4)解锁与加锁
一、使用遥控器进行加解锁
前提:首先要确认遥控器是否完成了校准,并且遥控器油门遥控与偏航遥控的 相位是正确的 ,详细可以参考以下2个B站视频:
1.1遥控器解锁打杆:
以美国手遥控器为例,将遥控器油门打到最低,YAW航向打到最右,保持3秒以上,如下图所示:

注:使用遥控器时,很大概率会出现无法解锁的的情况,原
1)比如常见的飞控配置,没有设置好(加速度计没有校准、罗盘没有校准等),通过地面站的消息提示栏进行确认。
2)在室内没有搜到卫星,但使用Loiter模式肯定无法解锁。在室内一定使用自稳模式才能解锁。
2)另外在室外使用Loiter模式,卫星信号差,飞控也会拒绝解锁。(如卫星HDOP值大于2.0,该值应该越小越好在0.5-0.8左右最佳)
3)更多原因请连接地面站查看消息栏的提示。
1.2遥控器加锁打杆:
以美国手遥控器为例,将遥控器油门打到最低,YAW航向打到最左,保持3秒以上,如下图所示:
(严禁在空中执行这个动作,否则无人机会空中上从而导致坠落)

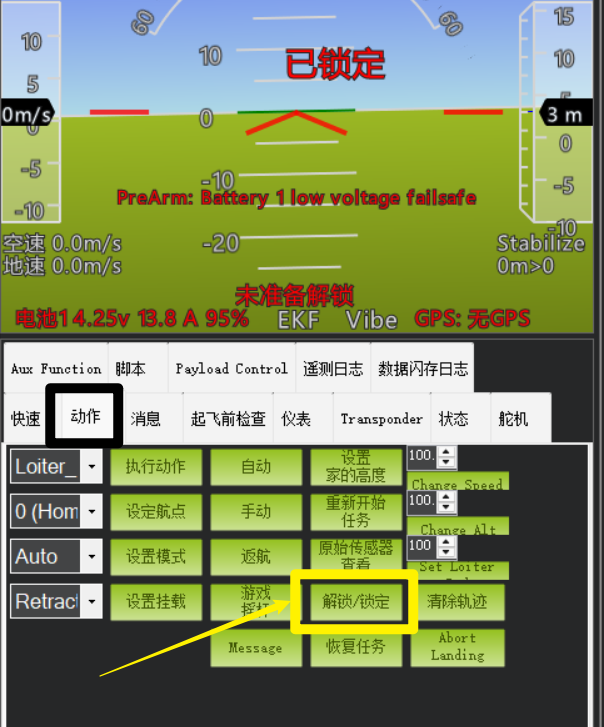
二、使用地面站进行加解锁
在地面站->动作栏-> "解锁/加锁"
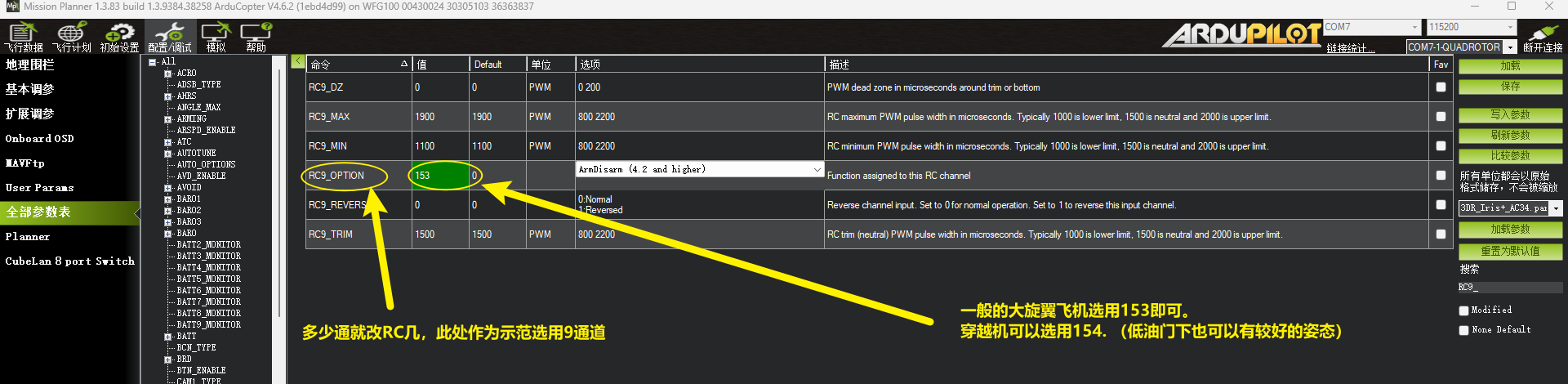
三、使用拨挡开关进行加解锁
根据大家遥控器的通道而定,此处作为演示,选择9通道作为加解锁开关。高位是解锁、低位是加锁!
如果加解锁通道反了,大家可以通过遥控器的通道进行反向。
搜索参数RC9_OPTION将该值设置为154,即可实现拨挡或按键开关进行加解锁!
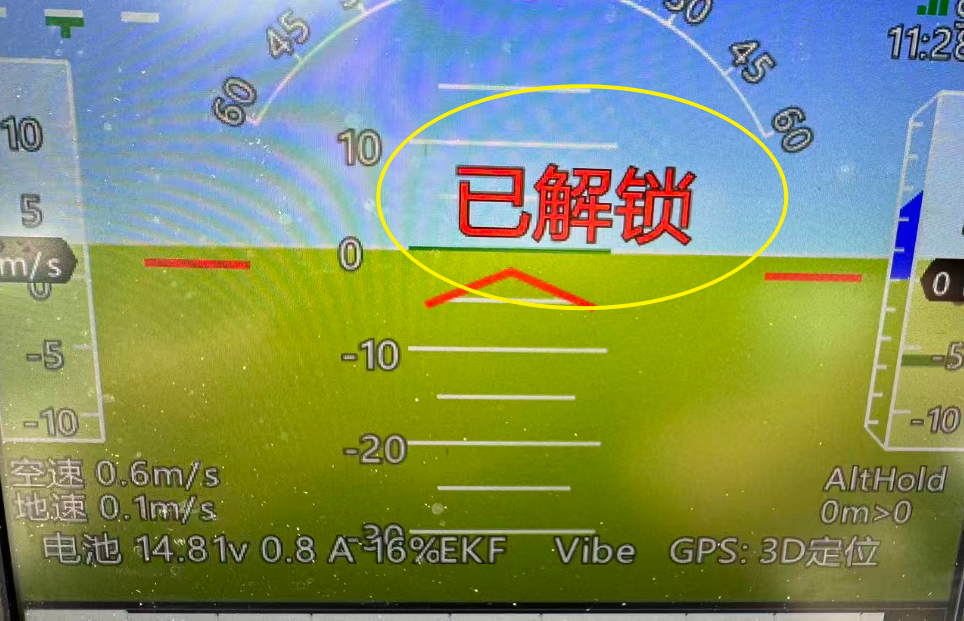
四、解锁后的现象
1)解锁后,飞控板上的一颗LED灯从闪烁状态变为常亮。
2)如果连接了无线数传电台,可在地面站仪表盘看到 “已解锁”
3)APM固件默认在解锁后,电机会怠速转动。用户可以通过参数MOT_SPIN_ARM 设置怠速速度,
设为0则为关闭怠速(不建议)、0.1为默认怠速、0.2为高速怠速。
