2)飞行模式选择、参数调试
一、前言
多旋翼(直升机)4.6版固件,一共有24种内置的飞行模式,其中常用的飞行模式有6种;不同的飞行模式具有不同发飞行特性和功能。

飞行模式可以通过遥控器控制、任务命令也可以通过GCS地面站或伴随电脑来进行控制。
遥控器和地面站都可以同时控制飞行模式,通常以最后一个命令为准。
二、常用飞行模式介绍以及调参
前言(先有个大体脉络):
在调试自稳、定高、定点模式之前,首先要大体理解APM的核心控制理论"串级PID"。
APM的4串PID可以大体理解为:位置控制->速度控制->角度控制->角速率控制;
在loiter模式下,4环控制逻辑中每环的输出,又是下一环的输入;
在控制层面来看: 位置环是外环、姿态环是内环。
在位置控制中,经纬度的输入是外环,速度控制是内环。
在姿态控制中,角度环是外环,角速率环是内环。
PID的调试,都是要从先调内环,再调外环。
因此调PID的顺序,是先调自稳模式、再调定高、定点模式。
在调自稳模式时候,应该先调试内环也就是角速率环,再调角度环,如下图所示:

1、Stabilize增稳模式
概述:
飞手用roll与pitch操作控制飞行器的倾斜角度。 当飞手松开roll与pitch摇杆时,飞行器将会自动水平。
在有风的环境中,飞手需要不断的修正roll与pitch,从而以让无人机定点停留。
飞手用yaw操作控制转向速率。当飞手松开yaw摇杆时,飞行器将会保持它的朝向不变。
飞手的油门输入控制马达的平均转速,这意味着这如果想保持高度,需要不断的修正油门。
油门输入会根据模型的倾斜角度自动调整(比如在模型倾斜过大的时候会自动增大油门),以弥补飞手操作飞行器倾斜所带来的高度变化。
警告:在进行其他模式的飞行之前,熟练掌握自稳模式下的飞行是必不可少的,强烈建议飞手在出现突发情况时能够迅速切回自稳模式以避免事故。
自稳角度限制参数:
ANGLE_MAX,控制自稳模式下的最大倾斜角度,默认为 3000(即 30 度)
自稳模式PID调试原则:
自稳模式主要是姿态控制器在控制,姿态控制器又由内环角速率环和外环角度环所组成。
外环角度环的输入来自于遥控器的摇杆指令,外环角度环的输出是期望角度。
内环角速率环的输入来自姿态控制器外环的输出(期望姿态角),内环角速率环的输出便到电机PWM输出。
因此自稳PID的调试原则是:先内环,再外环。即先调好角速率环参数,再调角度环参数。
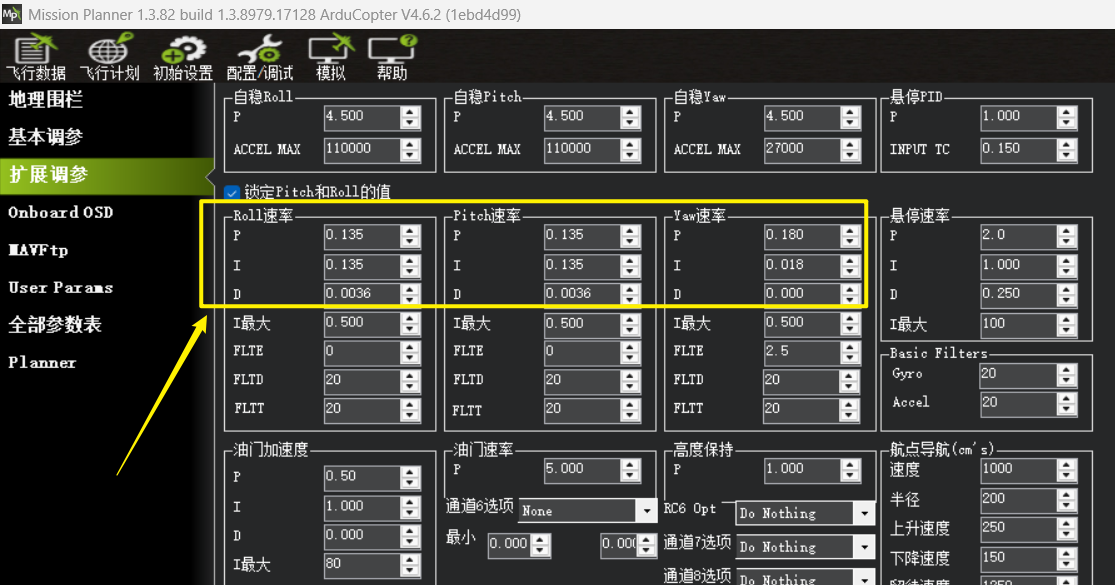
自稳模式感度PID调试(角速率环,姿态控制器的内环):
官方建议是优先使用自动调参功能,如果自动调参不够好,再尝试用手动调试PID参数!
在手动调参之前请确保ATC_THR_MIX_MAN参数和MOT_THST_HOVER参数
一般情况的,默认的 PID参数在无风环境下,基本可以让800g-30kg的无人机顺利起飞,并保持姿态稳定。
默认的 PID参数,F450四轴、5寸-15寸穿越机都能平稳起飞。
假如出现姿态异常的抖动 80%以上都跟控制器参数无关。其中,影响无人机姿态和位置最大的两个因素就是:机械振动和状态估计器异常。
假如排除机械振动和状态估计器引起的问题之后,无人机姿态还是出现振荡,那可以减小角速率环的 P 值和 D 值,I 值设置成和 P 值相等(每次减小的值可为10%-20%),直到振荡消失,要是 P、I、D 值一直减小,飞机姿态控制效果很弱且振荡还没消失,那怎么调整 PID 参数都是没有效果的。
高负载的无人机P值可能低至0.08,低负载的无人机P值可能高达0.18.
自稳模式PD项调试说明:
如果无人机的已经在某个轴上出现了振荡,则首先以 30% 的幅度降低 P、D ,直到稳定,然后再开始手动调整。
假如都无类似上述问题,那么就可以依照下列步骤对角速率换控制器进行调参(先调节横滚和俯仰,再调节偏航):
步骤 | 调试方法 |
|---|---|
1 | 每次增加 30%左右的 D 值,直到出现振荡的现象;【官方建议50%】 |
2 | 每次减小 10%左右的 D 值,直到振荡现象消失; |
3 | 再把 D 值减小 25%。 |
4 | 每次增加 30%左右的 P 值,直到出现振荡的现象;【官方建议50%】 (每次调整 P 值时,把 I 值设置成跟 P 值一样) |
5 | 每次减小 10%左右的 P 值,直到振荡现象消失; |
6 | 再把 P 值减小 25% |
上述调试过程也可通过lua脚本进行自动调参,详情请参阅《lua脚本快速调整》,调参过程如下:
调试过程中,当无人机在出现震荡时,请勿进行大幅度或突然的摇杆操作。
平稳减小油门以使飞机着陆,同时使用非常缓慢且较小的横滚和俯仰操作来控制飞机位置。
自稳模式遥控器的感度PID调试(角度环,姿态控制器的外环):
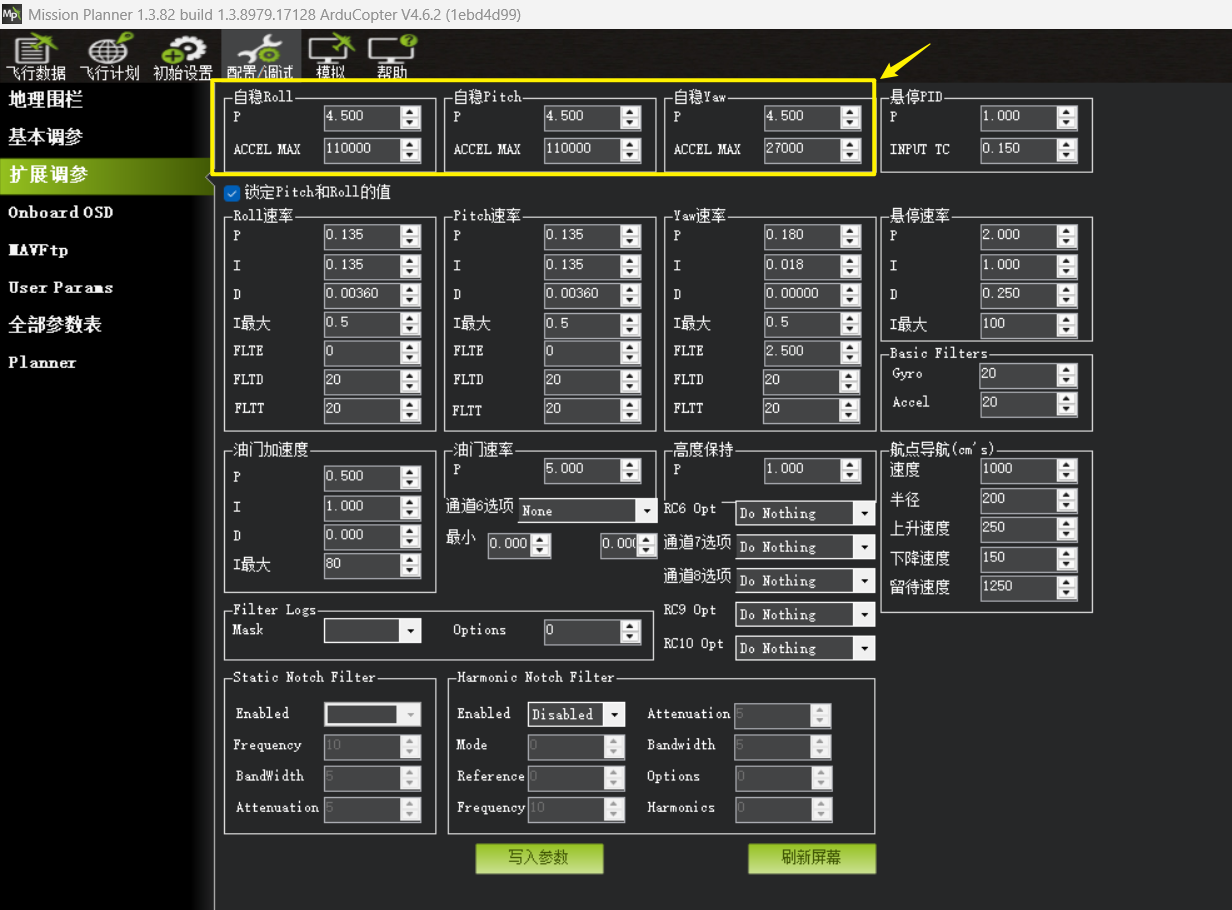
它们在全部参数中分别是:ATC_ANG_RLL_P、ATC_ANG_PIT_P、ATC_ANG_YAW_P默认都i是4.5
自稳模式roll/pitch的P控制飞行器响应输入差值的速度,
自稳Roll/Pitch的P值=7或8,会使飞行器产生更强的反应来抵抗风的影响,但是太高又会产生震荡;
若自稳Roll/Pitch的P值较低,会导致旋转缓慢,可能使抗风能力降低,甚至导致坠机。
自稳3个轴的P默认都是4.5,可以理解为最外环遥控器感度,直接影响打杆的灵敏度。默认P=4.5,其意思是会在1°偏差时以4.5°/s旋转。
飞手使用遥控器操纵时飞行器的响应速度,值越大响应也越快,大的值适合穿越。小的值适合航拍,理论上效率越高的飞行器值越小。
参数ACRO_Y_RATE,值越高,旋转速度越快。默认为202.5°/s,意思是在当摇杆打到最大时,转速为202.5°。
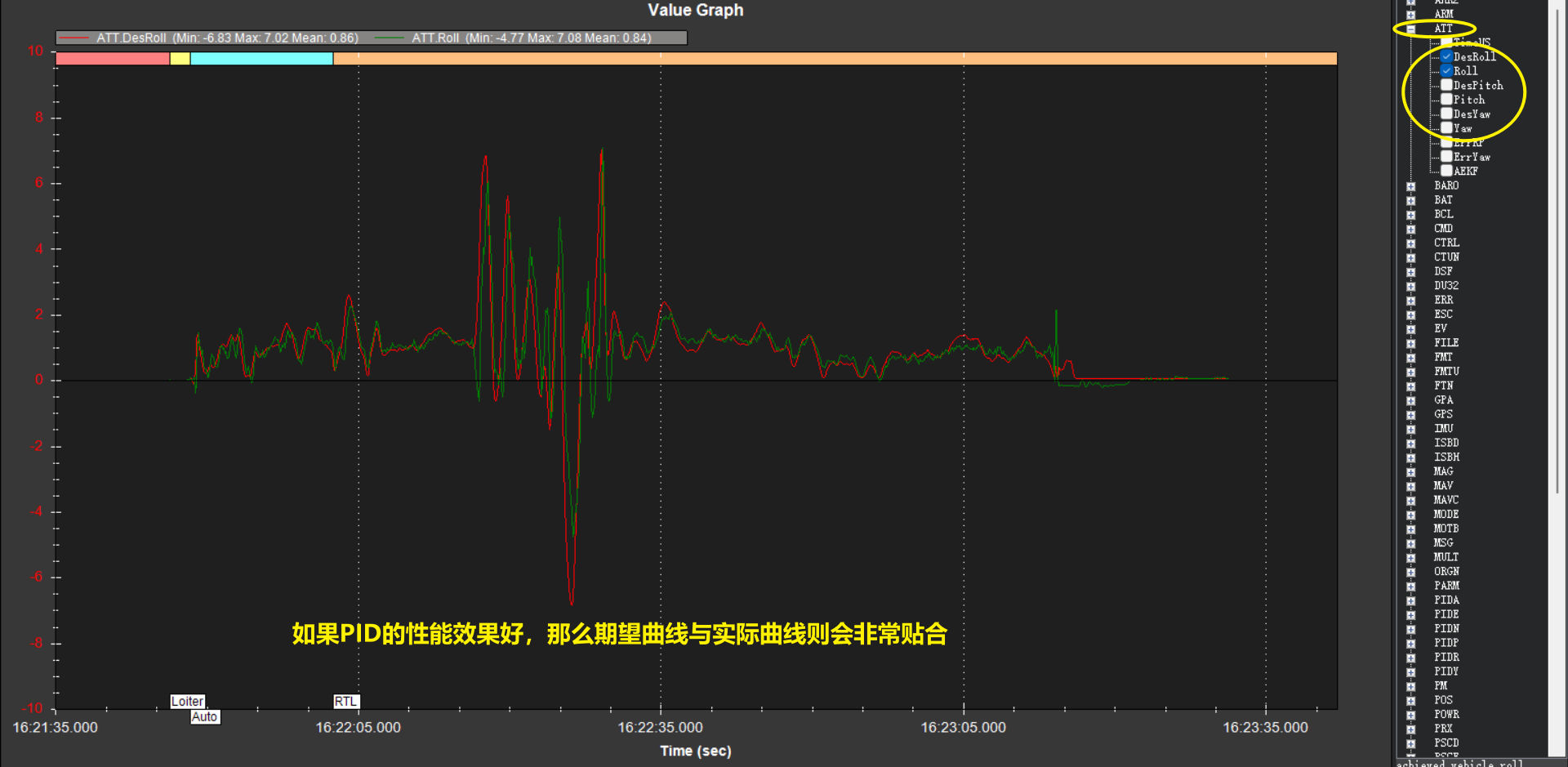
如何通过飞控闪存日志分析自稳PID调试效果?
打开飞控的闪存日志,查看日志参数ATT:
其中DesRoll、DesPitch、DesYaw分别是期望角度;Roll、Pitch、Yaw分别是实际角度。
如果自稳PID的调试效果好,那么期望值曲线与实际值曲线将会非常贴合!
调试自稳模式中可能会遇到的问题:
新飞行器起飞时马上翻掉,这通常是由于电机顺序不对或者桨不对;
飞行器绕roll/pitch轴摇摆,这通常表示 Rate P不对
飞行器下降较快时摇摆,这是由于桨的自洗导致,这不太可能调整好,但是提高Rate Roll/Pitch P可能会有帮助;
飞行器起飞时左或者右转15°,这是由于一些电机可能不是线性的或者ESC没有校准好;
即使在无风环境下,飞行器也偏向于向一方飞行,飞控没有水平,可以尝试重新校准加速度计,或者通过参数AHRS_TRIM_X与参数AHRS_TRIM_Y来进行调节。横滚配平为AHRS_TRIM_X,俯仰配平为AHRS_TRIM_Y。这两个值均以弧度为单位,左滚和前俯仰为负数。
飞行器高度保持不好,这是由于自稳模式是手动模式,需要控好油门摇杆来控制稳定;
飞行过程中突然弹跳,这可能是电机或者ESC的机械故障;
2、Alt Hold定高模式
在高度保持模式下,无人机会保持恒定的高度,并且油门打杆时飞行动作会比较缓慢,同时允许正常控制横滚、俯仰和偏航。
飞行员可以通过油门杆控制飞行器的爬升或下降速度。
如果油门杆处于中间(40%~60%),飞行器将保持当前高度。
死区的大小可以通过参数THR_DZ进行调整。该参数的值应介于“0”到“400”之间,其中“0”表示无死区,“100”表示在油门中点上下各 10% 的位置为油门死区(即死区范围从油门杆位置的 40% ~ 60%)。
在油门中位盲区之外(即低于 40% 或高于 60%),飞行器将根据摇杆杆量来控制下降或爬升。默认的 升降速度为2.5m/s。当摇杆完全向下时,飞行器将以 2.5 米/秒的速度下降(无人机不会直接摔下来);当摇杆完全向下时,飞行器将以 2.5 米/秒的速度爬升。这些速度可以通过参数PILOT_SPEED_UP(上升速度)、参数PILOT_SPEED_DN(下降速度),用于确定这些速度的加速度由参数PILOT_ACCEL_Z决定。(如果在定高模式下,发现上升与下降速度非常不缓慢,可以厂商增大PILOT_ACCEL_Z进行解决)
参数调试:

高度保持P(参数为PSC_POSZ_P)用于转换高度误差(期望高度和实际高度)至想要上升或下降的比率。P值越大,定高能力越强,但如果设置得太高会导致油门不稳定。
PSC_POSZ_P的调试:
PSC_POSZ_P是垂直位置控制器的比例增益(P增益),用于调节飞行器高度控制的响应速度和稳定性。
其核心作用是:将期望高度与实际高度的差值转换为爬升或下降速率,进而传递给油门速率控制器。
调高增益可增强对高度偏差的响应,但过高会导致振荡。
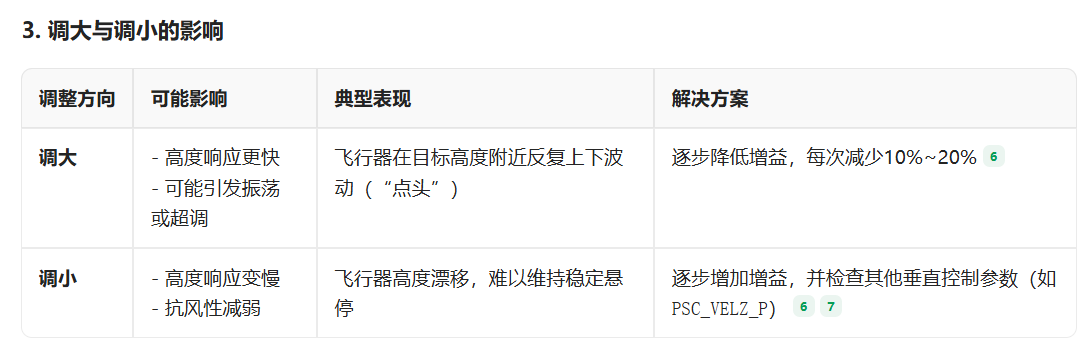
悬停测试:
在AltHold模式下悬停,观察高度是否稳定。
若高度持续上下波动(如“点头”现象),需降低
PSC_POSZ_P。若高度响应迟钝(如缓慢漂移),可适当增加此值
动态测试:
手动快速推拉油门,观察高度变化的跟随性。
若出现超调或震荡,需减小增益;若响应迟缓,则增大增益。
联动测试:
与PSC_VELZ_P配合:垂直速度控制器的P增益需同步调整。例如,若PSC_POSZ_P降低,PSC_VELZ_P也可能需要相应减小
与PSC_ACCZ_P配合:垂直加速度控制器的P增益影响最终推力输出,需确保三者协调
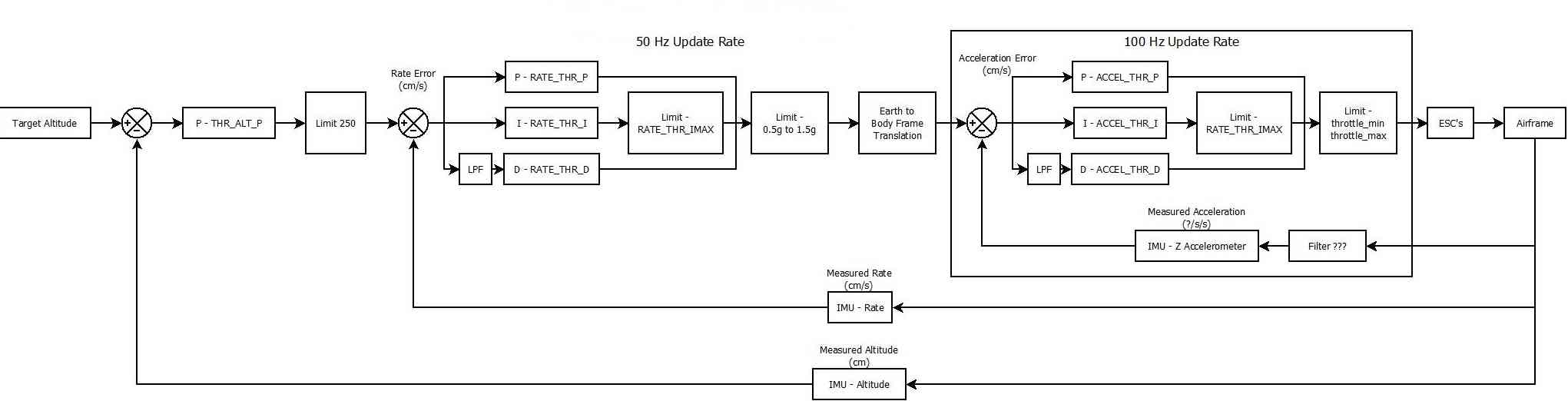
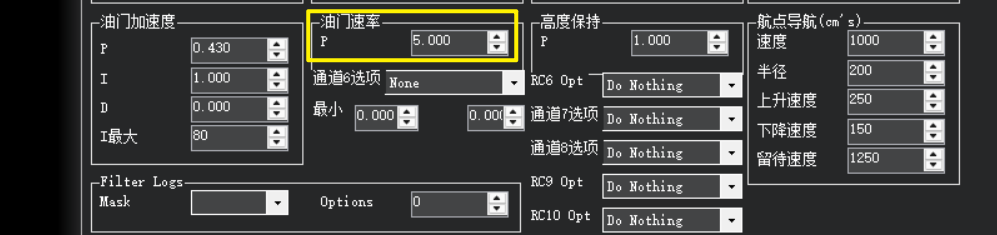
油门速率(通常不用修改),用于将所需的爬升或下降速率,转换为所需的向上或向下加速度。
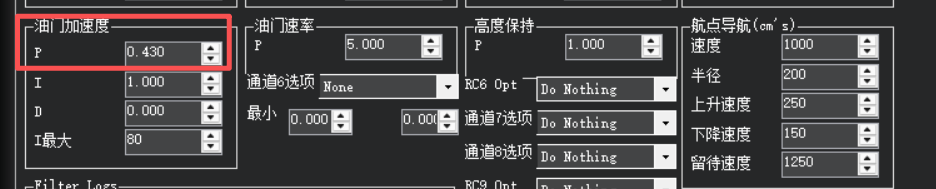
油门加速度(通常这些值不应该增加),用于将加速度偏差转化到电机输出。如果修改P和I的值, 应该保持 P : I = 1 : 2(I值是P值的两倍)。对于非常强大飞行器都减小50%,可能会获得更好的响应(即P值为0.5,I值为1)。
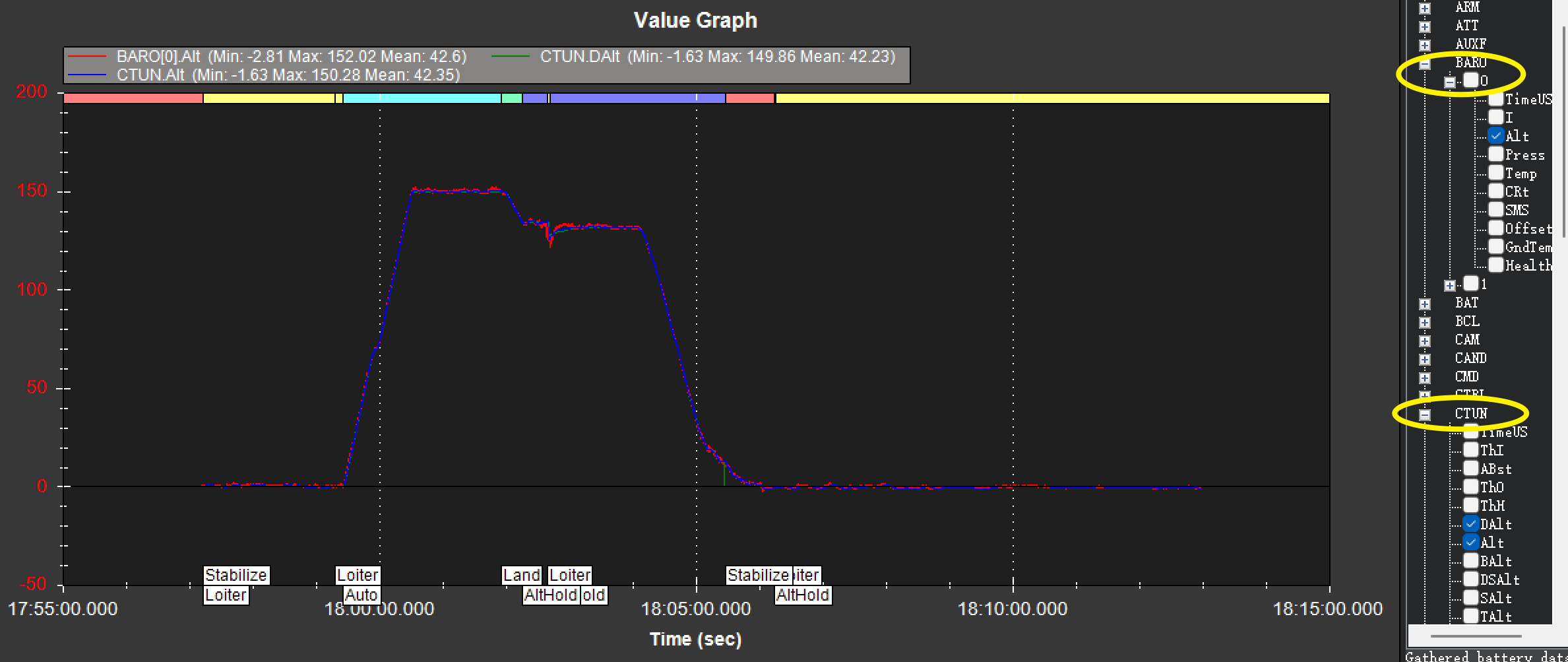
如何通过飞控闪存日志分析定高效果?
下载日志,比较气压计的原始高度(BARO.Alt)、高度控制器的目标值(CTUN.DAlt)、状态估计器融合后高度(CTUN.Alt),如果三个参数的曲线基本保持一致,那么其定高效果比较良好。
常见问题:
一旦启用高度保持功能,剧烈的振动会导致直升机快速爬升。 有关如何测量和减少振动,请查看分析飞控震动值章节。
直升机缓慢下降或爬升,直到飞行员重新控制稳定器。这通常是由于油门杆未处于中间位置造成的。这种情况通常发生在飞行员从手动飞行模式(例如稳定模式)切换到高度保持模式时,而直升机并未在油门杆中间位置悬停。请参阅悬停油门中立值设置章节。
高度保持模式刚启用时,电机似乎会短暂停止,但很快又恢复正常。这种情况通常发生在飞行员快速爬升时进入高度保持模式。目标高度是在飞行员切换到高度保持模式时设定的,但由于飞行器快速上升,它飞到了目标高度之上。此时,激进的高度保持控制器会立即将电机转速降至接近最小值,直到飞行器开始回落至目标高度。解决方法是在飞行器处于稳定高度时进入高度保持模式。
气压变化会导致飞行器在较长时间内上下漂移几米,或者导致 GCS 上显示的高度不准确几米,包括偶尔出现负高度(即低于本地高度的高度)。
直升机高速前飞后平飞时,高度会瞬间下降 1 米至 2 米。这是由空气动力学效应引起的,该效应会导致直升机顶部安装自动驾驶仪的位置形成一个瞬间低压气泡,从而使高度保持控制器误以为直升机正在爬升,从而做出下降响应。目前尚无此问题的解决方法。
当飞行器接近地面或着陆时,高度保持会变得不稳定。这可能是由于气压计受到螺旋桨洗流引起的压力变化的影响。解决方案是将自动驾驶仪移出螺旋桨洗流的影响范围,或将其置于通风良好的封闭空间内。
由于光线照射气压计而导致高度突然变化。
3、Loiter悬停停模式(需卫星定位)
概述:
Loiter悬停模式打开后,飞行器会自动保持当前位置、方向和高度。GPS定位、 罗盘干扰 、 振动都会直接影响一个悬停效果。
如何控制?
操控者使用 遥控器 控制杆,控制飞行器水平位置和垂直高度。
水平位置可以用Roll和Pitch控制杆调节,当飞手放开摇杆,飞行器会缓慢降速,直到停止。同
定高模式 一样,通过油门杆控制高度,通过Yaw控制杆控制方向。
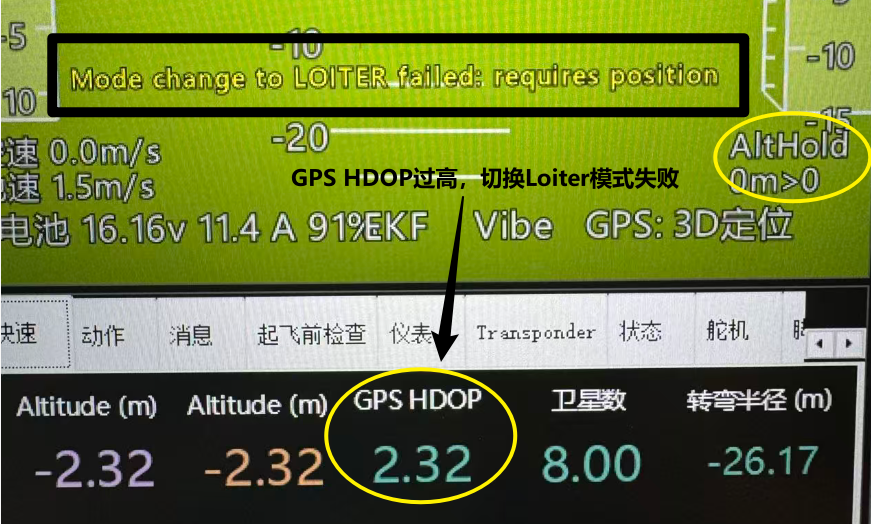
在Ardupilot3.1(或更高版本),当GPS 3D锁定状态或HDOP降到2.0或更低,才可成功切换到Loiter模式,否则无法成功切换到Loiter模式,并提示切换失败,需要位置信息,如下图所示:
如何调试?
Loiter相关的参数,可通过missionplaner的全部参数中,搜索 “LOIT_” 相关的参数,如下:
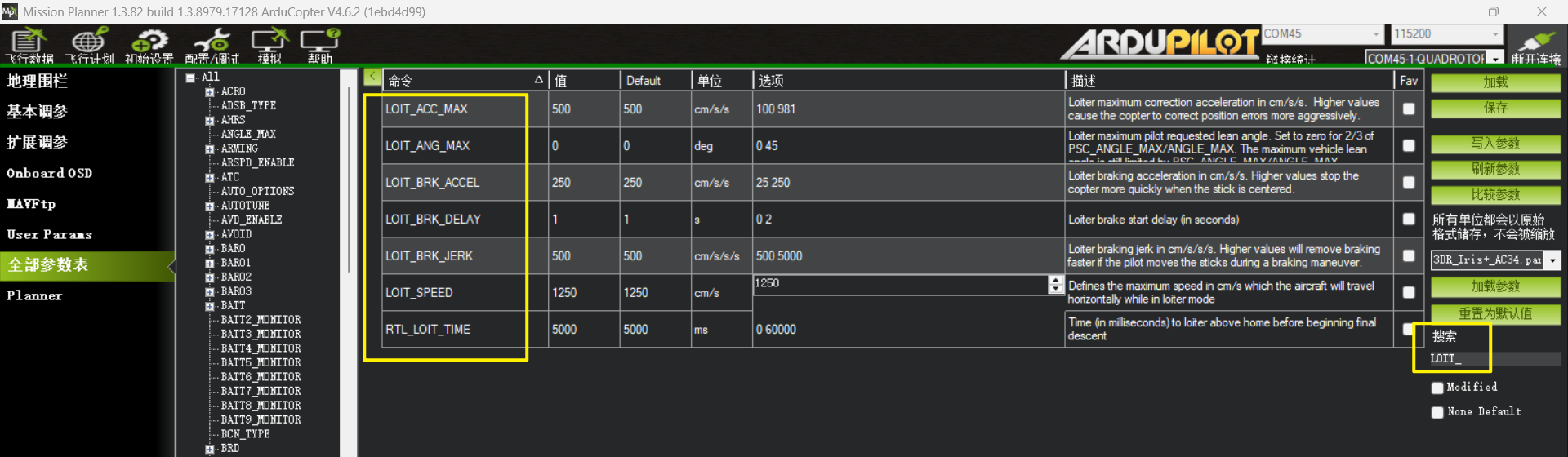
LOIT_SPEED ,默认为1250cm/s,loiter模式下允许的最大飞行速度。
LOIT_ANG_MAX,默认为0°,如果将该值设置为0,那么loiter模式下允许的最大倾斜角度是ANGLE_MAX的2/3。
RTL_LOIT_TIME,默认为5000ms,该值设置无人机返航到头顶时的悬停时间。
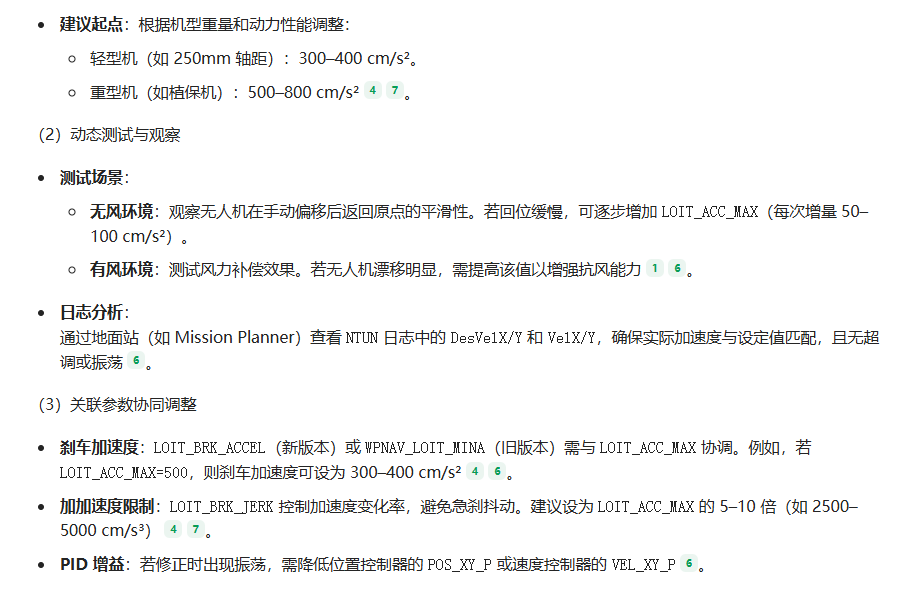
LOIT_ACC_MAX,默认为500 cm/s²,控制无人机在悬停(Loiter)模式下为纠正位置误差(如风力扰动或操控偏移)所能施加的最大水平加速度。值越大,无人机修正位置的速度越快,但可能引发振荡或动力过载。
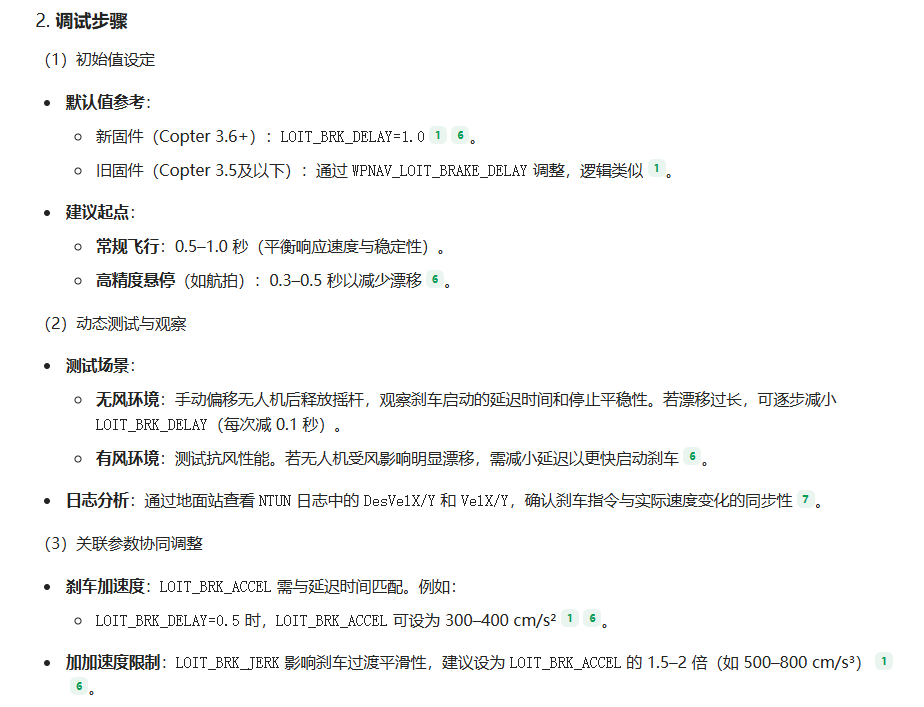
LOIT_BRK_ACCEL,默认为250cm/s²,控制无人机在悬停(Loiter)模式下,当遥控器摇杆回中时的刹车加速度。值越大,无人机停止得越快,但可能导致急停抖动或动力过载,需与
LOIT_ACC_MAX(最大修正加速度)协同调整。
LOIT_BRK_JERK,默认为500cm/s²,控制无人机在悬停模式下刹车时,若飞行员突然操作摇杆,系统从刹车状态切换到跟随指令的速率。值越大,无人机响应越快,但可能导致急停抖动;值越小,刹车更平缓但响应延迟。需与
LOIT_BRK_ACCEL(刹车加速度)协同调整。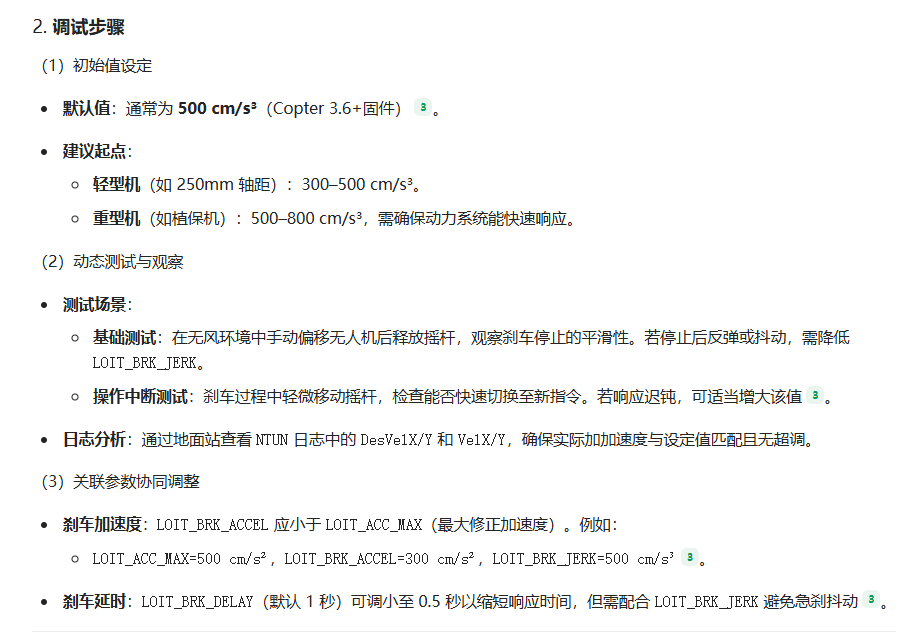
LOIT_BRK_DELAY, 默认为1s,控制无人机在悬停模式下,当遥控器摇杆回中后,刹车动作的启动延迟时间。值越小,刹车响应越快;值越大,刹车越平缓但可能增加漂移距离。
/****************************以下为Loiter模式的位置控制器外环PID调参*************************/
Loiter模式的位置控制器外环PID主要由以下2个参数控制:
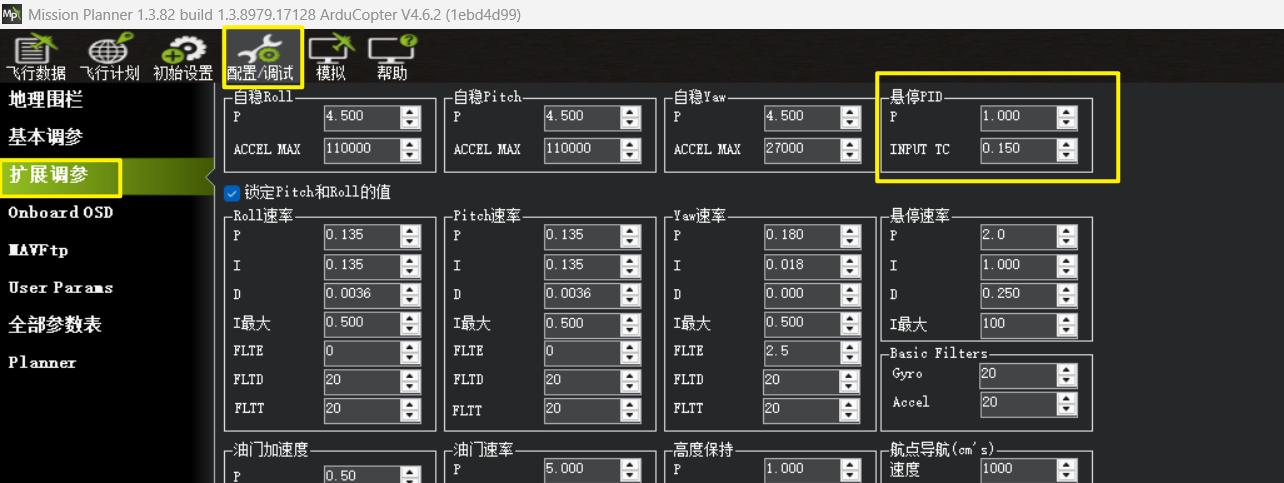
PSC_POSXY_P,Loiter悬停模式的PID的P值,默认值是1,(位置控制器的P,将输入的经纬度转为所需的速度,传递给速度控制器,属于位置控制的外环)该值是位置控制环的比例增益,用于将目标位置与当前位置的水平距离误差(纬度方向)转换为期望速度,进而传递给悬停模式下的速率控制器。值越大,修正位置误差的速度越快,但可能导致超调或振荡;值越小,响应越平缓,但可能导致修正延迟。
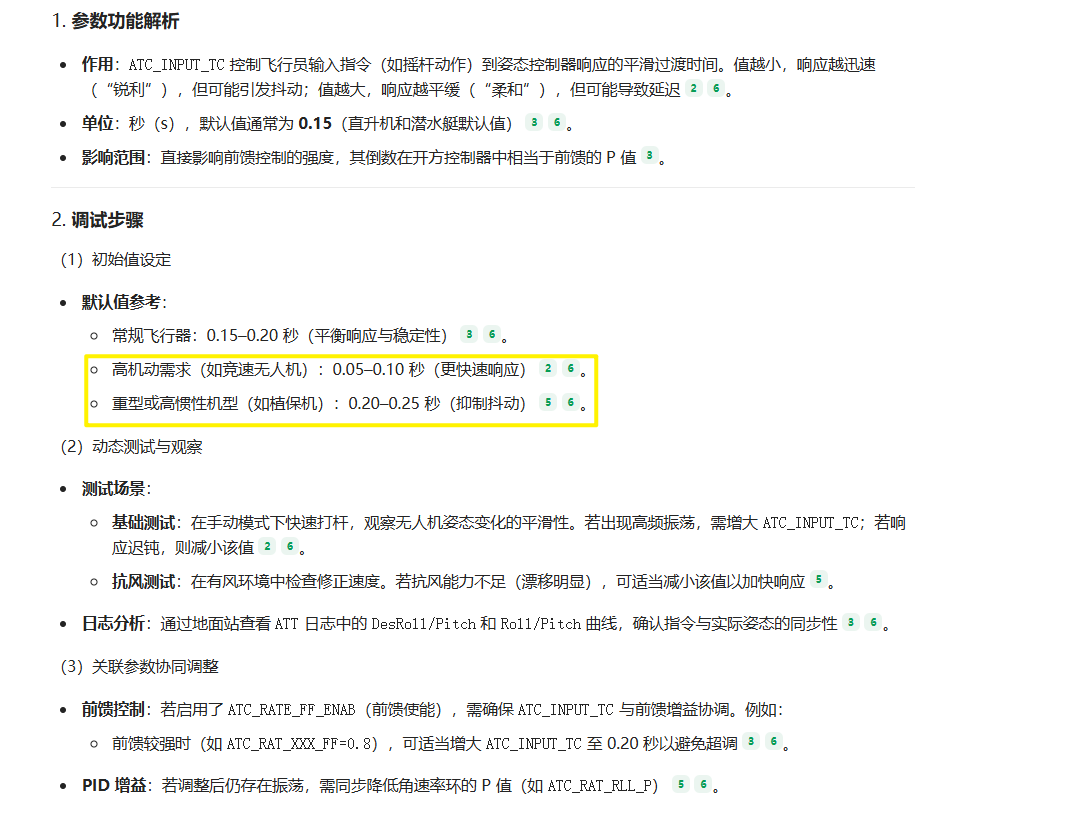
ATC_INPUT_TC,默认是0.15,控制飞行员输入指令(如摇杆动作)到姿态控制器响应的平滑过渡时间。值越小,响应越迅速(“锐利”),但可能引发抖动;值越大,响应越平缓(“柔和”),但可能导致延迟。
上述两个 参考在地面站的扩展调参中,直接进行数值修改,如下图所示:
/****************************以上为Loiter模式的位置控制器外环PID调参*************************/
/*************************以下为Loiter模式的位置控制器内环PID调参***********************/

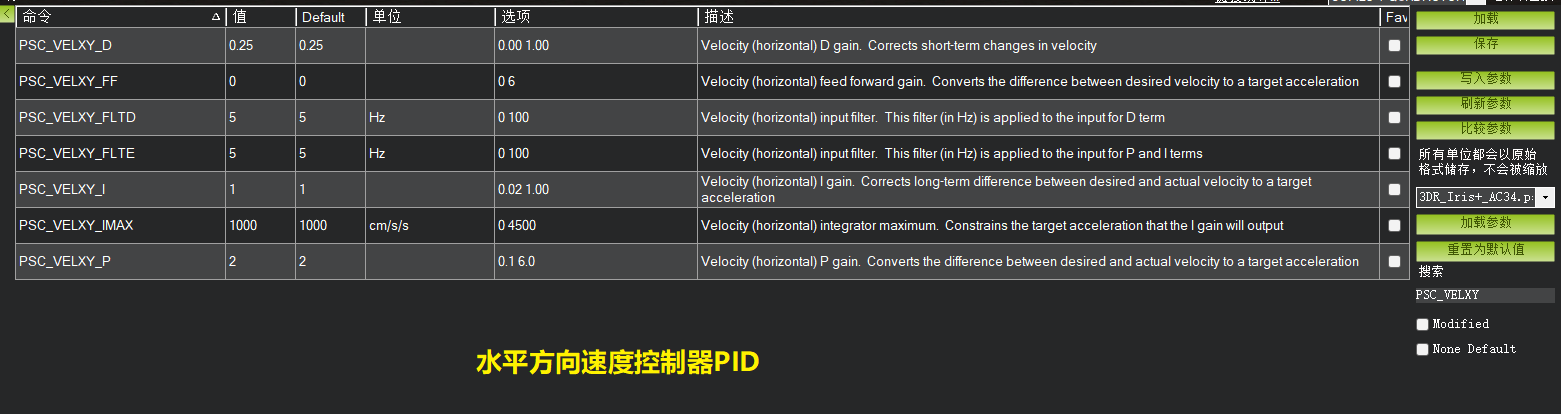
PSC_VELXY_开头的参数属于水平方向速度控制器PID参数,对应扩展调参中的悬停速率!
PSC_VELZ_开头的参数属于垂直方向速度控制器的PID参数。
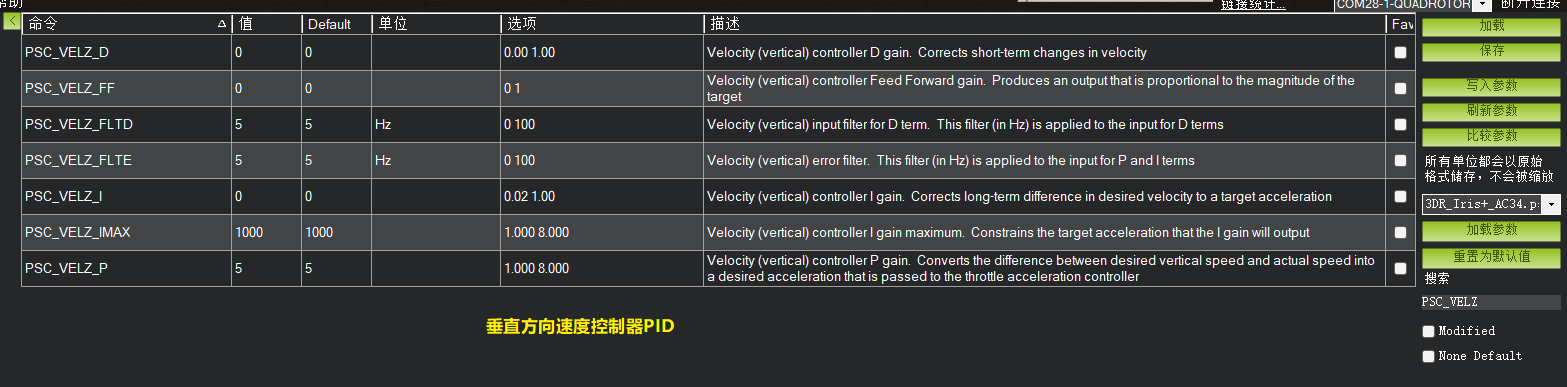
上述两个方向的速度控制器,是负责将速度误差(期望速度与实际速度之间的差距)转换为目标加速度,属于位置控制环的内环控制。在获得目标加速度后,飞控的控制系统又会将目标加速度传递给姿态控制器的外环,外环将目标加速度转换成飞行器的期望角度,期望角度又会被姿态控制器的内环转换成角速度率。
APM的核心控制层"串级PID",在loiter模式下,其4环控制逻辑中每一环的输出,又是下一环的输入,如下:位置控制->速度控制->角度控制->角速率控制
PSC_VELXY_P,默认是2,比例增益,将速度误差转换为目标加速度。值越大响应越快,但可能引发超调或振荡。调试:手动打杆观察速度跟踪延迟。若响应慢,每次增加 0.2;若超调,则减小 0.1。
通过日志分析,查看跟随效果。
PSC_VELXY_I,默认是1,积分增益,消除长期速度误差(如持续风力偏移)。值过大会导致积分饱和,引发震荡。调试:在有风环境中观察抗漂移能力。若长期漂移明显,每次增加 0.02;若震荡则减小。
PSC_VELXY_D,默认是0.25,微分增益,抑制速度短期波动(如突风扰动)。值过高会放大传感器噪声。调试:快速打杆后释放,观察刹车抖动。若高频振荡,每次减小 0.005 或降低FLTD。
PSC_VELXY_IMAX,默认是1000,积分输出上限,限制积分项的最大加速度,防止积分饱和(如设为 500 cm/s² 时,积分输出不超过此值)。一般无需调整此参数
PSC_VELXY_FF,默认=0(未开启),前馈增益(类似于提前打杆):将期望速度直接转换为加速度指令,绕过PID闭环调节,提升响应速度。值越高,跟踪指令越“激进”,但可能引发超调。
调试:
响应测试:手动快速打杆,观察速度跟踪延迟。若延迟明显,逐步增加 FF(每次 0.1);若超调或振荡,则减小 FF。
抗风测试:提高 FF 可增强抗风能力,但需配合 FLTD 抑制高频抖动
1)常规轻型机如果要开启前馈,可尝试先设置为0.8,同时需要结合滤波器一起使用,例如:PSC_VELXY_FF=0.8, PSC_VELXY_FLTE=8Hz, PSC_VELXY_FLTD=4Hz
2)重型机或者高噪声机(植保机),可先设置为0.5,同时需要结合滤波器一起使用,例如:FF=0.5, FLTE=5Hz, FLTD=2Hz
PSC_VELXY_FLTE,默认是5Hz(在条件允许的范围内,越高越好!),P/I项输入滤波器:平滑速度误差信号,抑制高频噪声对比例和积分项的影响。截止频率越高,响应越快,但噪声敏感度增加。负责稳态误差修正和长期跟踪,需要较高的截止频率(FLTE)以保证响应速度。若 FLTE 过低,会导致修正延迟,尤其在抗风或快速机动时表现不佳。
PSC_VELXY_FLTD,默认是5Hz(在条件允许的范围内,越低越好!),D项输入滤波器:专门过滤速度微分信号,避免高频噪声被微分放大导致抖动。截止频率通常低于FLTE。微分(D)项对高频噪声敏感,过高的 FLTD 会放大传感器噪声(如陀螺仪振动),引发机身抖动。因此需更严格的滤波。
FLTE:若响应迟钝,每次提高 2Hz;若噪声明显,降低 1Hz。
FLTD:优先调整(如从 5Hz→3Hz)以抑制D项噪声,再微调FLTE。
振荡抑制:若悬停时高频抖动明显,优先降低
FLTD(如从 5Hz 降至 3Hz),其次调整FLTE。延迟检查:若速度修正迟钝,逐步提高
FLTE(每次 2Hz),同时监测噪声。FLTE平滑整体速度误差信号,而FLTD专门处理微分信号的噪声。通常
FLTE的截止频率应高于FLTD(通常是2:1,例如FLTE=10Hz,FLTD=5Hz),以确保比例/积分项响应更快,同时避免微分项噪声干扰FLTE与FLTD与PID增益之间的关系:若
PSC_VELXY_P较高(如 1.5 以上),需搭配较低的FLTE(如 8Hz)以避免超调;若PSC_VELXY_D较高(如 0.05 以上),需降低FLTD(如 3Hz)防止噪声放大。当使用 RTK GPS 或光流模块时,可适当提高
FLTE和FLTD(如 12Hz/6Hz),利用高精度数据减少滤波需求。
联动调参:整体调参优先级:调试时建议按 P→FF→I→D→滤波器 顺序逐步优化
PID协同:先调 P 至响应无延迟,再增加 I 消除静差,最后用 D 抑制超调。
前馈与闭环平衡:高前馈(FF=1.0)时,需降低 P(如 0.8)避免指令冲突
滤波器与增益匹配:高 FLTE(10Hz)需搭配高 P(1.2);低 FLTD(2Hz)需降低 D(0.01)
/***********************以上为Loiter模式的位置控制器内环PID调参***********************/
如何通过飞控闪存日志分析定点效果?
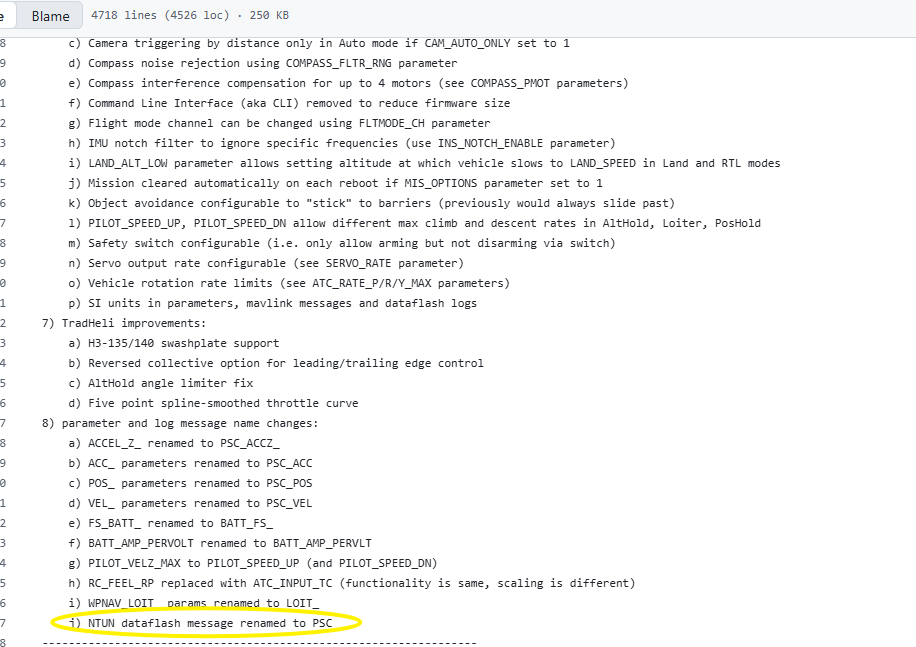
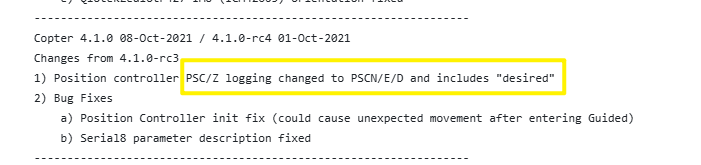
Ardupilot的官方wiki上没有及时更新,wiki显示通过查看NTUN 日志中的 VelX/Y,但实际日志已无上述参数,通过查看更新记录可知日志中的NTUN已修改了2次:
日志分析:
关键是分析PSCE.DVE VS PSCE.VE(东西方向的期望速度与实际速度)
PSCN.DVN VS PSCN.VN(南北方向的期望速度与实际速度)
上述实际与期望曲线,越贴合,则代表定点效果越佳!
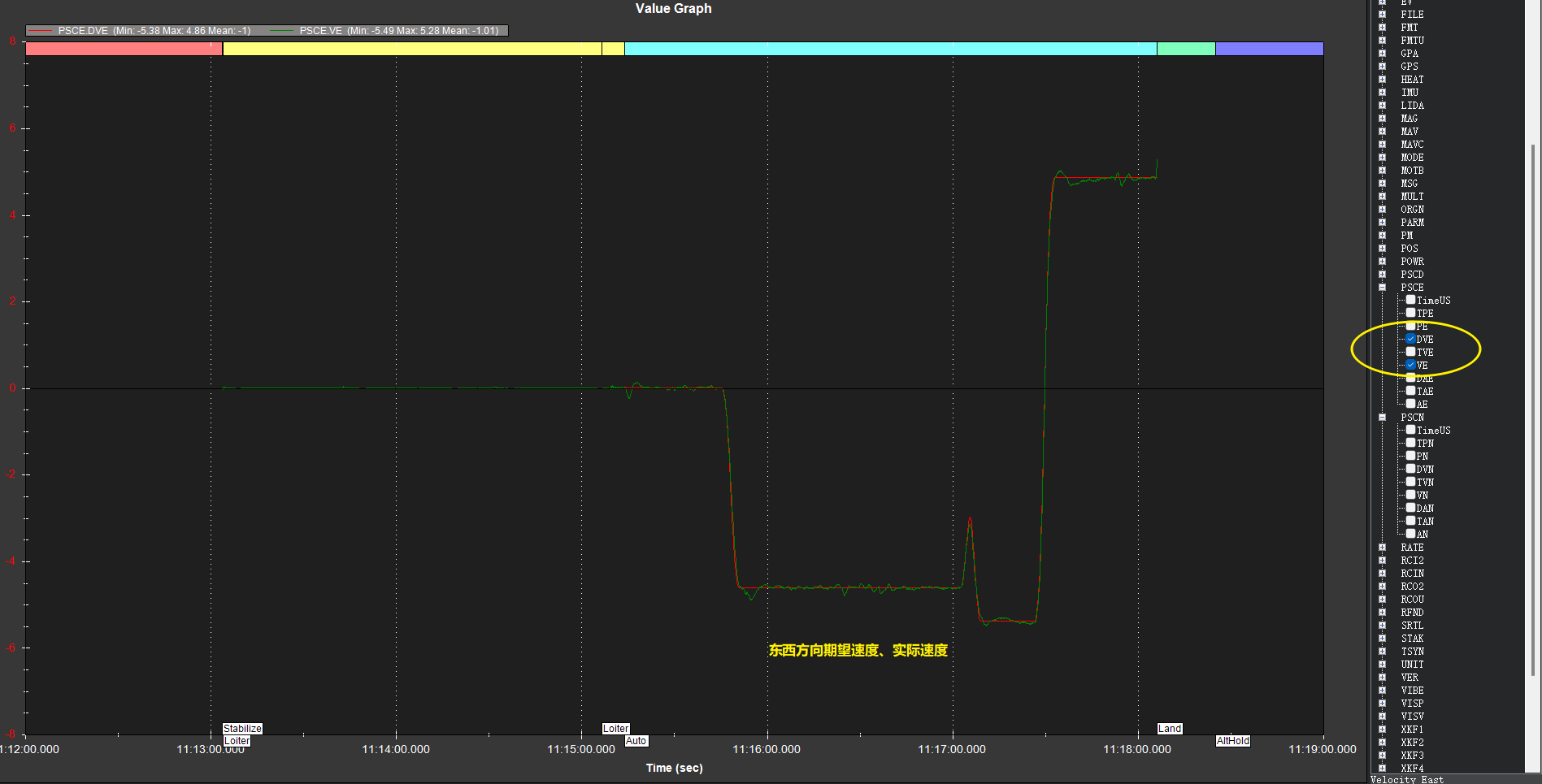

目前Loiter模式的相关日志参数,通过以下3个参数进行记录:
PSCE: 东西方向控制PSCN: 南北方向控制PSCD: 垂直方向控制(高度)
上述参数分别记录了期望位置与实际位置、期望速度与实际速度、期望加速度与实际加速度。
注:日志分析时,关键是看期望值与当前值的偏差。(目标值一般不与实际值去做比较!)
对其分析如下:
日志参数大类 | 用途 | 参数 | 详情 |
|---|---|---|---|
PSCD | Position Control Down 专门记录飞行器在垂直方向的位置、速度、加速度控制数据 |
| 目标位置(Target Position) - 飞行模式或导航系统设定的目标高度(相对于EKF原点) |
| 实际位置(Position) - EKF估算的实际高度位置(相对于EKF原点) | ||
| 期望速度(Desired Velocity) - 位置控制器输出的理想垂直速度 | ||
| 目标速度(Target Velocity) - 上级控制器设定的目标垂直速度 | ||
| 实际速度(Velocity) - EKF估算的实际垂直速度 | ||
目标位置(TPD) → 位置控制器 → 期望速度(DVD) → 速度控制器 → 期望加速度(DAD) → 姿态控制器 → 电机输出 |
| 期望加速度(Desired Acceleration) - 速度控制器计算出的理想垂直加速度 | |
| 目标加速度(Target Acceleration) - 上级控制器设定的目标垂直加速度 | ||
| 实际加速度(Acceleration) - EKF估算的实际垂直加速度 | ||
日志参数大类 | 用途 | 内部参数 | 详情 |
|---|---|---|---|
PSCE | Position Control East 记录飞行器在东-西方向的完整控制链数据 目标位置(TPD) → 与当前位置(PD)比较 → 位置控制器 → 期望速度(DVD) → 与实际速度(VD)比较 → 速度控制器 → 期望加速度(DAD) → 油门控制 → 电机输出 |
| 目标位置: 飞控系统设定的目标东向位置 |
| 实际位置: EKF估算的实际东向位置 | ||
| 期望速度: 位置控制器输出的理想东向速度 | ||
| 目标速度: 系统设定的目标东向速度 | ||
| 实际速度: EKF估算的实际东向速度 | ||
| 期望加速度: 速度控制器计算出的理想东向加速度 | ||
| 目标加速度: 系统设定的目标东向加速度 | ||
| 实际加速度: EKF估算的实际东向加速度 |
日志参数大类 | 用途 | 内部参数 | 详情 |
|---|---|---|---|
PSCN | Position Control North 记录飞行器在北-南方向的完整控制链数据 目标位置(TPN) → 与当前位置(PN)比较 → 位置控制器 → 期望速度(DVN) → 与实际速度(VN)比较 → 速度控制器 → 期望加速度(DAN) → 姿态控制器(滚转控制) → 电机输出 |
| 目标位置: 飞控系统设定的目标北向位置 |
| 实际位置: EKF估算的实际北向位置 | ||
| 期望速度: 位置控制器输出的理想北向速度 | ||
| 目标速度: 系统设定的目标北向速度 | ||
| 实际速度: EKF估算的实际北向速度 | ||
| 期望加速度: 速度控制器计算出的理想北向加速度 | ||
| 目标加速度: 系统设定的目标北向加速度 | ||
| 实际加速度: EKF估算的实际北向加速度 |
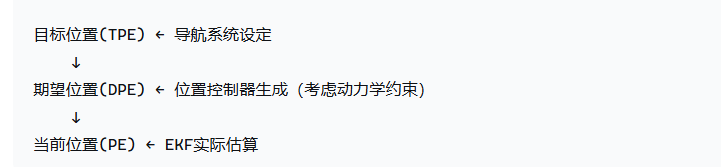
目标位置:可以理解为是导航系统生成的理想值。
期望位置:位置控制器通过各种滤波算法生成的。
当前位置:实际值。
4、RTL返航模式(需卫星定位)
概述:
RTL模式将引导飞行器飞回HOME上方,如果是多旋翼则还会出发降落加锁,如果是固定翼则是返航到头顶进行盘旋,需要人为通过遥控器接管并降落。
当飞行器高度高于RTL_ALT时将保持原有高度,反之则按RTL_ALT高度飞行,默认值为15m,用户可自行设置返航高度。
对于旋翼飞行器,RTL将返回至GPS定位后解锁的地方。
可配置的参数如下:
RTL_ALT,返航的最低高度。默认是1500cm(15m),设0则代表以当前高度进行返航。
RTL_ALT_FINAL,设置返航阶段的最后高度。 加入设置成500cm,则代表下降到距离地面5m高度时,触发LAND模式。这么设置的作用是,可以让最后的降落分为2个阶段,在2个阶段都可以分别设置不同的下降速度。
WPNAV_SPEED_DN,第一阶段的降落速度,默认是150cm/s。
LAND_SPEED,设置最后降落时的速度。默认是50cm/s。
RTL_LOIT_TIME,返航到头顶时的悬停时间,默认是悬停5S后,再执行降落。
RTL_SPEED,返航时的水平飞行速度。如果设置为0,那么会使用WPNAV_SPEED的参数。
WP_YAW_BEHAVIOR,设置任务和RTL中的偏航角度。默认=2,有以下3个参数可以设置:=0,从不转航向,在自动飞行过程中,始终保持起飞时的机头朝向;=1,机头一直朝着下一个航点,这样在返航到头顶时,无人机机头是朝着home点方向,可能会让操作人 员"对头降落"; =2机头一直朝着下一个航点(返航除外),这样会在返航到头顶时,旋转到与起飞时的朝向一致,通常可以有效避免飞手“对头降落”。
5、AUTO自动模式(需卫星定位)
概述:
用户可通过地面站预航点信息,执行Auto模式后,无人机将自动执行航点飞行,待航点执行完毕后,无人机将会执行自动降落并于着陆后自动上锁。
任何时候Auto模式都可以切换到其他模式,当再次回到Auto模式时,从头开始执行任务。
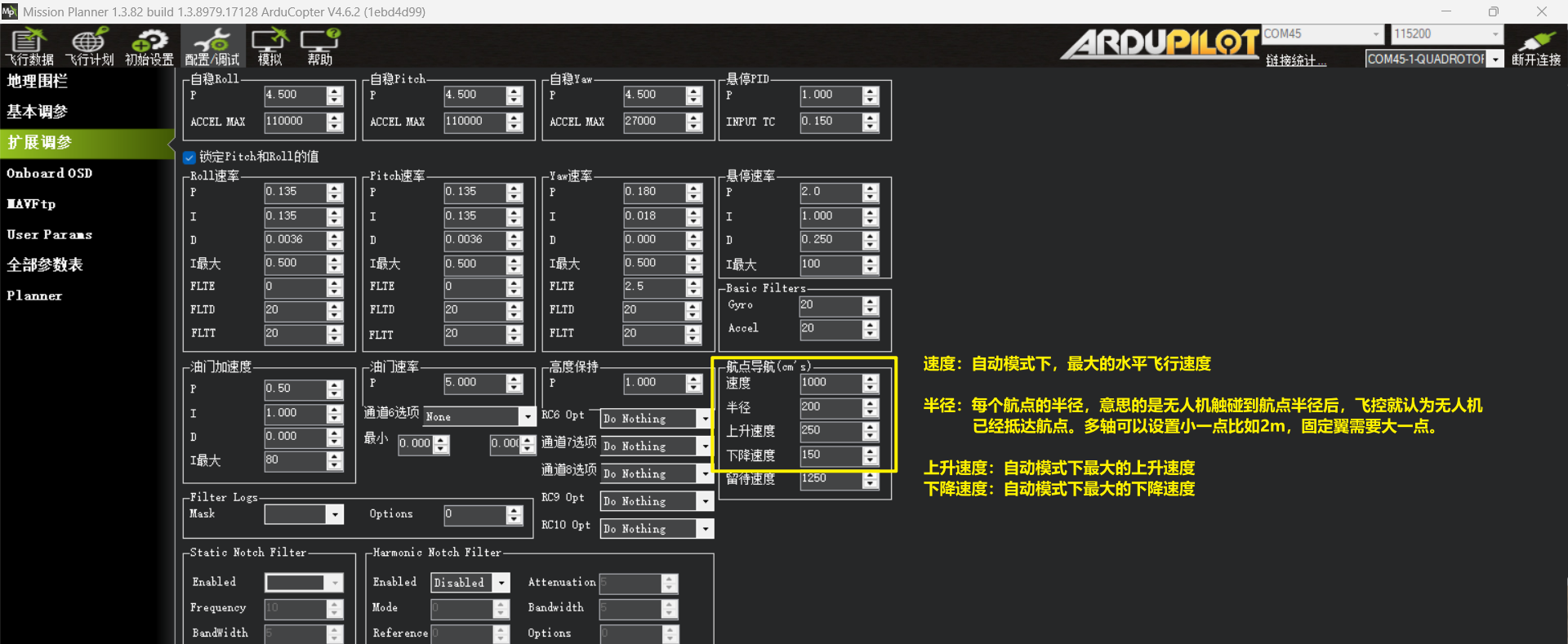
Auto模式可设置的参数:
如何触发自动模式?
无人机的上已设置好航线任务,并已上传。
方法1:将Auto模式设置在遥控器的3档开关上,通过遥控器解锁并升空后,将飞行模式切换到Auto模式挡位。
方法2:
1)通过missinonplanner规划航线任务,并在第一个航点中设置 "TAKEOFF命令"。
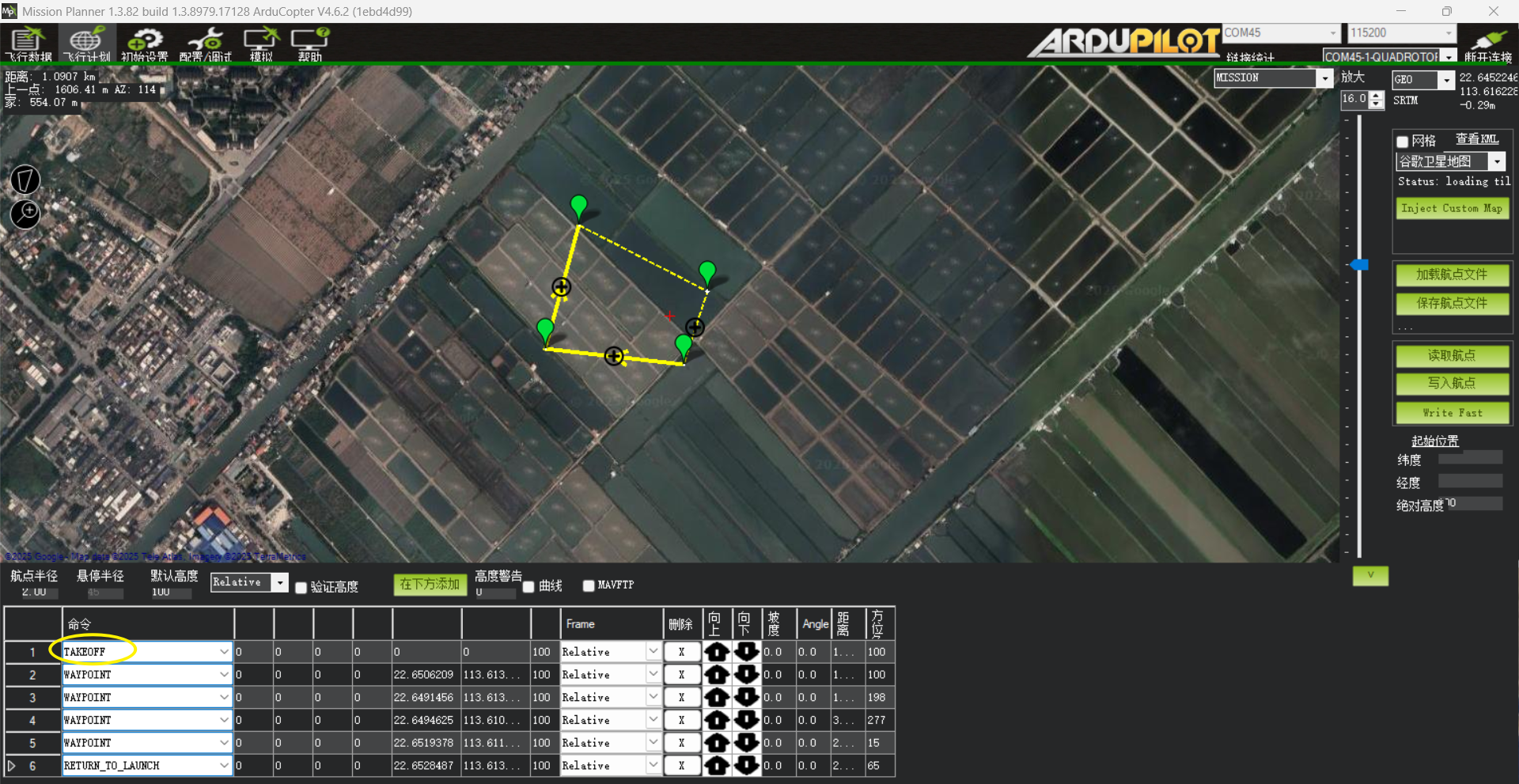
2)无人机首先在地面执行解锁,无人机在解锁怠速过程中,再通过地面站的动作指令,执行“Mission_Start”指令后,无人机将会执行自动起飞,起飞到TAKEOFF 指定的高度后将会朝着下一个航点飞行。

6、Land降落模式(自动模式下)
Land模式比较容易理解,通常有2类场景会触发Land模式:
1)在Auto模式的最后阶段,会触发Land模式。
2)无人机当前的飞行模式,是以GPS定位的模式飞行(Auto、Loiter、PosHold等),一旦GPS卫星丢星时,飞控默认会触发无人机执行Land模式,用户可以通过参数FS_EKF_ACTION进行设置,默认FS_EKF_ACTION=1(GPS丢星后触发LAND模式),可根据实际情况将FS_EKF_ACTION=2(GPS丢星后切换为定高模式)


两段下降速度修改:
下降分为2段,第一段下降速度较快默认是150cm/s,如下图所示:
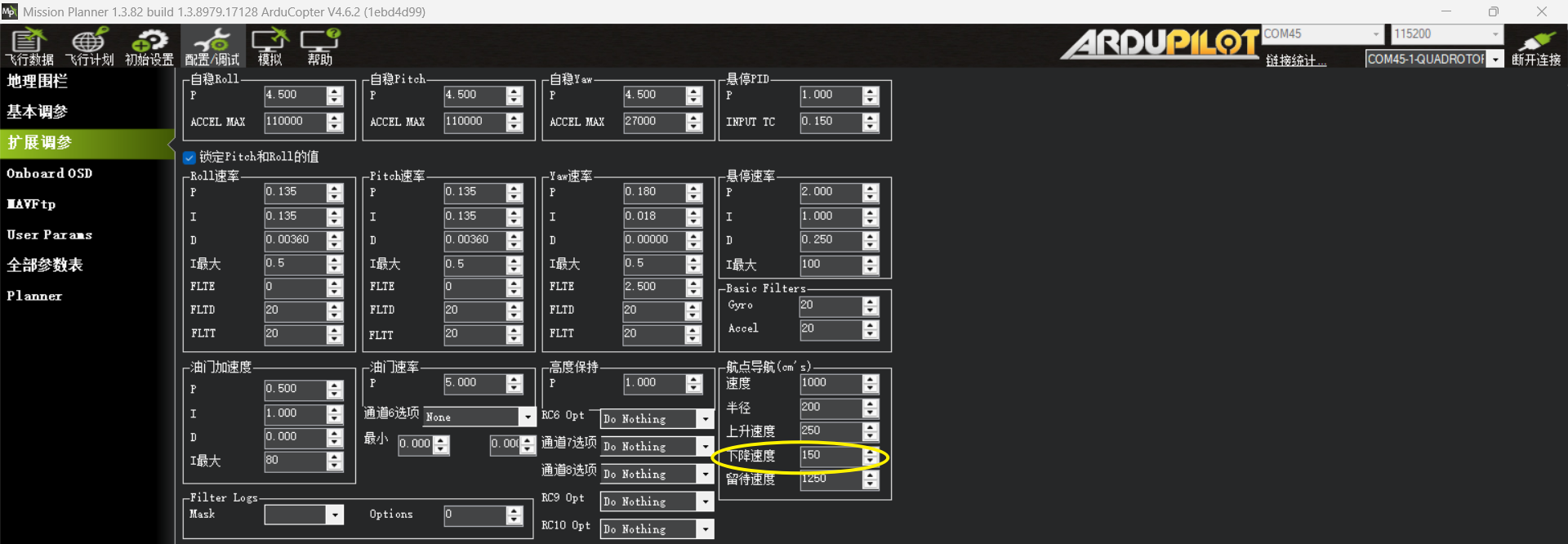
第二段下降速度较缓慢,默认是50cm/s,通过全部参数LAND_SPEED进行修改!

具体是从多少m的高度开始切换降落速度,通过LAND_ALT_LOW参数进行设置,默认是10m,最高可以设置为100m!

在定高或定点等具有油门自动控制的模式下,手动操控最大上升速度可通过参数PILOT_SPEED_UP进行设置,默认为2.5m/s。
手动操控最大的下降速度可通过参数PILOT_SPEED_DN进行设置,默认是0。它将会使用与PILOT_SPEED_UP一样的数值!!

7、Guided引导模式
Guided引导模式,可以理解为是地图上选点飞行模式!在地图上选择一个坐标,确认后无人机就会朝着这个坐标飞去。
注意:使用Guided引导模式的前提是Loiter悬停模式调试正常,无人机在Loiter悬停模式下可以正常悬停。
使用Guided模式可以实时修改目标点、飞行高度。
在Guided引导模式下,无人机抵达用户设定的目标位置后,就会在此点悬停,并等待用户的下次选点指令。
结束Guided模式,可通过遥控器的3挡开关切换到手控模式即可退出。
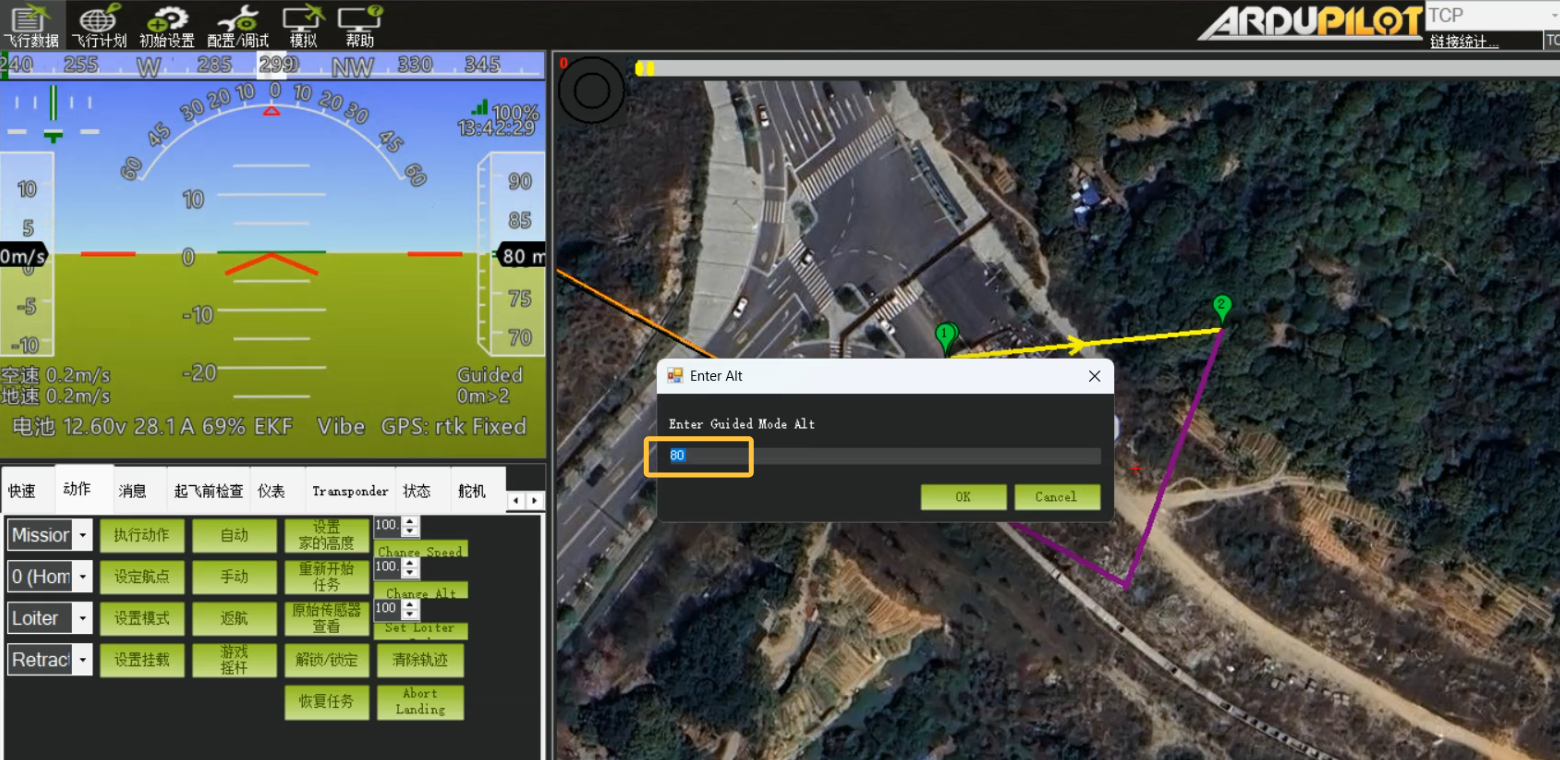
具体操作如下:
1、用户在地图页面上,通过移动鼠标光标选择一个坐标点,然后鼠标右键单击“飞行至此处”
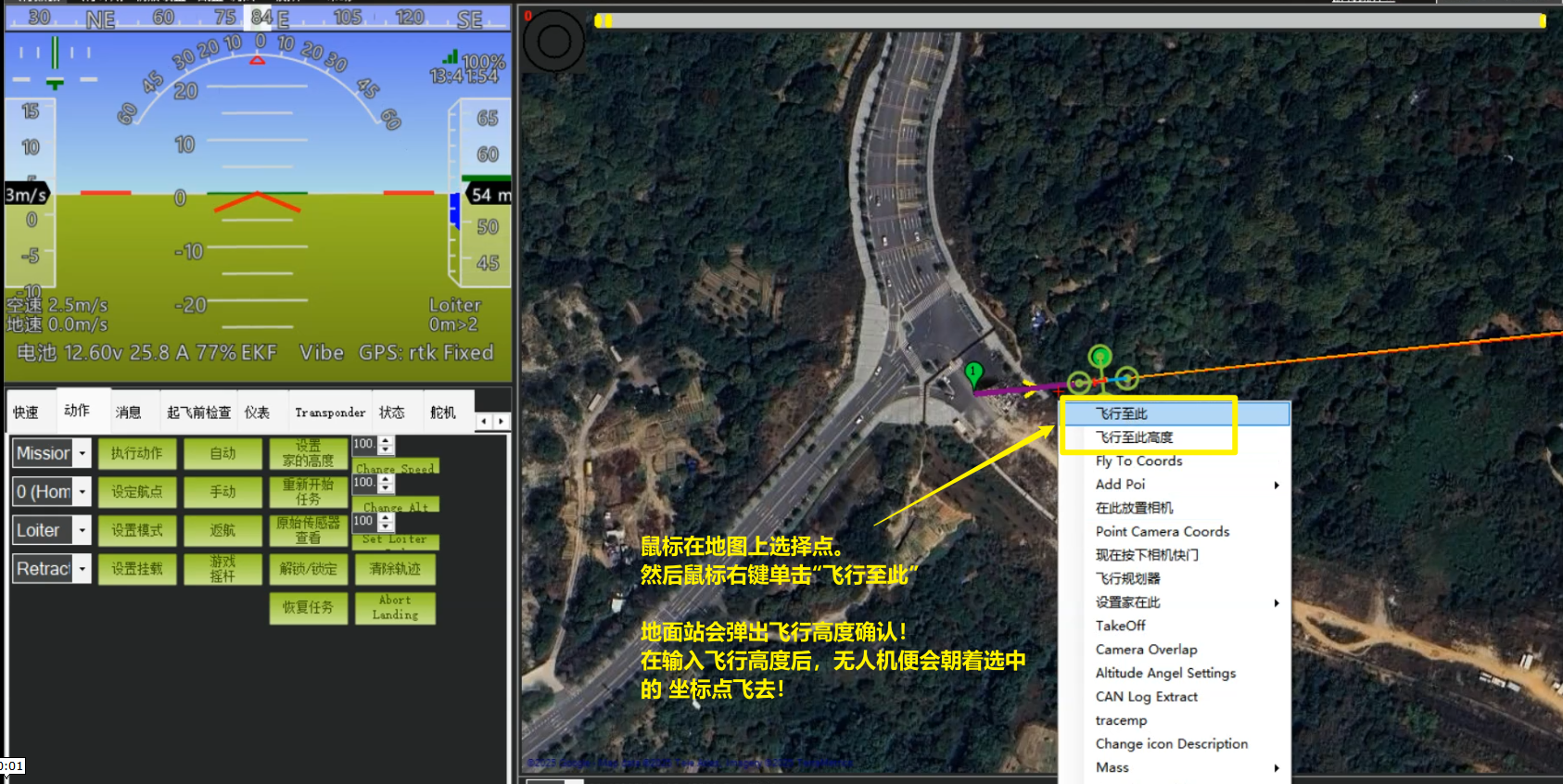
2、地面站会弹窗提示用户输入飞行高度。
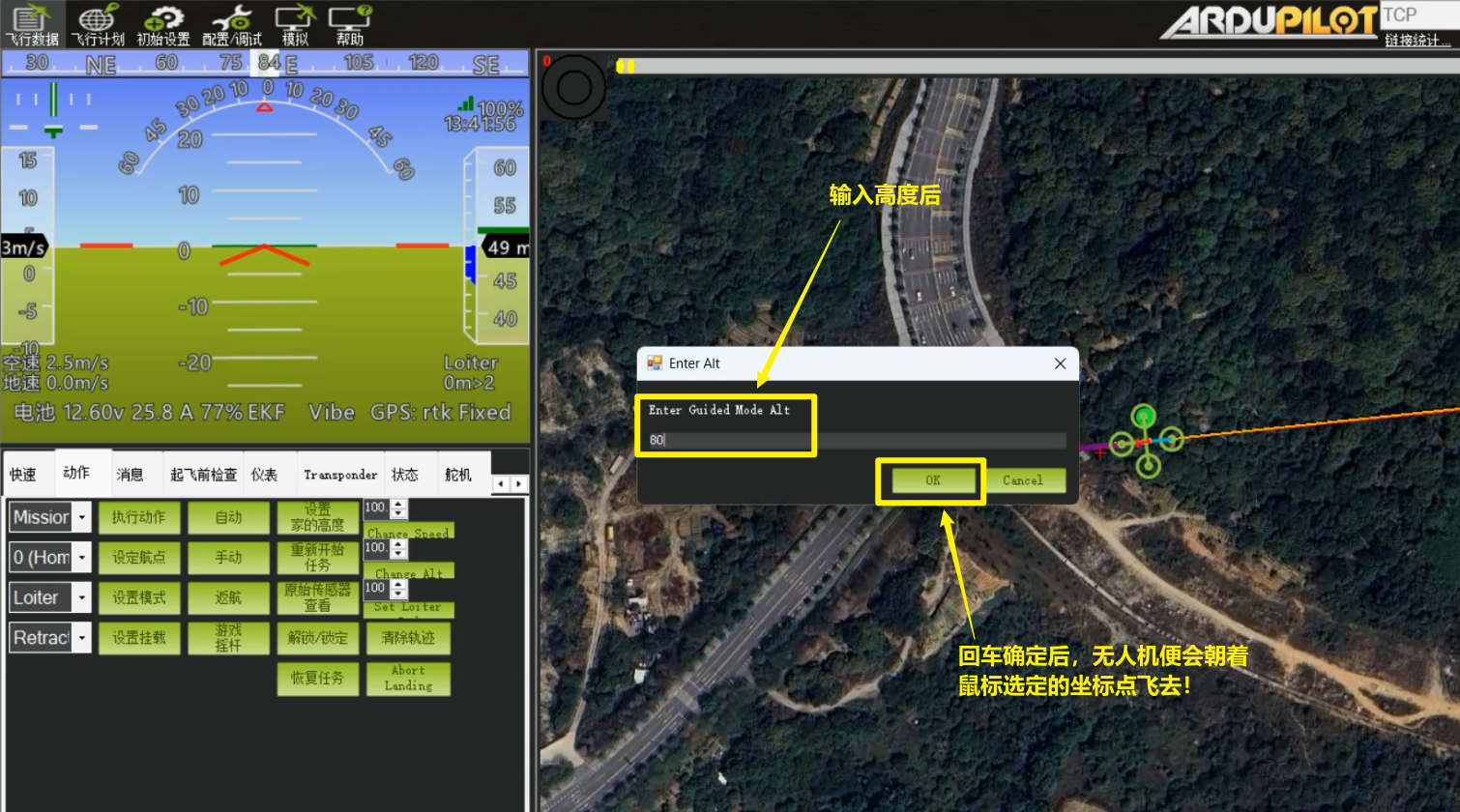
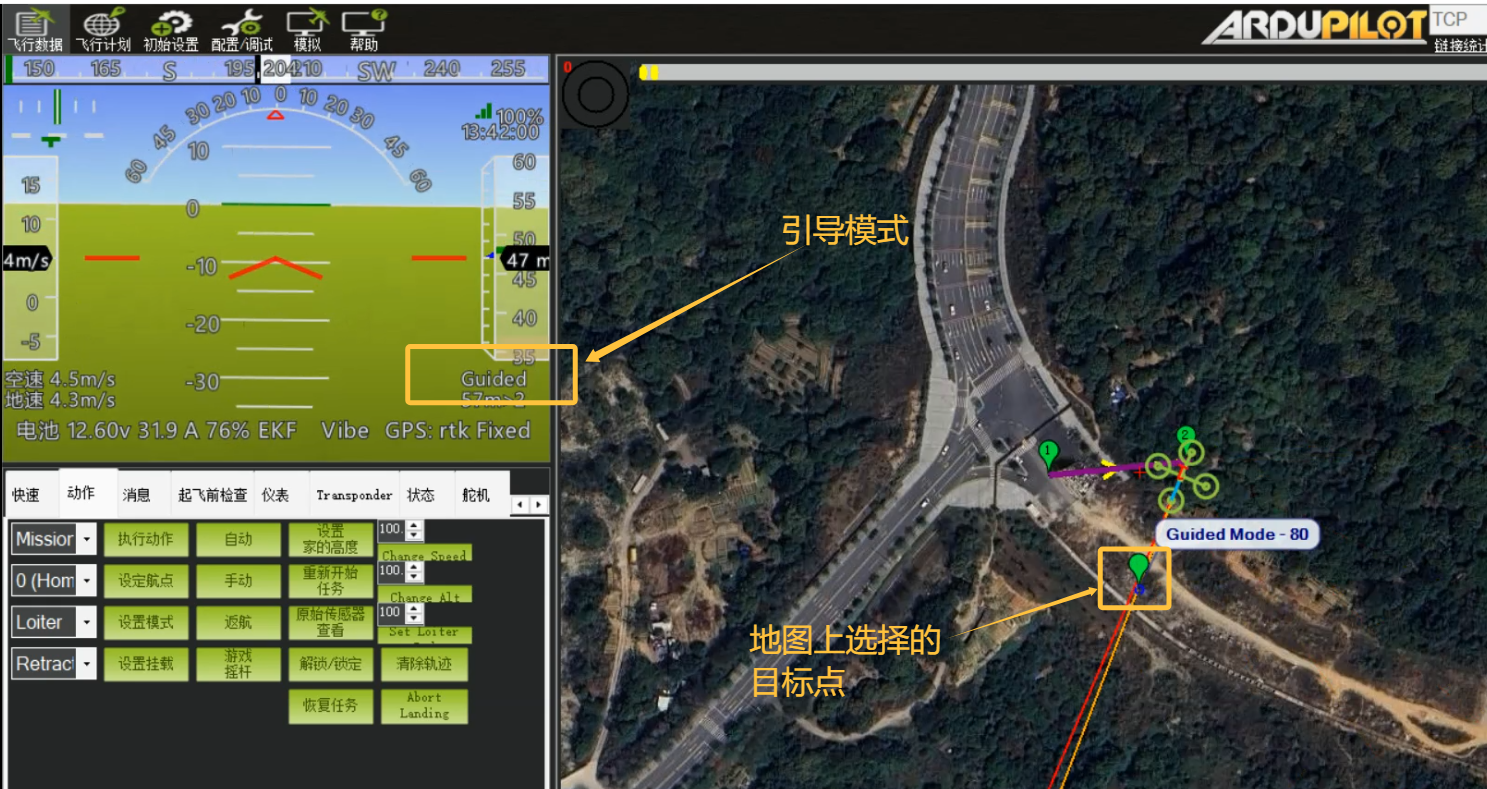
3、回车键敲下时候,地面站的 飞行模式将会变成Guided引导模式
4、修改飞行高度,需要在地面页面,鼠标右键单击,选择“飞行至此高度”,此时地面站会弹出高度输入栏。
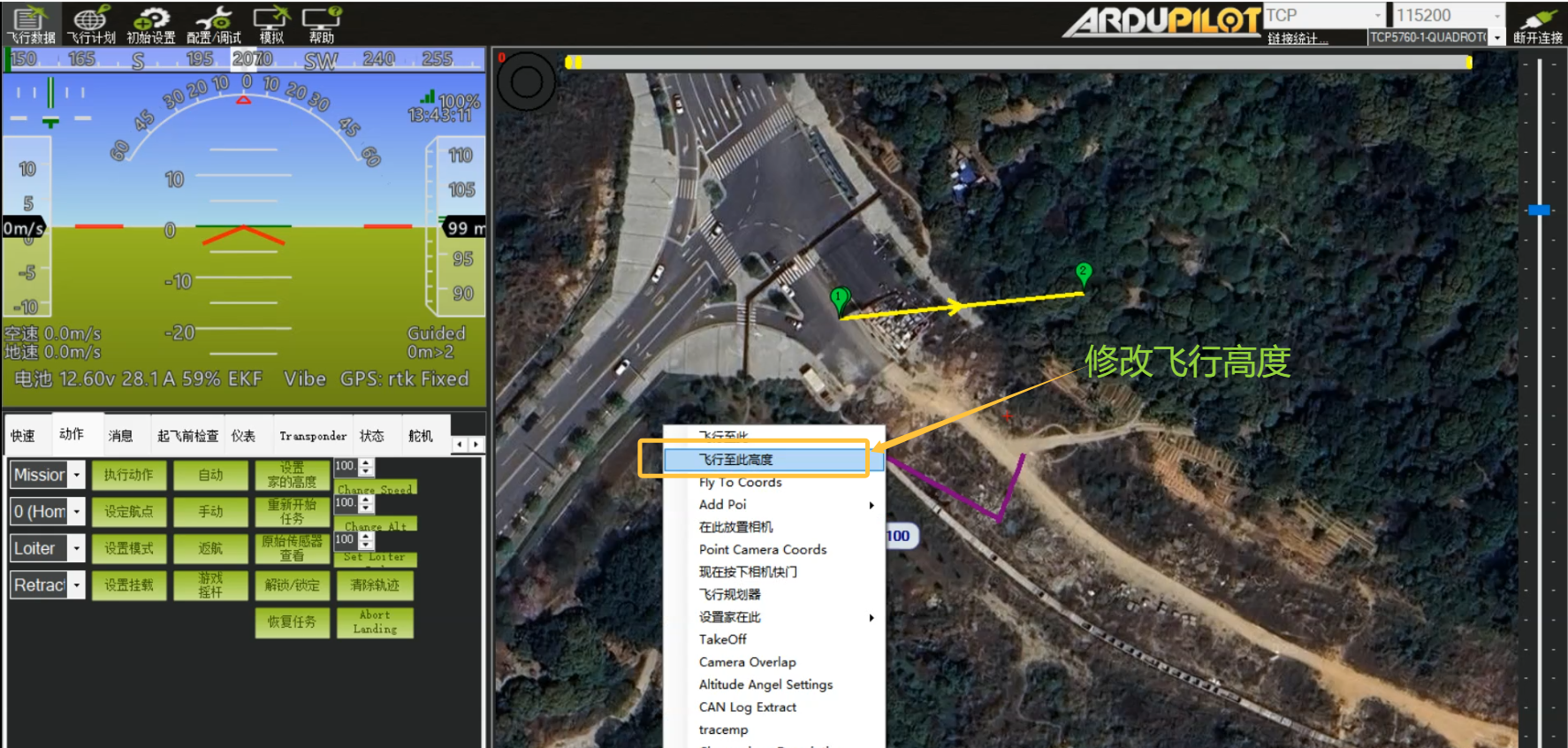
5、通过“飞行至此处”和“飞行至此高度”,用户可以在飞行过程中,可以实时修改目标位置 和飞行高度。
6、退出Guided引导模式
结束Guided模式,可通过遥控器的3挡开关切换到手控模式即可退出.
结束Guided模式且想要进行返航降落时,可直接点击地面站上的 “返航”按钮进行返航模式。
