10)水平方向微调(AutoTrim)
一、什么时候才需做水平微调?
当我们的无人机,在一个没有完全没有风的环境中使用自稳模式(stabilize)起飞时,飞行器都依然会严重往一个方向飞,
(轻微的漂移是正常的,因为自稳模式没有定点),需要手动打杆一直修正。这个可以通过“保存微调”或“自动微调”功能来纠正,让飞行器自动记录偏移,从而实现平稳飞行。
注意:水平微调对于大多数用户来说,此过程是不必要的,一般做加速度计校准可以解决这个问题。
1) 先做机架、无刷电机的安装水平度检查。先确认是否因为机架或无刷电机的安装不水平从而导致姿态倾斜的问题。
2)然后再进行加速计重新校准,加速计的水平校准很重要,如果不水平,是直接导致飞行器往一个方向偏。
如上述校准后都无效,才考虑使用水平微调功能。
二、自动水平微调的流程
1)找到一个无风且有足够空间大的场地,确保不会撞到任何东西!
2)将无人机放置在水平地面上,将飞行模式切换到自稳模式(stabilize)
3)使用遥控器解锁,将油门杆拉到最低,偏航打到最右执行解锁动作,当无人机解锁后继续保持打杆15s。
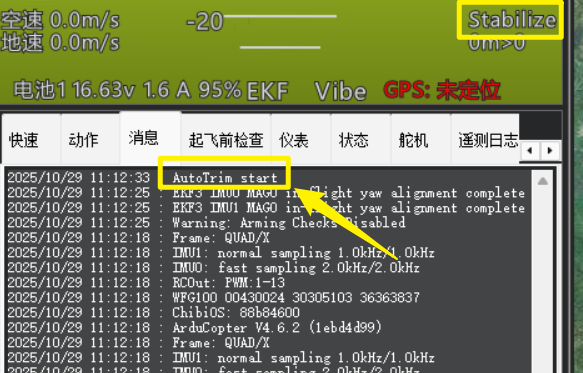
4)进入AutoTrim模式,此时通过MP地面站的消息可以看到提示“AutoTrim start”
5)起飞无人机,手控无人机让其在空中,稳定悬停约 25 秒(需要飞手能控细腻控制悬停)
6)落地后将油门拉到最低,等待10s,等待参数保存。
7)再次以自稳模式(Stabilize)解锁起飞,查看无人机是否还会漂移,如果还会则重复上述步骤继续微调。
三、通过遥控器微调
3.1 软件设置
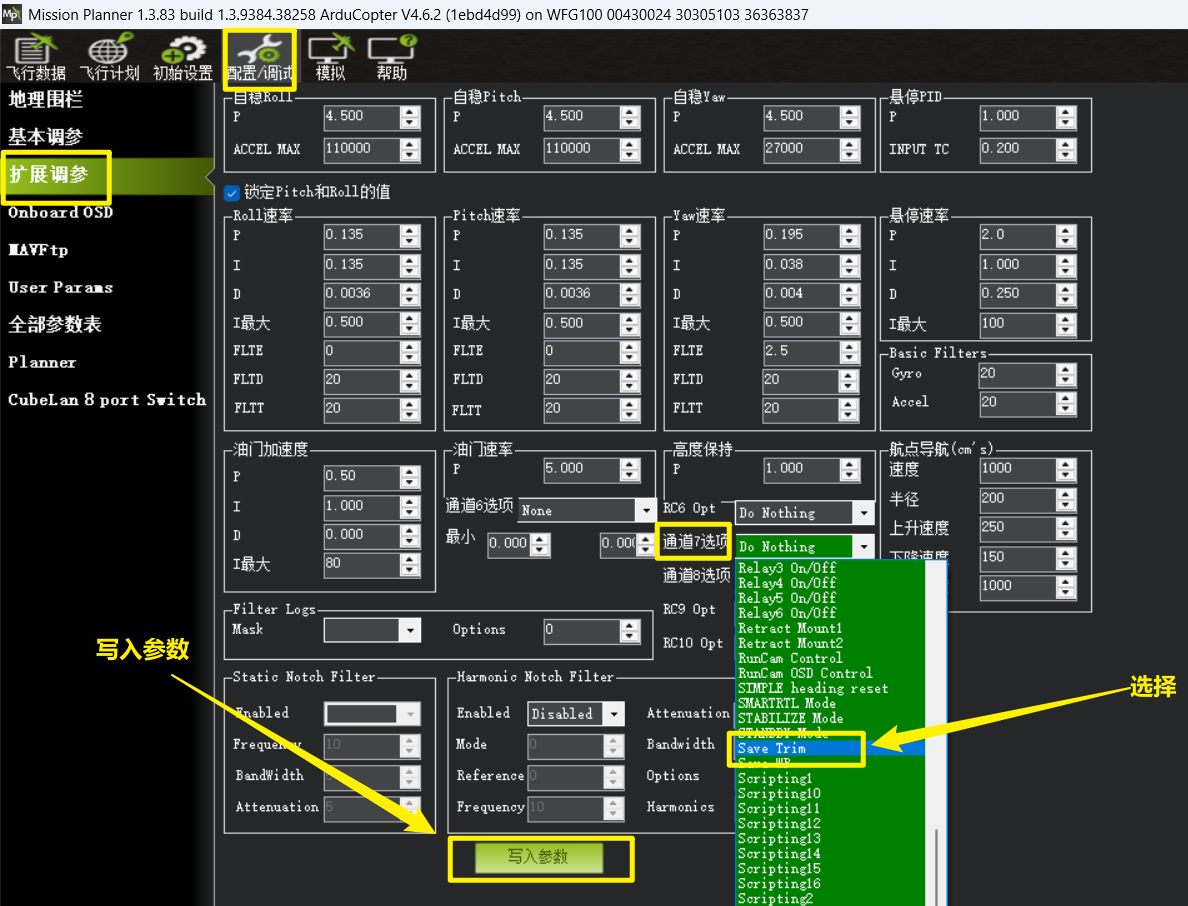
使用保存微调的方法也很简单,需要使用个段式开关进行配置,本例子采用CH7通道
1)首先确认在校准遥控器的时候,已经校准了一个第七通道,而且有一个1800以上的值 (可以使用一个2段开关)
2)在地面站软件上,设置CH7通道的功能设置为参数保存,当这个通道处于高位PWM时,就会触发保存参数!
如下图所示:
3.2起飞无人机
1)将飞行模式挡位切到自稳模式(stabilize),将保存微调参数的7通道切换到低位PWM挡。
2)起飞无人机,通过遥控器上的俯仰微调按键、横滚微调按键对无人机进行微调,直到无人机肉眼可不会再
有明显朝一个方向偏移的趋势。

3)降落飞行器,将油门收到最低,将保存微调参数的7通道切换到高位PWM挡保持1S以上。此时飞控将会自动保存遥控器的微调值。
4)遥控器的微调开关恢复到所有值都是0,如下图方框所示:
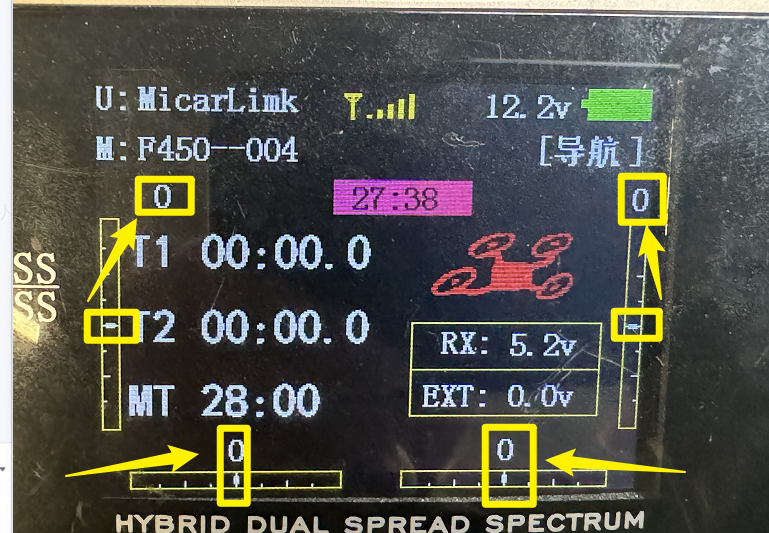
4)再次使用增稳模式飞行,检查飞行器是否已经平稳,如果不行,请重复上述步骤!
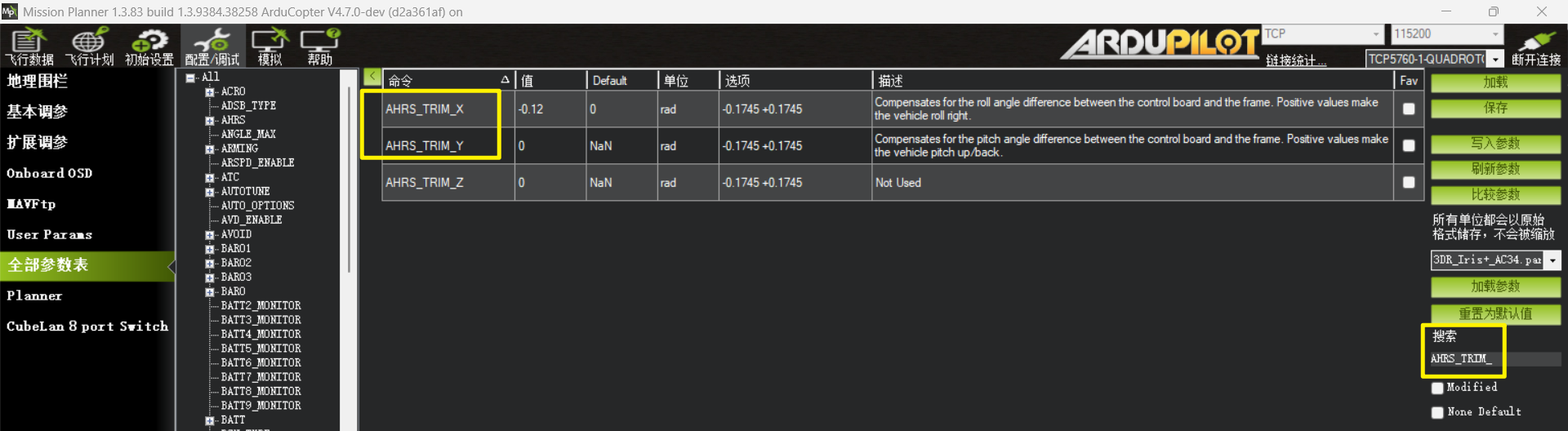
四、通过修改参数进行微调
用还可以通过参数AHRS_TRIM_X、参数AHRS_TRIM_Y来手动设置配平。单位是弧度,有正负之分。
其中X是横滚,Y是俯仰。左横滚是负数、前俯仰是负数!