知识补充-室内解锁调试、解锁检查参数设置
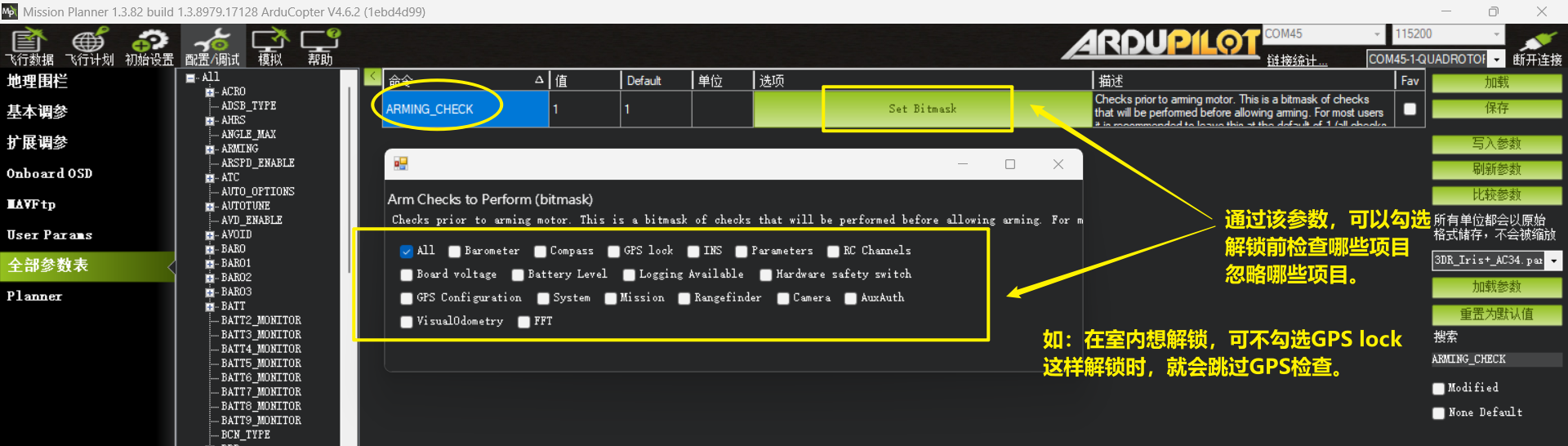
一、如要在室内解锁,可将ARMING_CHECK = 0
由于在室内可能因GPS没有搜到星、罗盘干扰等原因,会导致无法解锁。
当我们装机完成后,想在室内进行解锁,测试电机转向是否正常时,可将参数ARMING_CHECK 改为 =0 (所有传感器状态都不检查)。此时将飞行模式切换到自稳模式(stabilize)模式,即可进行加解锁;
注:ARMING_CHECK这个参数为设置解锁时的检查项,如果某项传感器在解锁时状态检查不通过,则不给用户解锁。
用户可自行勾选检查哪些项目,如下图所示:
注意:
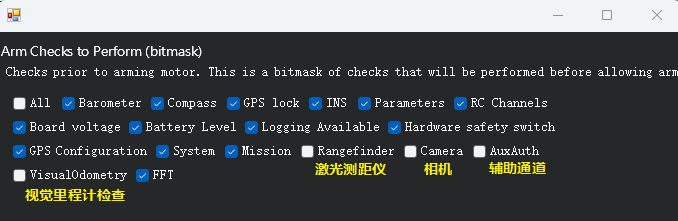
在外场飞行的时候,新手请一定要将ARMING_CHECK =1(全部检查),避免因忽略某些参数导致炸鸡!
对于一些有经验的老手,个人认为以下几个项目是可以不开启的,其余最好都要开启的,如下图所示:
二、如何通过遥控器解锁?
切记!千万不要在室内,给无人机安装螺旋桨!!!
请查阅《解锁与加锁》
三、Missionplanner地面站的消息提示!
对于新手而言,首次配置完成后,兴高采烈的 进行解锁,结果发现遥控器打杆了半天没有反应。
此时用户可使用USB线或无线数传电台连接MP地面站,查看地面站的"消息栏",飞控在上电瞬间会显示基础信息,如下图所示分别是:

解不了锁,需要寻求他人协助时,也最好先截一下这个消息页面的提示,这样别人可以快速定位你的问题!
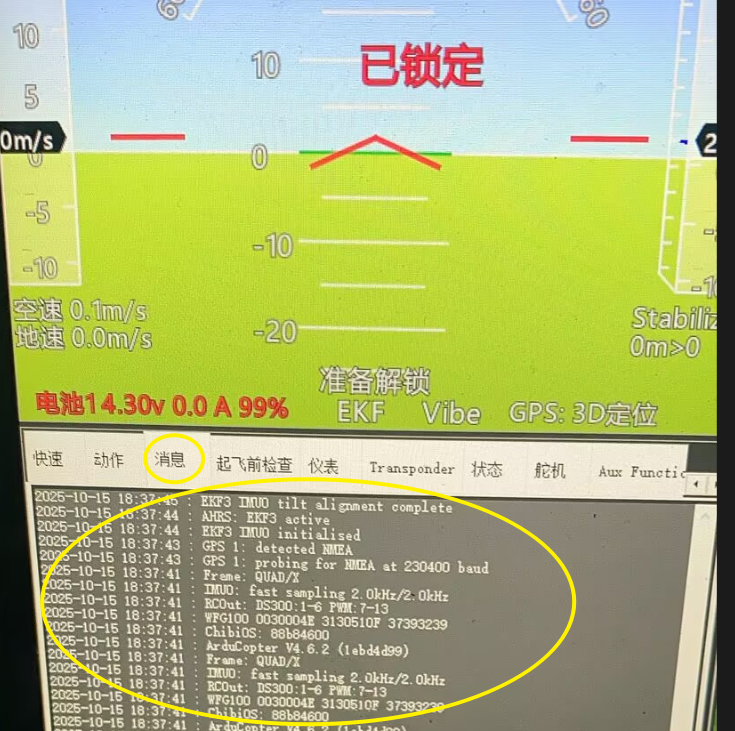
解锁时,点开这个消息栏,如果解锁失败,消息栏会提示解锁失败的原因,虽然是全英文的 ,但是用户可以直接复制粘贴丢到AI中提问即可!
比如下图这里就显示:电池不健康、罗盘没有校准、加速度计需要校准、遥控器信号没有发现!

三、电调协议的参数确认!
如果执行解锁发现,电机不转!请确认电调协议的参数!
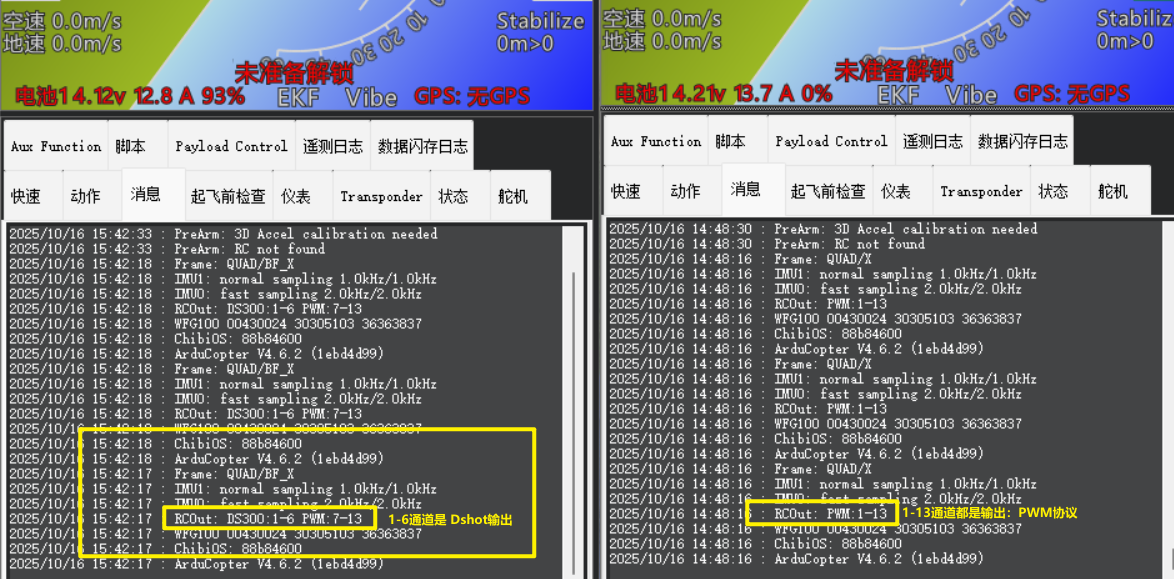
通常在地面站的"消息栏"中,如果的使用的是Dshot协议的电调,无人机上电会打印飞控的输出的PWM协议,那么电机肯定就无法正常响应。
上电时可优先关注消息参数的提示:
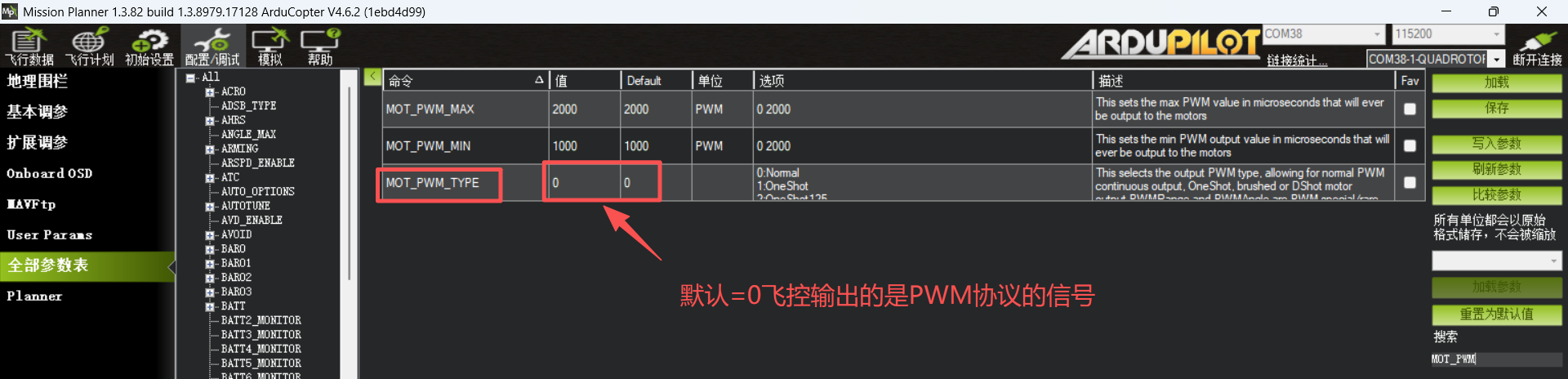
1)如安装的传统的PWM电调(通常是单个的单体),其外观如下图所示,需要将飞控的参数MOT_PWM =0 (默认就是=0)

2)4合一的穿越机电调,其外观如下图所示,飞控需要输出Dshot协议,电机才能正常转动。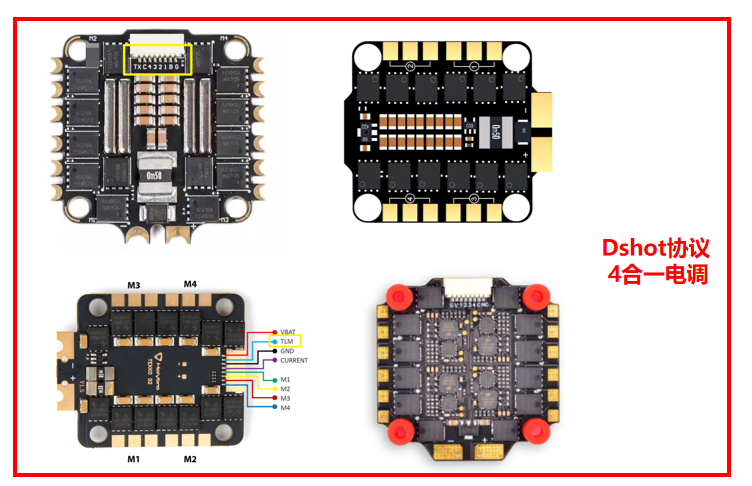
我们需要咨询电调卖家,确认电调默认是什么Dshot多少的协议?(有4种协议可选: Dshot150/Dshot300/Dshot600/Dshot1200)
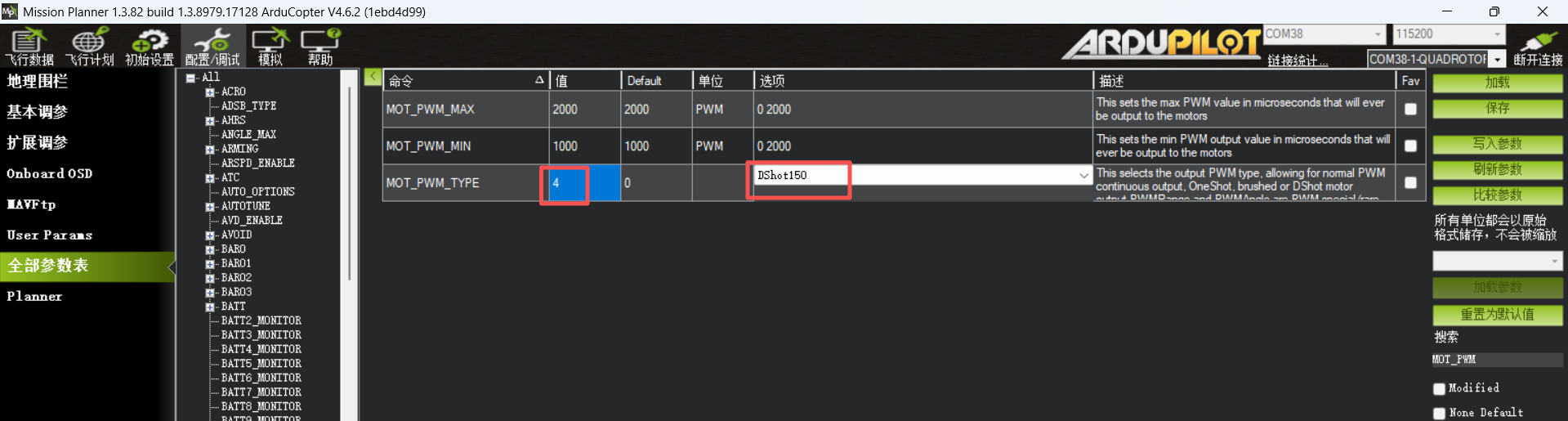
参数MOT_PWM =4(代表Dshot150).
参数MOT_PWM =5(代表Dshot300).
参数MOT_PWM =6(代表Dshot600).
参数MOT_PWM =7(代表Dshot1200).
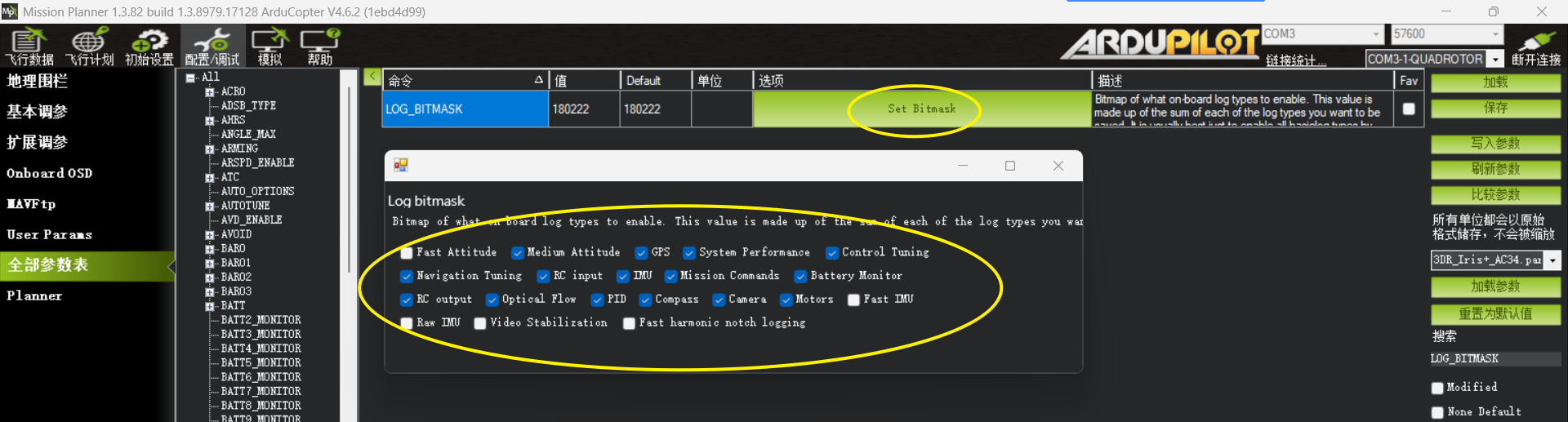
四、配置日志记录系统的参数,便于问题分析!
参数LOG_FILE_DSRMROT (设为1每次上锁后都会生成1个新的日志,默认为0)
参数LOG_DISARMED (默认为0代表解锁后才开始记录日志;设为1代表飞控只要上电了就开始记录日志,但记录的数据量会更大!)
参数LOG_BITMASK (选择需要记录的数据类型,默认即可;用户可按需调节,如果不需要记录某项参数,不勾选即不记录!)