3)MP地面站基础介绍
MP其他相关文档链接:
《地面站的安装与连接》
《MP地面站模拟器的使用》
《航线快速入门(视频教程)》
《地图选点飞行(引导模式)》
《MP如何模拟垂起》
《航线管理(保存、加载、写入、读取、清除)》
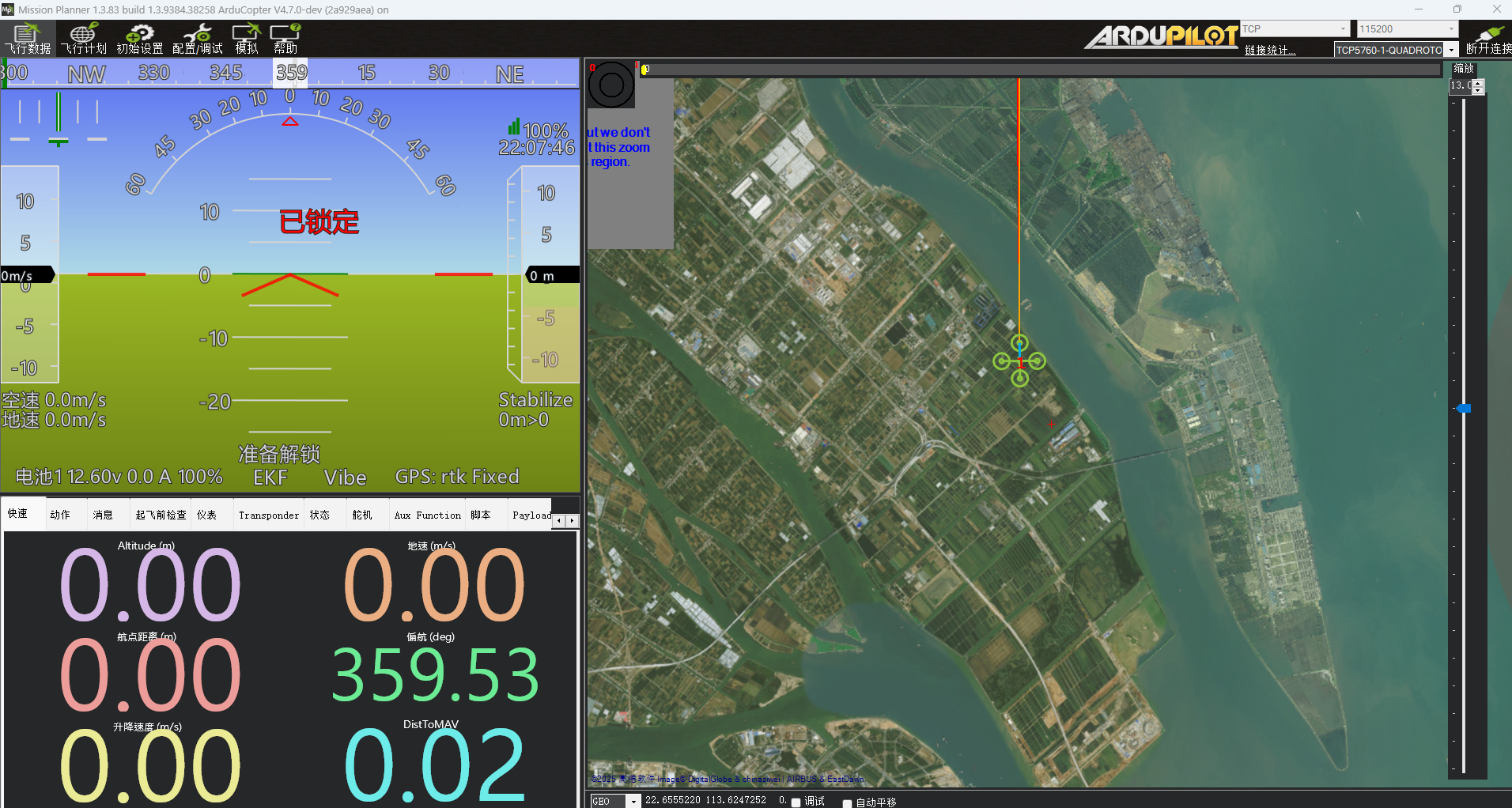
地面站的页面布局

打开mp1.3.83版本,可看到上述页面。在MP地面站软件的首页中,主要分为以下几个区域,分别是:
1)链接方式选择栏
2)飞行姿态仪表盘(HUD)
3)快速数据显示栏
4)任务指令栏
5)地图显示界面
6)地图小工具、调试小工具
7)功能页面切换(选项栏):
1、链接方式选择栏
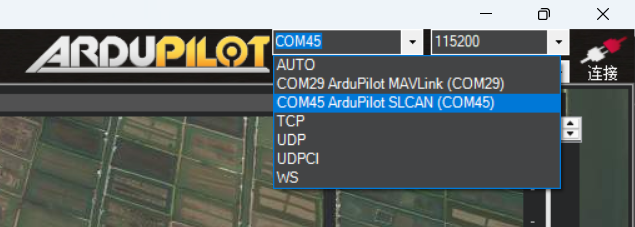
用户使用USB数据线或是无线数传电台连接时,选择COM口即可(最常用的连接方式),在4.6.2的固件中,当数据线插入后会显示两个COM任意选择一个并配好波特率即可连接。(使用USB线连接时波特率选择115200、一般使用无线数传电台连接时波特率选择57600)
注意:COM口后面必须是带有Ardupilot字眼,有些朋友将飞控插上后,只显示一个COM口是不能正常连接的。
此外,MP地面站还支持TCP、UDP、UDPCI、WS(WebSocket)的方式进行连接,后续我们再用专题来讲解这些网络连接的方式。
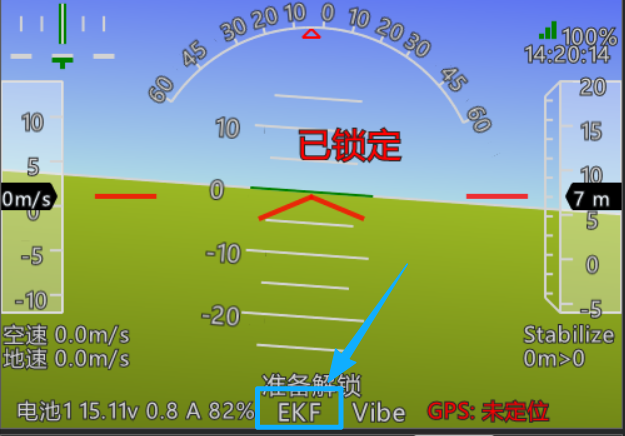
2、飞行姿态仪表盘(HUD)-总体概述
飞行姿态仪表盘(HUD)上,显示很多数据,以1.3.83版本的为例,其含义如下图所示:
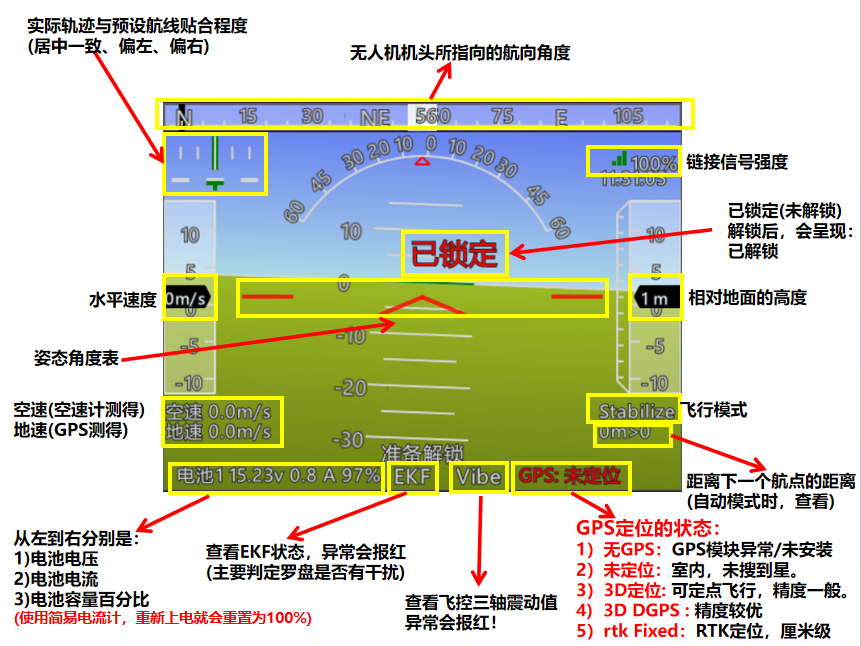
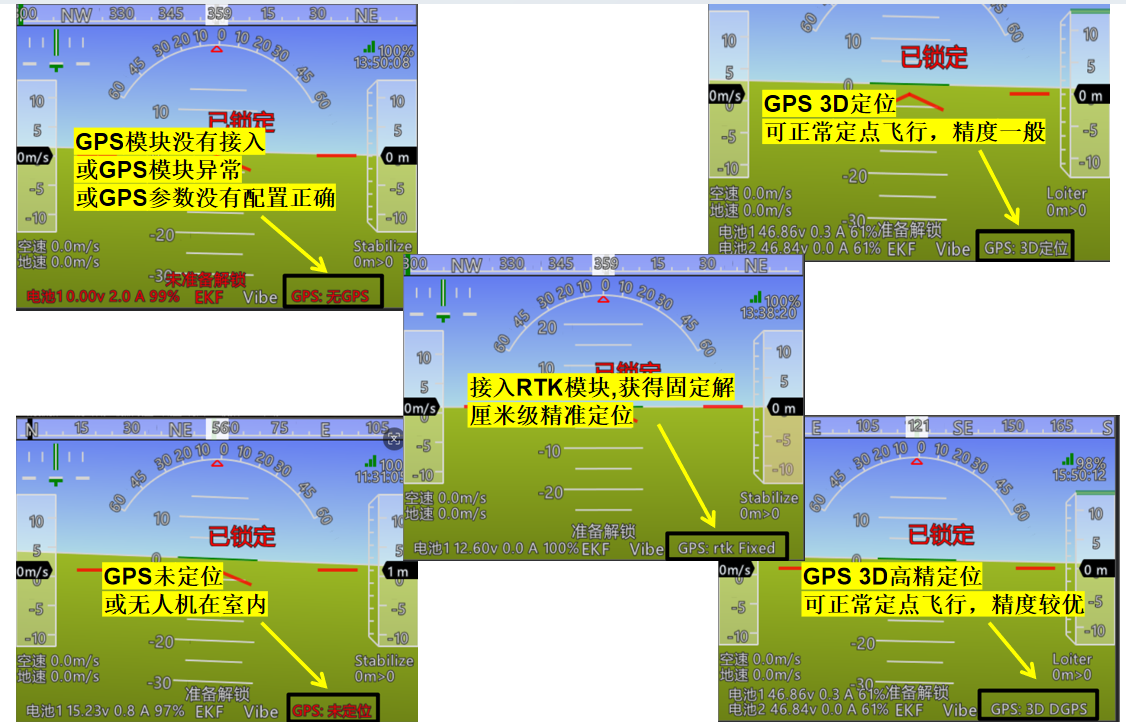
2.1 仪表盘(HUD)-GPS定位状态
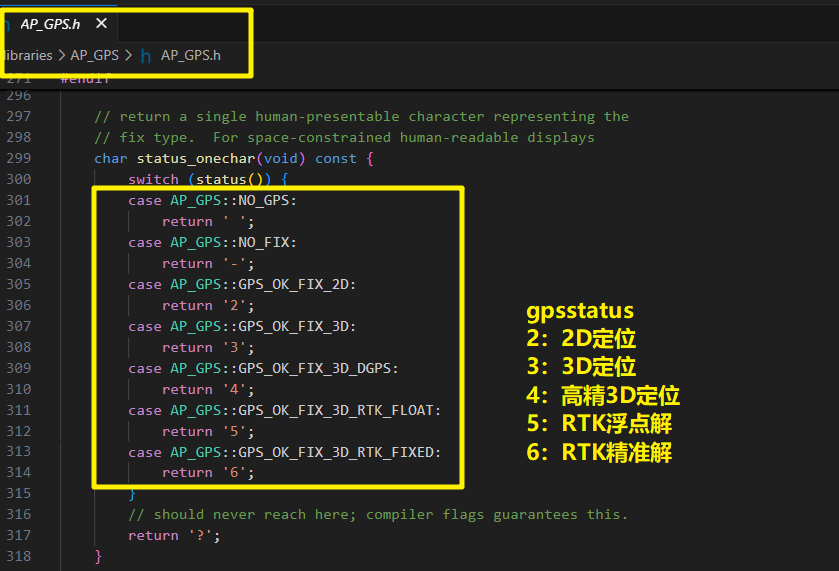
其中GPS定位状态主要有以下几种:
结合代码可知
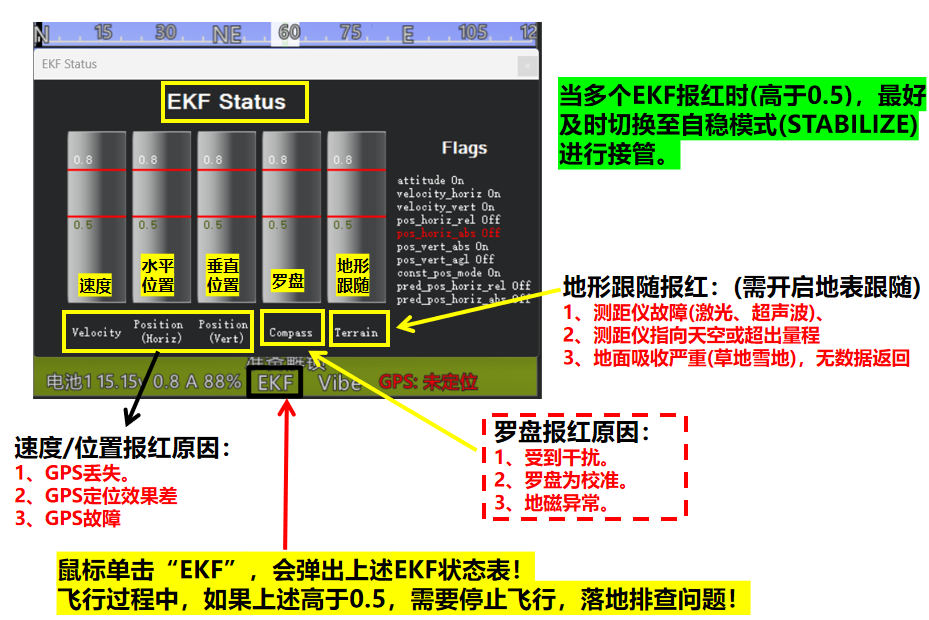
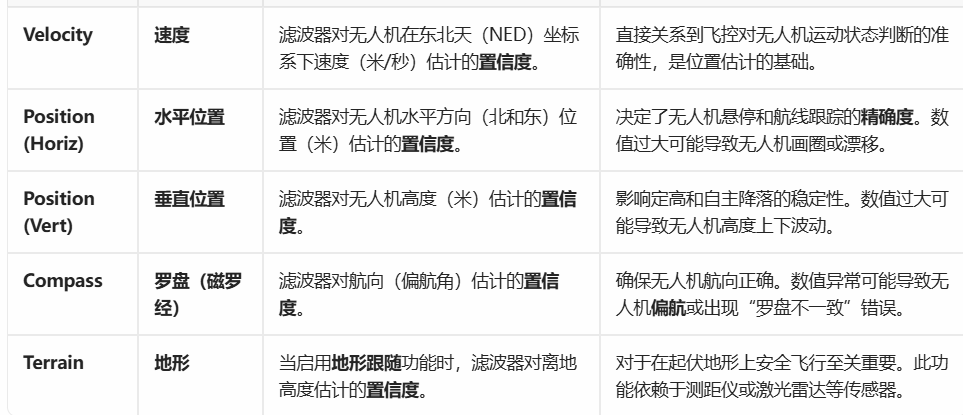
2.2 仪表盘(HUD)-EKF状态
鼠标单击 HUD表中的"EKF",可以查看EKF状态表。
通过EFK状态来判断无人机导航系统中的速度、水平位置、垂直位置、罗盘、地形匹配数据是否健康?
反映了滤波器对上述数据的估计置信度。如下图所示
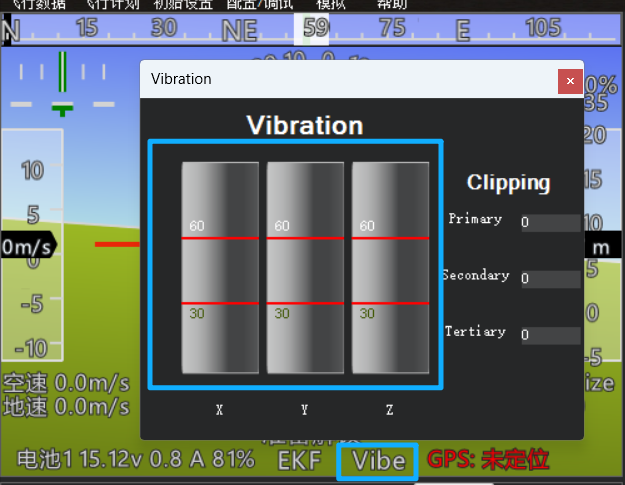
2.3 仪表盘(HUD)-Vibe状态
鼠标单击 HUD表中的"Vibe",可以查看飞控三轴的震动值,如果发现震动值高于警戒线30的一半,建议要对飞控做减震。
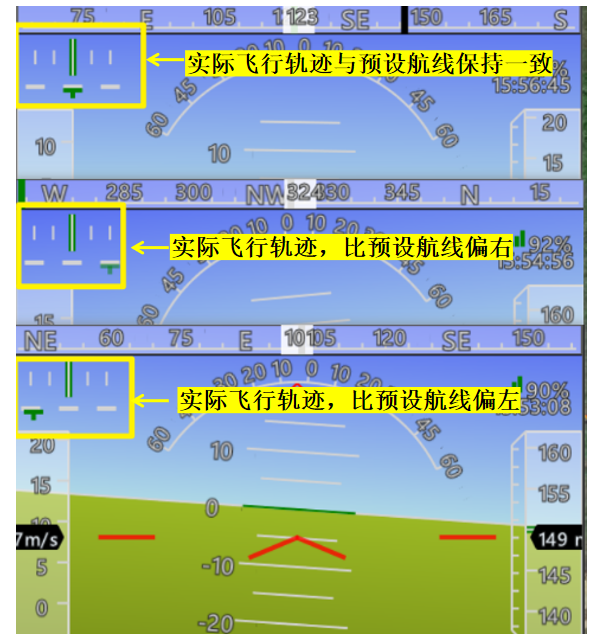
2.4飞行姿态仪表盘(HUD)-飞行轨迹偏差
很多新手朋友不知道左上角的图标是什么意思,它是实际飞行轨迹与预设航线的偏差显示。
在无人机飞行自动航线时(Auto模式),可通过轨迹偏差控件,来判断无人机实际飞行时是否压准的了航线。
一般都是有偏左偏右的误差,主要不要偏移的非常大都是可以正常接受!
3、快速数据显示栏
3.1查看快速数据
正常打开地面站,默认是就会显示在快速显示栏。

3.2设置快速数据栏的行列数据
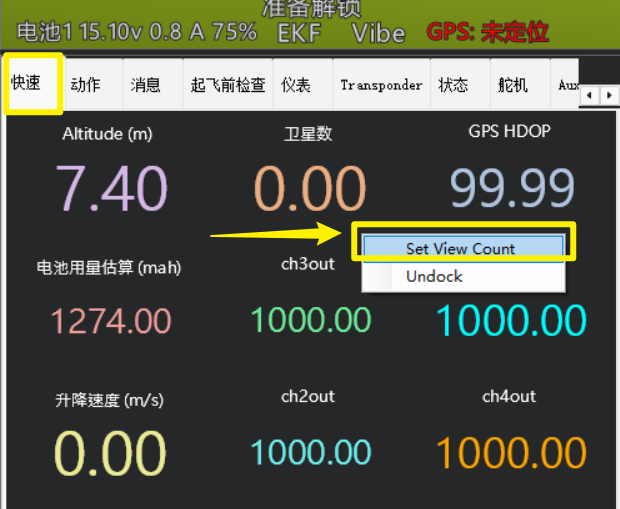
当前的是3行3列数据。如果要显示更多的行列的数据,应该怎么进行调整?
将鼠标放置在快速显示栏处,然后鼠标右键,选择Set View Count进行调整。
然后分别设置行数
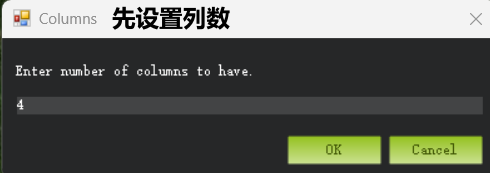
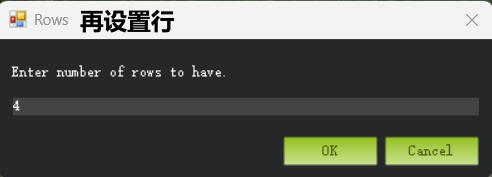
最后形成1个4行4列的数据,如下图所示

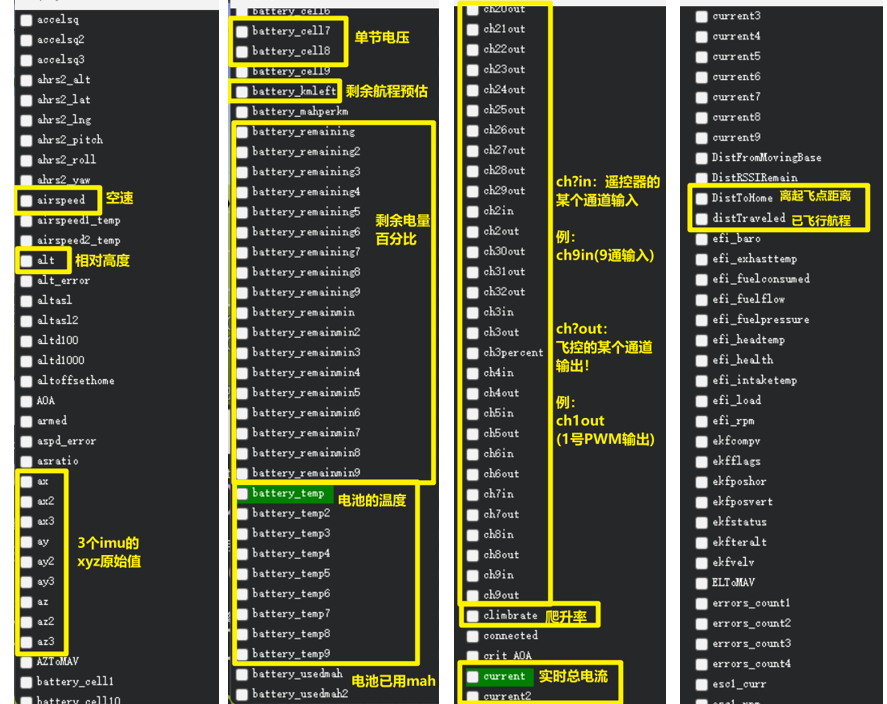
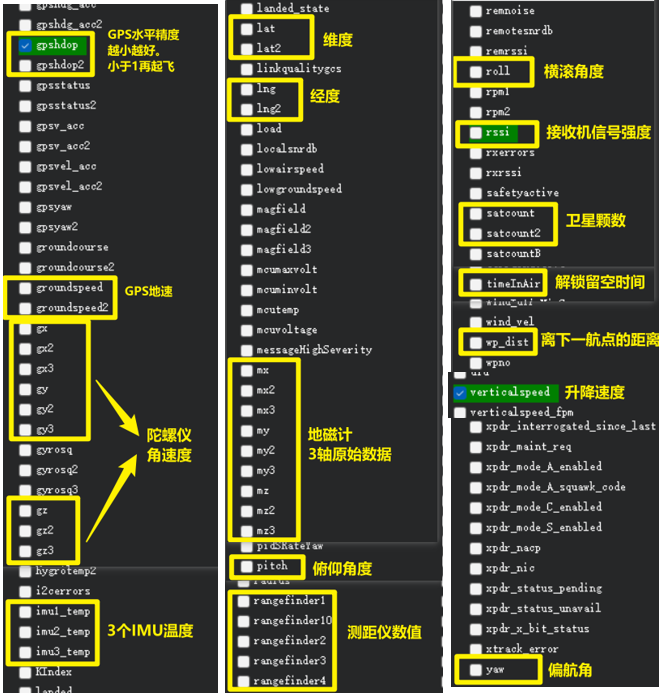
3.3如何自定义显示的数据值?
将鼠标放置至每个数据值上,然后双击即可修改的显示的内容。
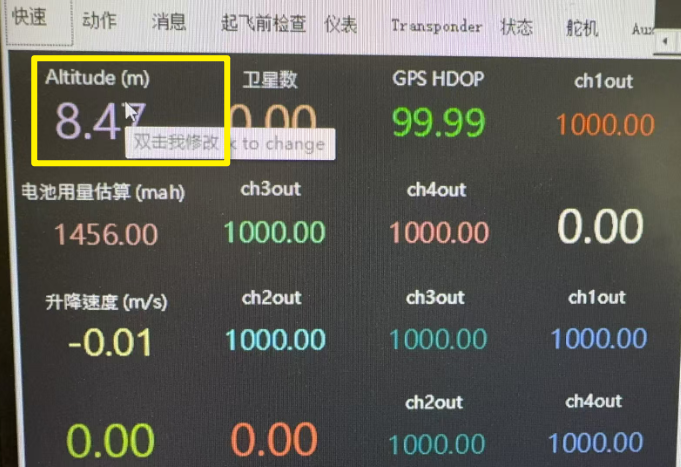
双击后,弹出以下界面,供用户自己选择要显示的 飞控数据!可以看到能够显示的数据非常多,大家也不用每一个都搞清楚是什么意思
我们只需要了解常用的10多个数据即可!

3.4快速显示栏,常用的飞控数据
4、任务指令栏
4.1 概述
任务指令栏主要包含各类对飞控下发的命令,可通过两个 进行切换。
进行切换。

它主要包含以下可选功能:
主要功能 | 所属类别 | |
|---|---|---|
快速 | 实时显示关键飞行参数,如高度、地速、航向角、升降速度、离家距离等。双击可自定义显示内容。 | 高频使用 |
动作 | 执行实时指令,如模式切换、任务控制(如自动航线任务的开始)、解锁/锁定电机、高度/速度调整等 | 高频使用 |
消息 | 显示飞控发送的实时信息,包括Pre-Arm(解锁前自检)提示、固件版本、硬件类型等,用于故障诊断 | 高频使用 |
起飞前检查 | 检查飞行条件(如GPS卫星数、电压、传感器状态),不满足条件时显示红色,通过则显示绿色,降低新手风险 | 可用可不用 |
仪表 | 左上角的主显示屏,以图形化形式展示飞机姿态、高度、GPS状态、飞行模式等,直观监控飞行状态 | 无关紧要 |
Transponder | 用于配置ADS-B应答器(如有安装),发送飞机身份和位置信息,增强空域感知 | 进阶使用 |
状态 | 显示所有传感器数据、通道输入/输出值、飞行状态等,用于详细调试和实时监控 | 偶尔查看 |
舵机 | 手动测试舵机或PWM通道输出(如控制云台、相机快门等) | 进阶使用 |
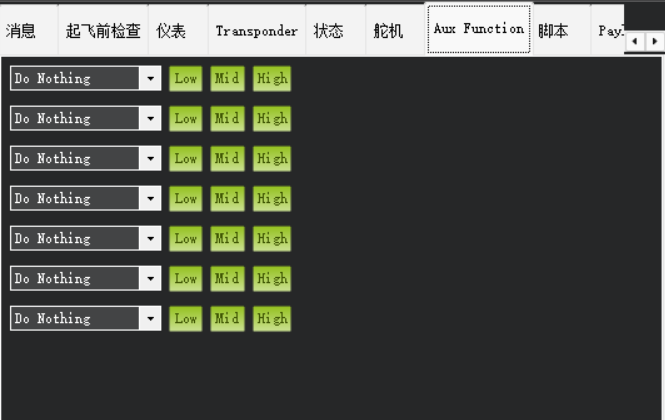
Aux Function | 配置辅助通道的附加功能(如灯光、蜂鸣器、投放机制等),通过遥控器开关触发。 | 进阶使用 |
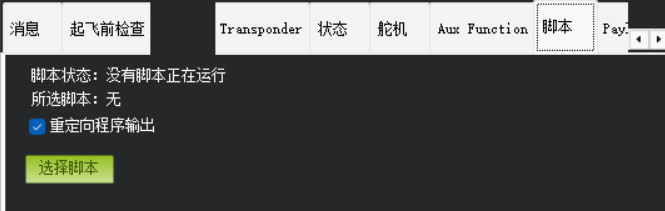
脚本 | 加载并运行自定义控制脚本(如自动化任务、特殊算法),扩展飞控功能 | 进阶使用 |
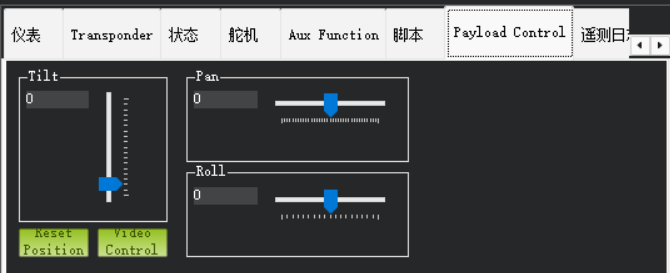
Payload Control | 控制任务载荷(如相机、传感器、机械臂),触发拍摄、投放等操作(需硬件支持)。 | 进阶使用 |
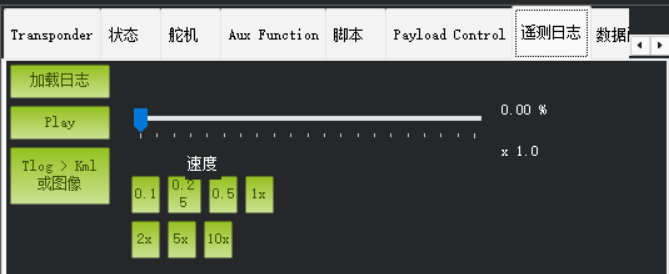
遥测日志 | 记录和回放通过无线数传实时传回的遥测数据。该日志会存在电脑上。 但是一旦数传电台卡顿/断开链接,遥测日志的数据就会丢失! | 日志分析时使用 |
数据闪存日志 | 无人机黑匣子的日志下载,可用于分析飞控内部存储器(SD卡)记录的详细飞行数据!需从飞机上进行下载。 | 日志分析时使用 |





4.2 将的任务指令栏中的各个功能显示为2行
任务指令栏中的动作很多,需要通过左右小三角形进行切换

用户可在动作栏旁的空白处,鼠标右键,选择“MultiLine”

即可变为2行显示:

4.3隐藏新手不常用的指令
通过4.1章节,我们知道在任务指令栏中,新手常用的主要使用的功能是:
快速、动作、消息、起飞前检查、状态、遥测日志、数据闪存日志
其余的都可以进行隐藏,防止误操作:

弹出窗口,取消勾选即可隐藏不常用的功能

4.4常用任务指令栏
4.4.1 快速
快速显示栏在章节3,已进行了详细介绍,此处不再赘述!
4.4.2 动作
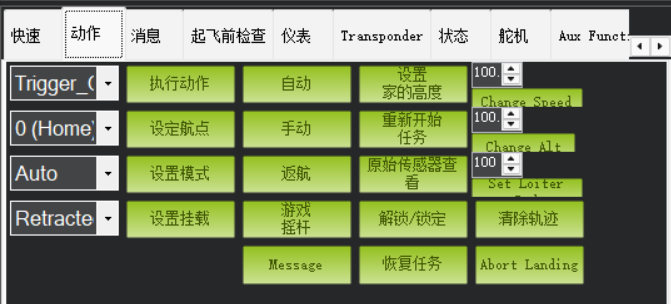
1)显示不全的问题
大家打开MP地面站的的“动作后”,可看到右侧有3处按钮显示不全,我们可以通过改变动作栏的大小来让其显示完整。
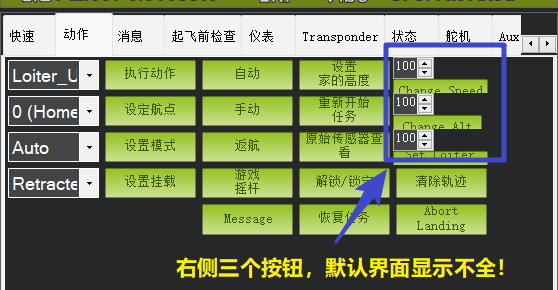
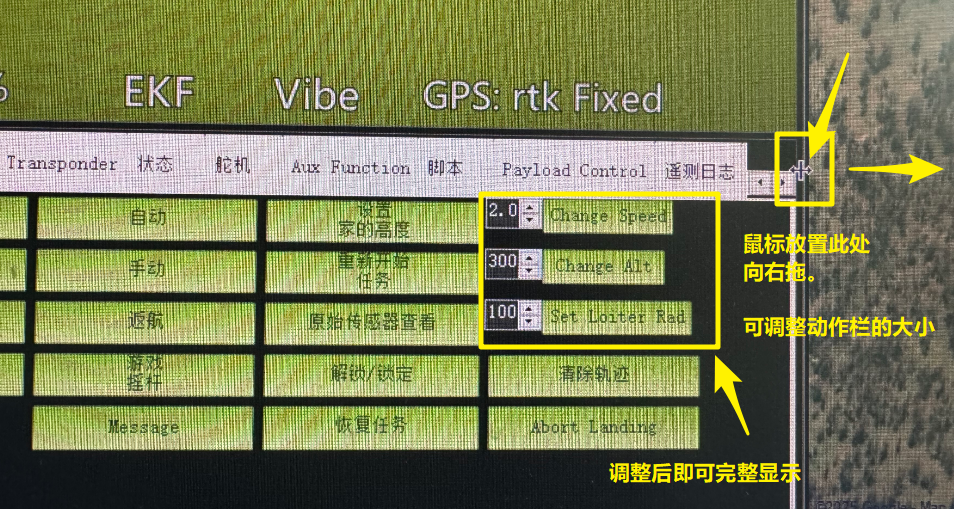
Change speed (修改飞行速度),对应设置最上面的数值修改框。(默认是100m/s)
Change Alt(修改飞行高度,此参数仅对固定翼有效,对旋翼无效),对应设置中间的数值修改框。(默认是100m)
Set Loiter Rad(修改固定翼的盘旋半径,此参数仅对固定翼有效,对旋翼无效),对应设置中间的数值修改框。(默认是100m)
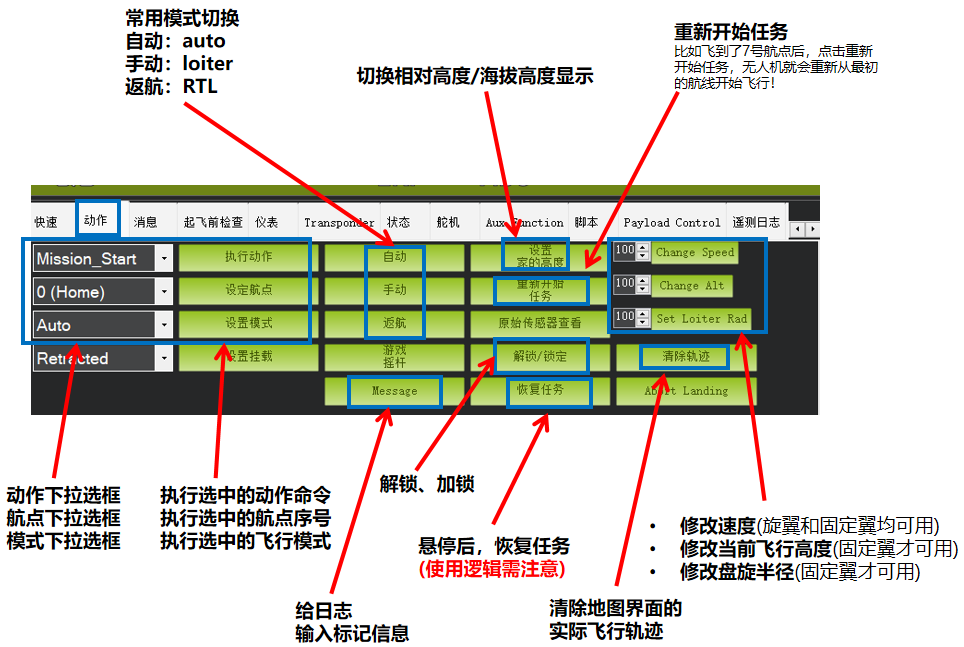
2)常用的指令一览
具体每个动作指令如何使用,请查看视频《MP地面站的基础使用》-视频待更新~~
2)常用的动作下拉列表
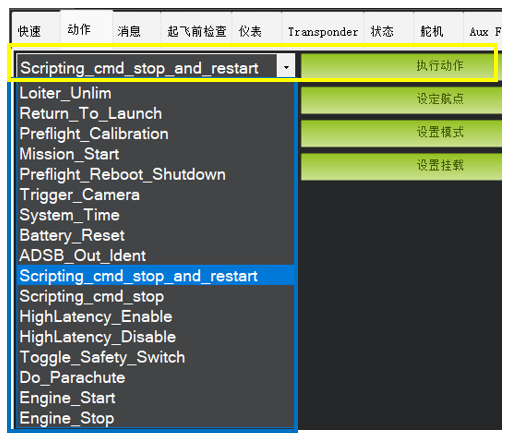

在这个动作中,最常用的是Mission_Start指令,写入航线任务并点击解锁后,执行Mission_Start指令后,无人机将会在地面自动起飞!(无需遥控器操作起飞)
在空中时,千万不要点击 “Preflight_Reboot_Shutdown” 动作,它会让飞控重启!!!!它会让飞控重启!!!!它会让飞控重启!!!!
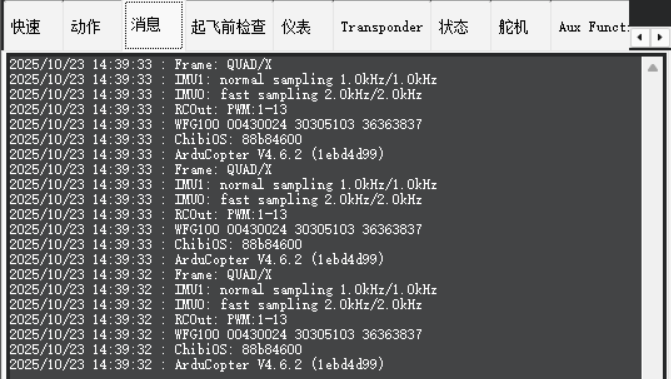
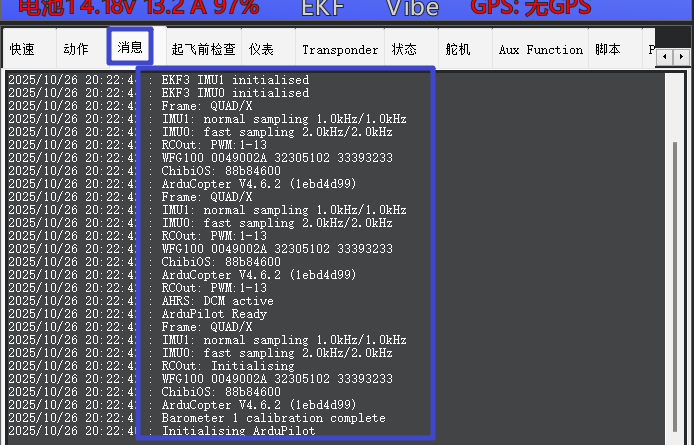
4.4.3 消息
消息栏会实时显示飞控当前打印输出的一些信息(包括基础信息、警告、错误等等)
刚上电时,飞控会打印一系列基础信息包含:飞控固件版本、硬件板型号、机架类型、电机输出口的类型(PWM还是Dshot)
解锁失败时,可切换至当前页面,查看解锁失败时,提示的报错消息。
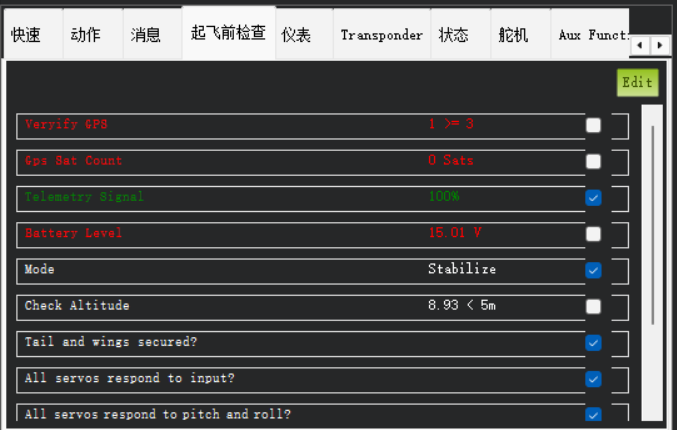
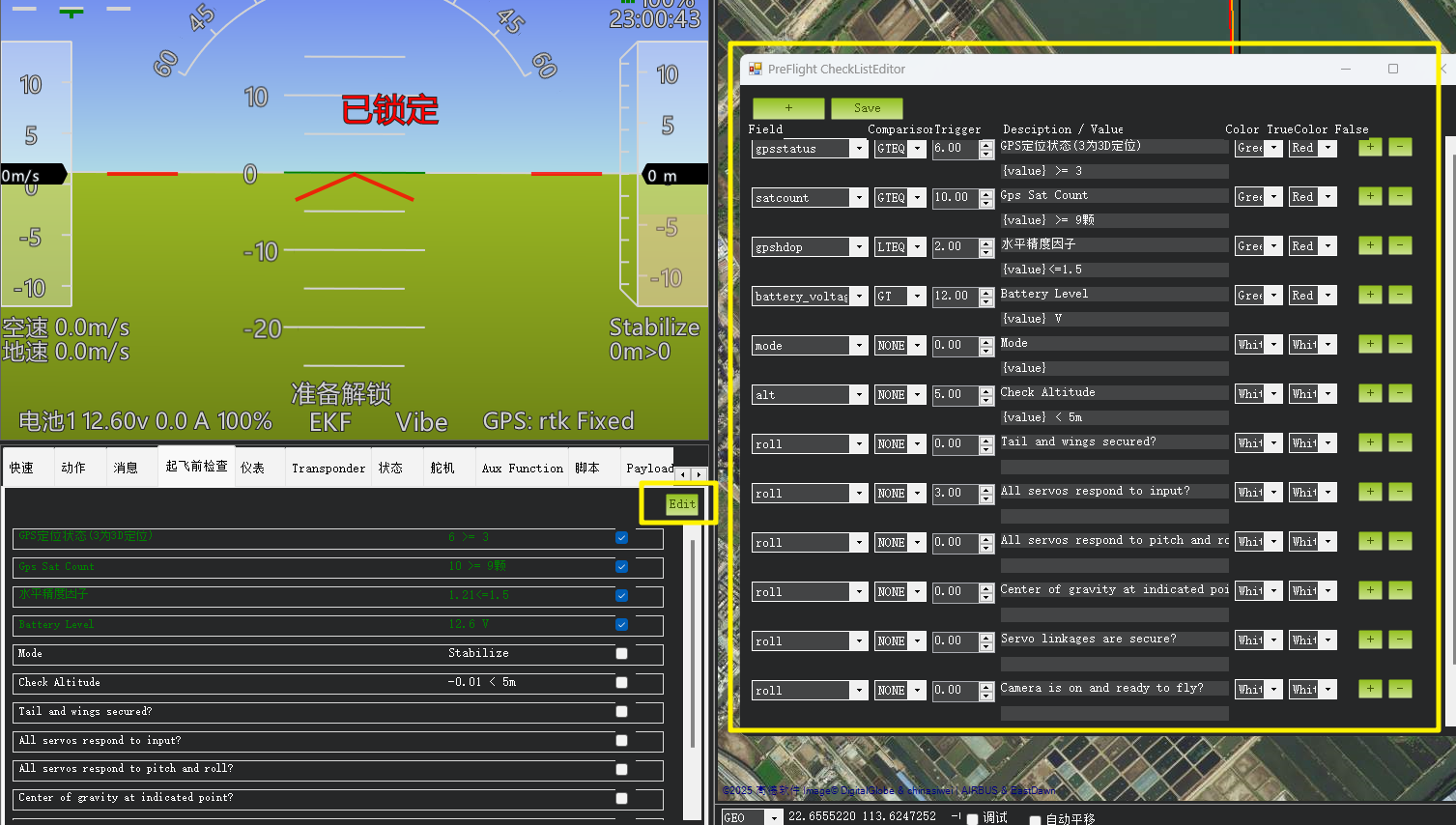
4.4.4 起飞前检查
起飞前检查支持自定义检查项目(比对飞控的当前值与预设检查值),如果检查正常则会自动打上沟。
本章节只做基础介绍,详细配置请查阅《起飞前检查》

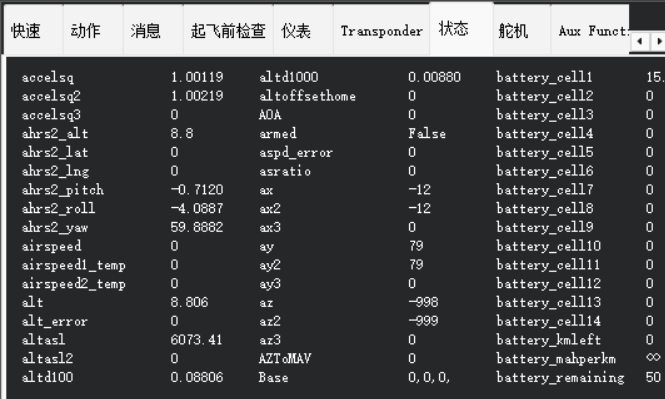
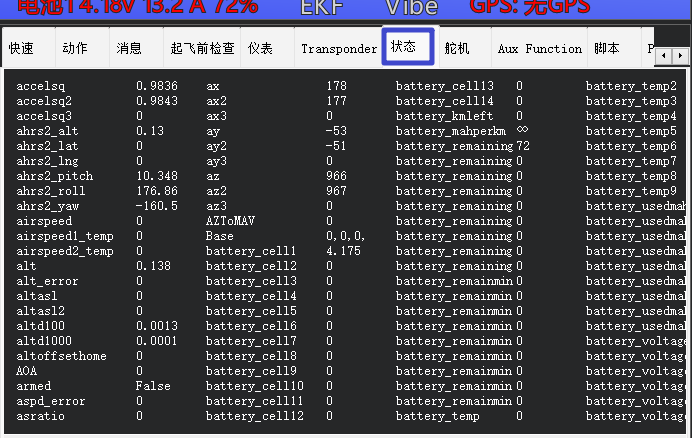
4.4.5 状态
状态的数据其实就是快速显示栏目能够选择出来查看的各类数据。
4.4.6遥测日志
遥测日志相当于对MP地面站进行录屏,数据是存在本地电脑上,但是一旦无线数传的信号不佳就会丢包造成数据空缺!

4.4.7数据闪存日志
数据闪存日志指的就是飞控上的SD卡所储存的数据,这种日志记录的数据最为全面,调参分析,故障分析都需要使用它。
但是由于它存放在飞机上,有可能飞丢或炸鸡后损坏!
在数据闪存日志里面,新手常用的指令主要有:
通过Mavlink下载闪存日志
回顾日志
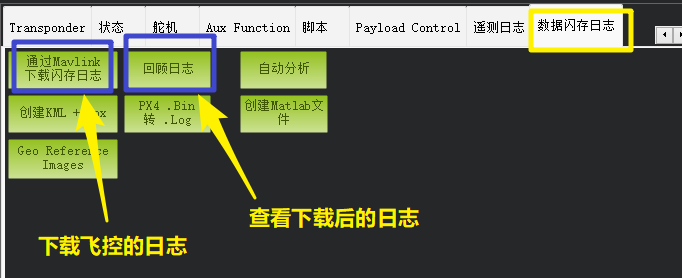
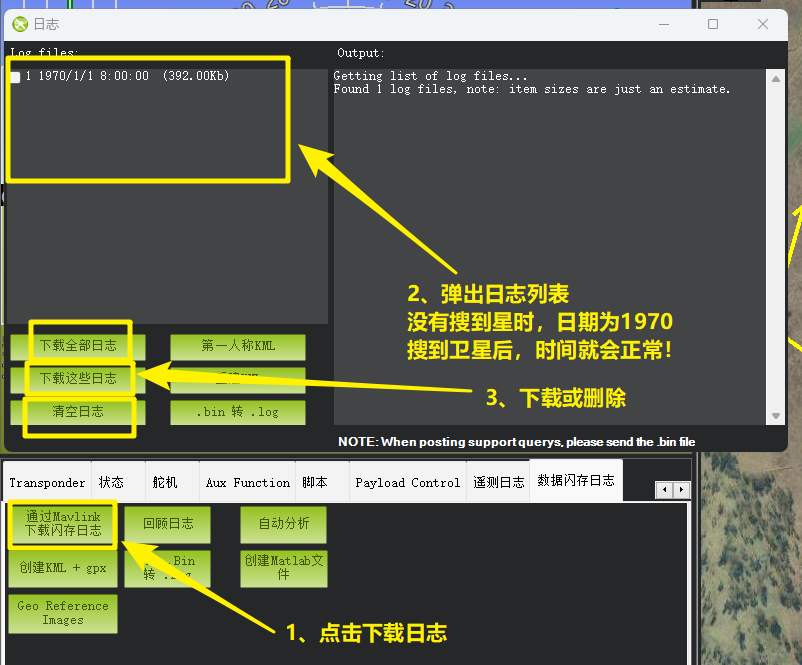
操作:通过Mavlink下载闪存日志
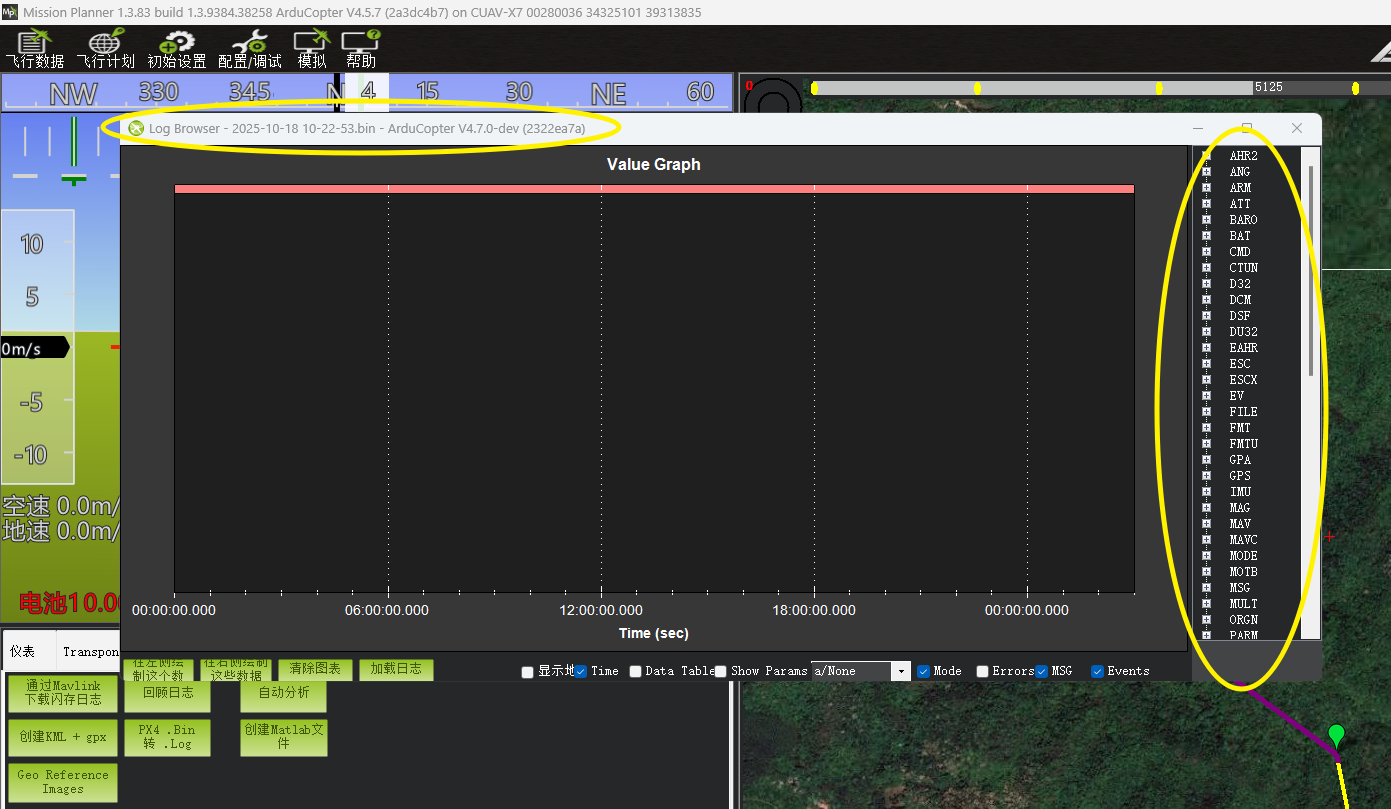
操作:回顾日志
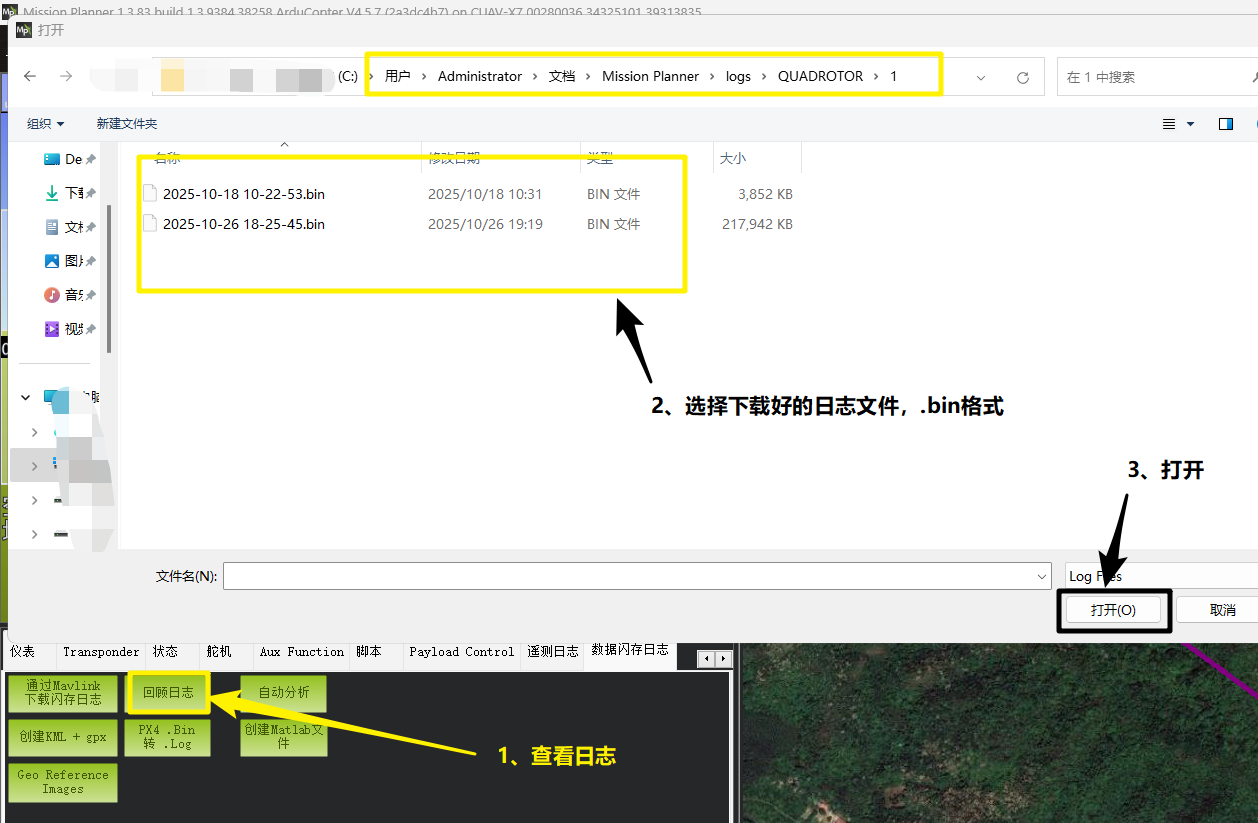
打开后.bin日志后,会呈现日志分析的界面,如下图所示:
具体的日志分析,请参阅《log日志分析专题》,此处不做深入探究!
5、地图显示界面 (6、地图小工具、调试小工具)
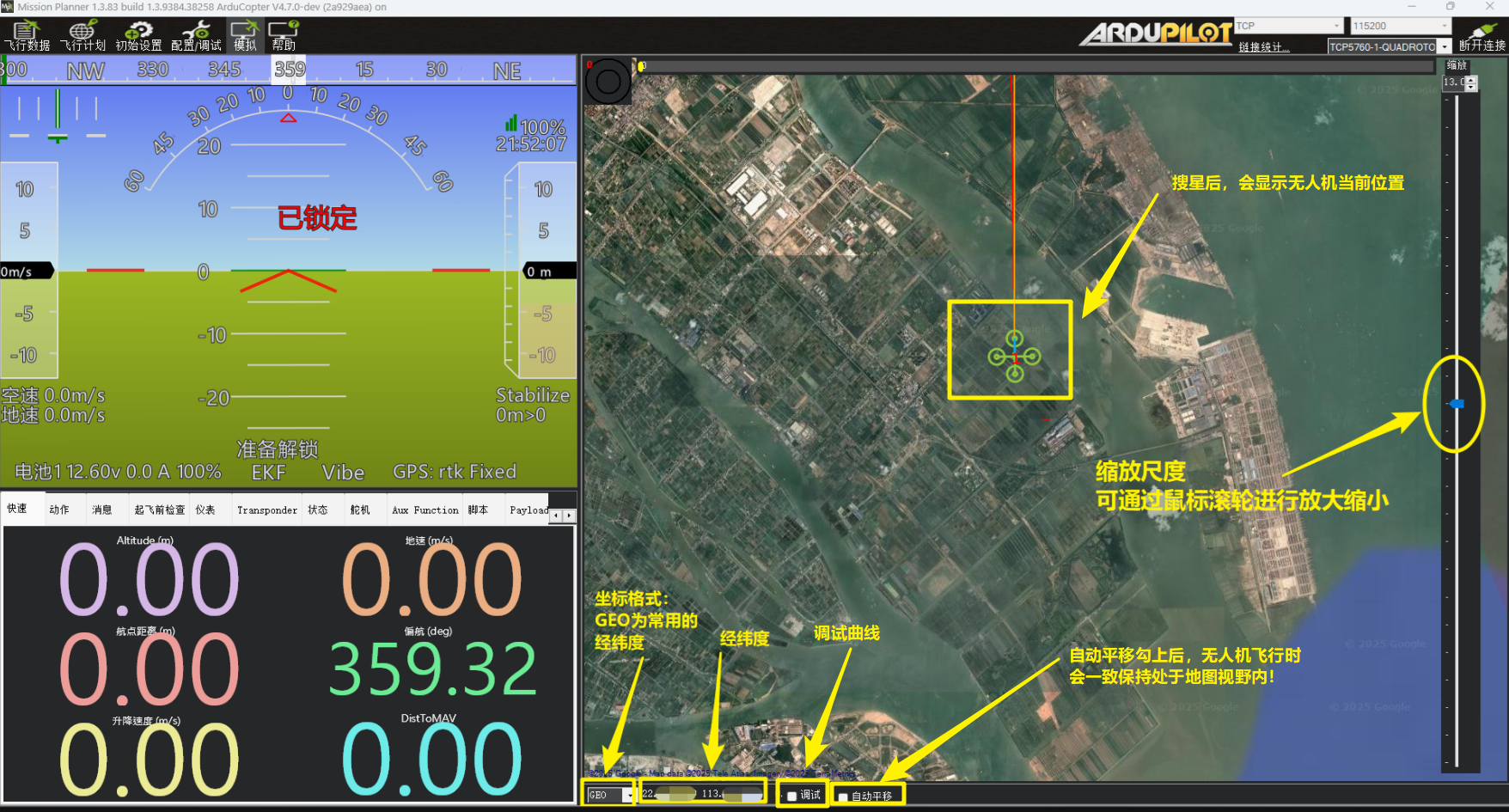
地图可在有网络的时,提前移动到某处位置,进行放大查看,MP地面站便自动缓存地图!
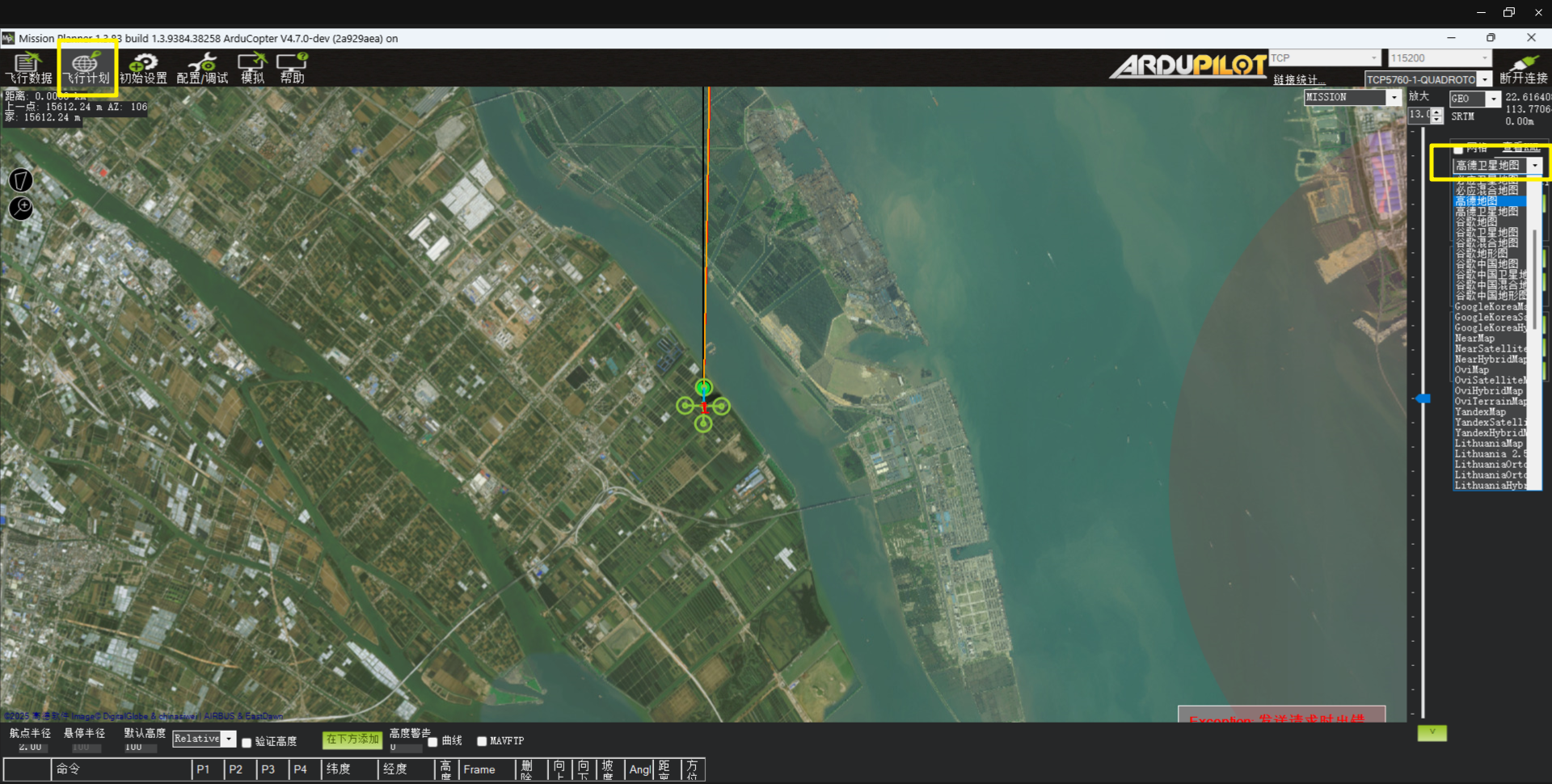
如果要切换地图类型(比如切换到高德卫星地图、高德地图灯),需要在“飞行计划”进行地图选择所需要的地图,
然后再切回“飞行数据”
7、功能页面切换
7.1 飞行数据页面
该页面是MP地面站打开的首页,主要是显示各类常见的飞行数据。
已在上述进行详细说明!
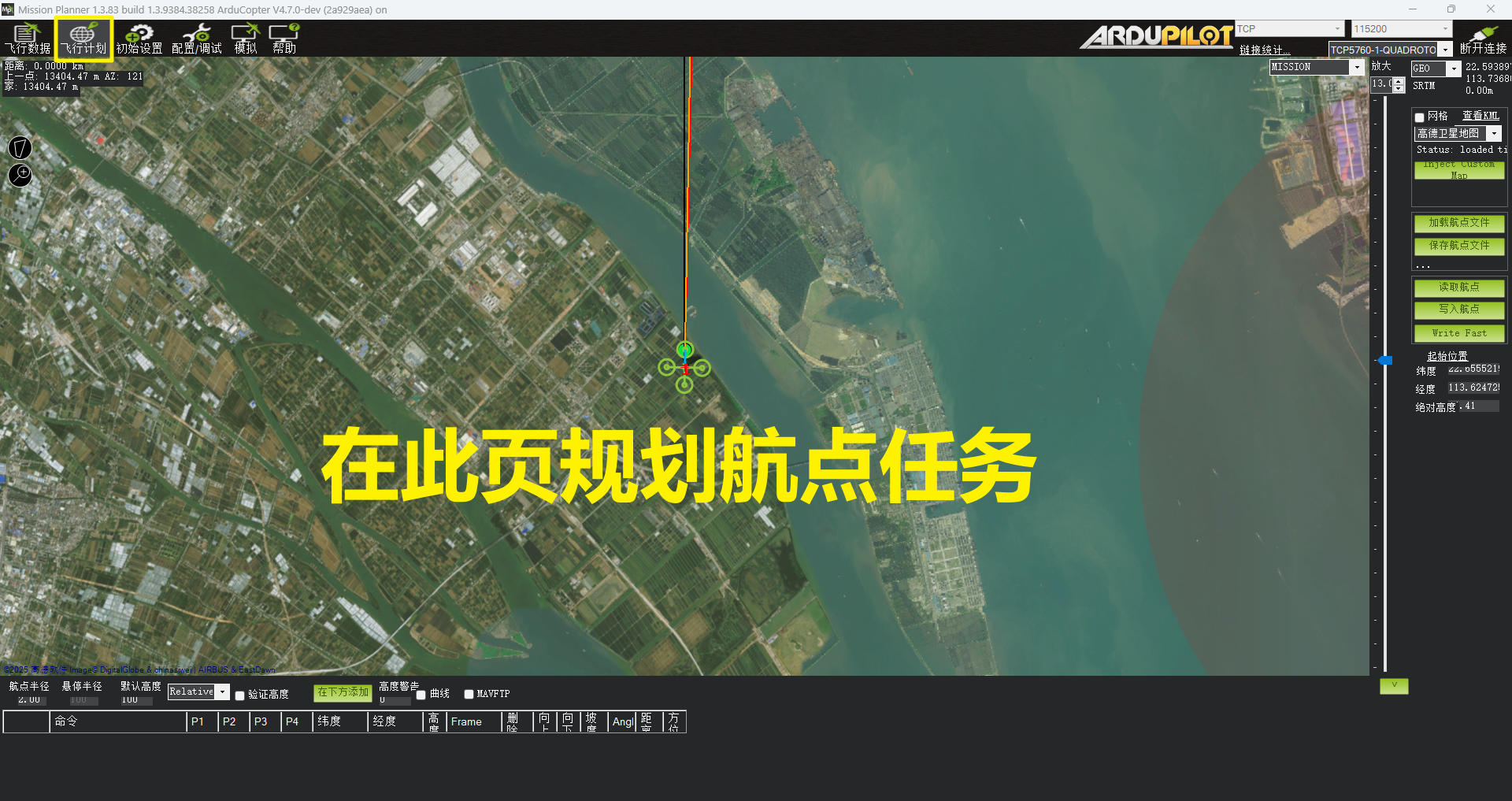
7.2 飞行计划页面
飞行计划页面主要可以进行对地图类型的切换、航点的规划、航线的管理等。
可查看《自动航线教程》的讲解,此处不做赘述!
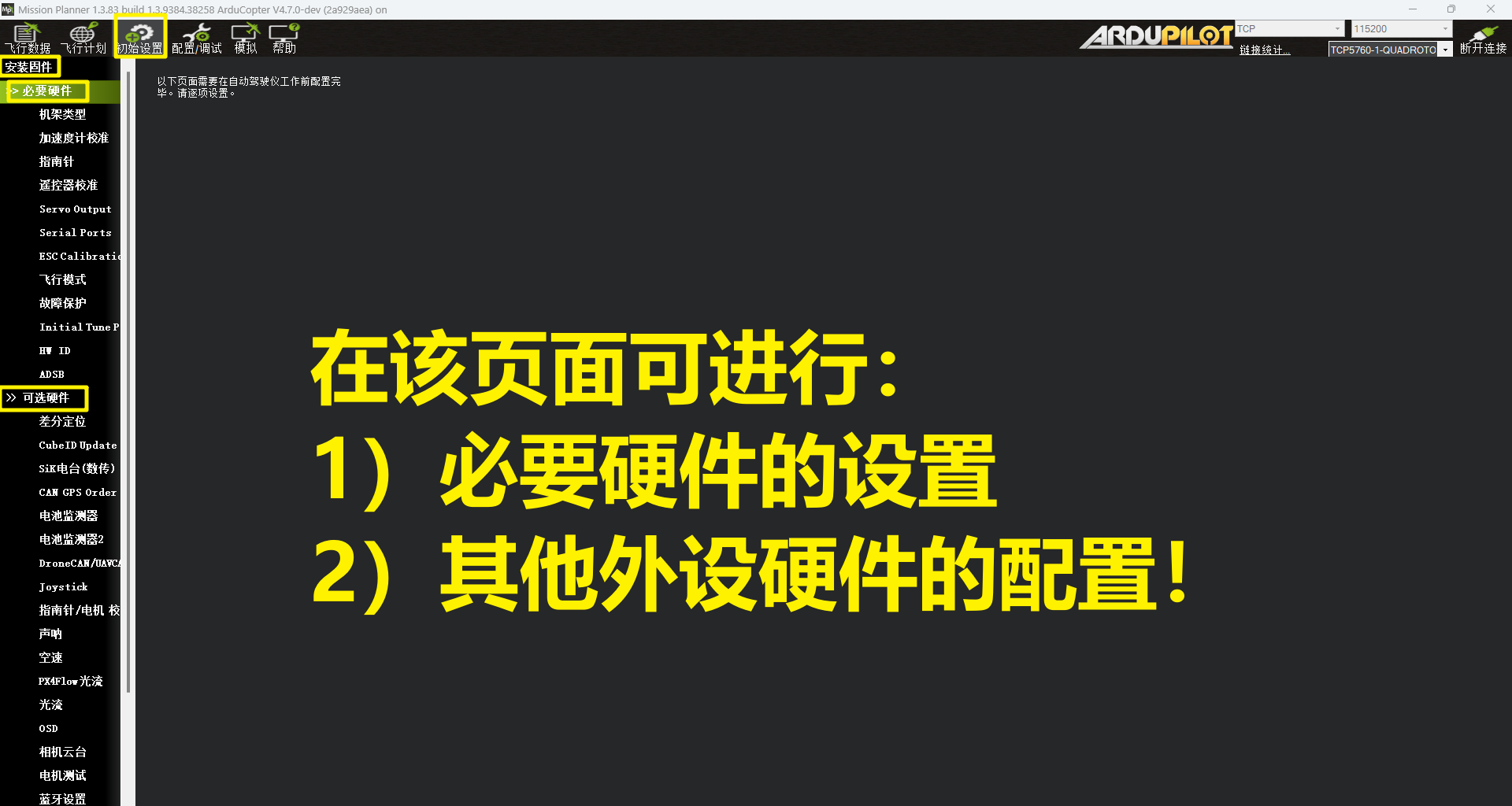
7.3 初始化设置页面
7.4 配置/调试页面
在此页面主要常用的是全部参数表以及扩展PID调参。
全部参数表的相关内容,可查阅《地面站参数搜索、修改、写入》一文,此处不再赘述!

扩展调参详情,可参阅《飞行模式介绍及调参》一文,该文有详细描述,此处也不再赘述!
