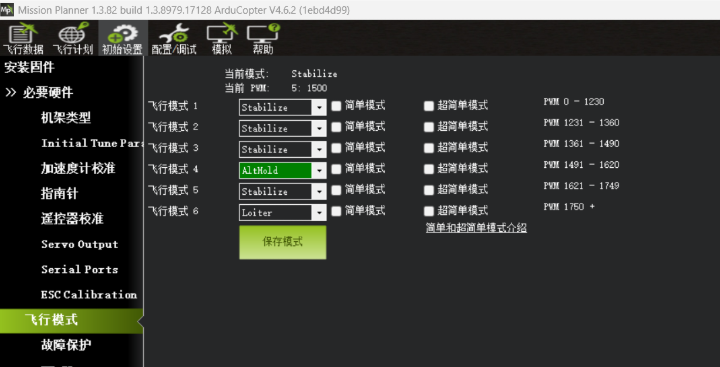
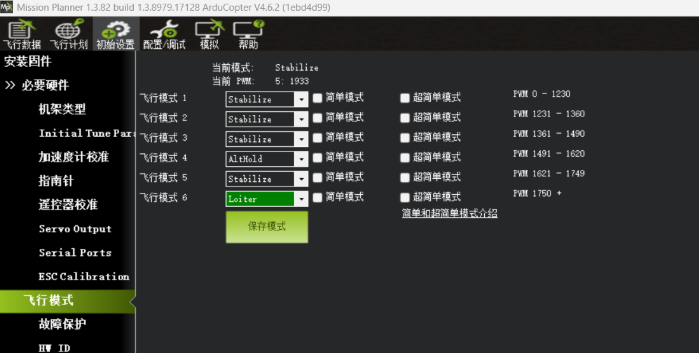
在地面站的初始设置->飞行模式页面中,可对无人机的飞行模式进行配置。
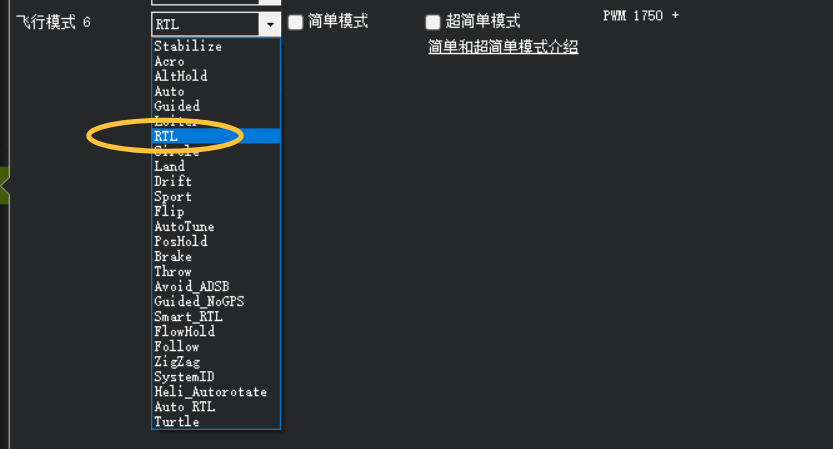
切换遥控器的3档开关,正常可以看到每一个档位对应一个模式位置,可通过下拉选择该位置的飞行模式,然后点击保存模式。
1、纯新手建议设置这3个模式(定高、定点、返航):
无人机具备较高的危险性,如果是纯新手建议先练习模拟器,掌握基本的飞行知识,可查阅以下文档《凤凰模拟器练习多旋翼的四面悬停》
像AP固件这种开源无人机固件,其实不建议纯新手小白进行首飞,最好找一个飞行技术比较扎实(起码四面悬停及自稳模式能够稳定操作)的小伙伴来协助首飞!
1)定高模式(Althold)
对于纯新手小白,本人建议直接使用定高模式进行起飞(正常应该是先用自稳起飞,然后再切为定高,但是自稳模式非常灵敏,部分新手朋友可能控不住!)
在定高模式下,油门摇杆在中位时,无人机会通过气压计进行高度保持。
该模式下,无人机的电机输出会比较缓慢,油门需要推到高于中位摇杆时,无人机才会缓慢起飞。(默认参数,当油门最大时,只能以2.5m/s的速度上升)
当无人机要下降的时,油门则需要拉到低于中位(可能更低),无人机才会缓慢降落。
2)定点模式(Loiter)
在搜到卫星后,无人机油门摇杆在中位、俯仰横滚摇杆也位于中位时,无人机将会悬停。(该模式特别适合新手,注意前提是要搜到卫星)
3)返航模式(RTL)
使用该模式的前提是无人机的卫星颗数,必须大于8颗并且处于3D定位模式,无人机解锁瞬间就会记录起飞点的位置。
一般使用好一点的GPS模块,上电等待后在空旷区域等待个1分钟就会满足上述条件!
当新手各种打杆飞高、飞远看不到飞机的姿态时。此应迅速切换到RTL模式,无人机将会自动朝着起飞点的返航并降落。
使用RTL模式,请务必检查最低的返航高度参数 ALT_RTL(默认参数只有1500cm,即15m)。
如果此时我们设置的返航高度只有15m,但我们飞的 高度有30m,那么无人机返航时则会按照当前的高度进行返航。
2、有飞行经验的老手设置这3个模式(自稳):
1)自稳模式(stabilize)
该模式会控制姿态的稳定!(不会像穿越机手动模式那样,打杆能把飞机打翻),但自稳模式不具备定高以及定点能力。
在自稳模式下,需要手动频繁调整油门杆来控制高度,也需要手动频繁调整俯仰杆和横滚杆来控制位置,避免飘太远!
此外,在这个模式下,油门输出会非常迅速,轻轻推油就会快速窜起来!!!
2)定高模式(Althold)
在定高模式下,油门摇杆在中位时,无人机会通过气压计进行高度保持。
但是油门速度的响应速度非常缓慢,需要下降时,要下拉比较大的油门杆幅度。
3)定点模式(Loiter)
在搜到卫星后,无人机油门摇杆在中位、俯仰横滚摇杆也位于中位时,无人机将会悬停。(该模式特别适合新手,注意要搜到星质量好才能精准定位,否则可能会漂移)
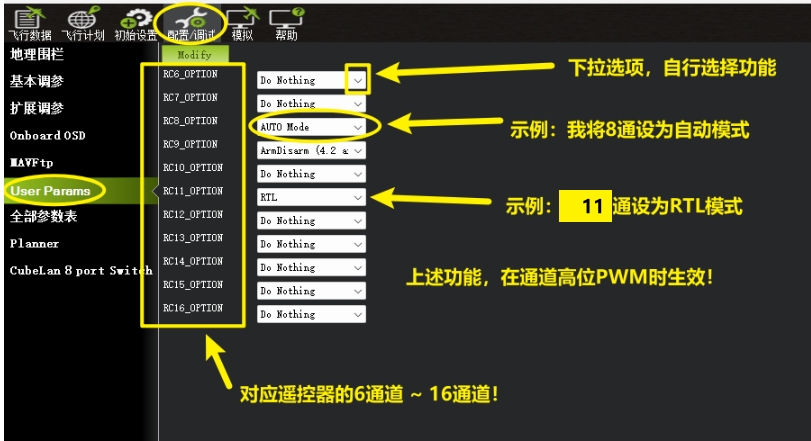
扩展辅助通道
一般情况下遥控器的挡位开关只有3档,假如我们的飞行挡位已经设置了:自稳模式、定高模式、定点模式,但是此时如果还想设置一个RTL模式
此时我们可以利用辅助扩展通道的功能,在通道6~通道16中设置特定的功能,如下图所示:
我将自动模式设置到了8通道;将RTL模式设置到了9通道!