基础设置11-失控保护与低电量保护配置
一、遥控器油门失控保护(仅使用传统SBUS协议的接收机需设置)
应用对象:
使用单线Sbus协议的朋友需要设置油门失控保护,比如乐迪AT9、天地飞9等老型号的遥控器。
Sbus协议的接收机,只是单向接收遥控器发射过来的信号。
注: 如果使用的是EdgeTX遥控器+ELRS接收机的朋友,则不需单独去设置油门失控保护,因为ELRS接收机已配置为CRSF这种双向通讯协议。
1.1 遥控器油门信号失控保护原理
底层原理:
当Sbus协议的接收机检测到与遥控器通讯中断时,接收机会按照提前预设的PWM舵量向飞控输出信号。
(这个提前预设的舵量,在日常使用过程中是不会出现的 。打个比方:正常使用时摇杆的舵量行程是-100至100,那么失控时的最低舵量会变成-200)
在接收机端:
当接收机接收不到遥控器端的发射机,发送过来的信号时,接收机可以自己判断当前处于失控状态。
因此,可以预先设定的接收机一旦失控,那么就让接收机的1个或多个通道,自动输出某个PWM值。
在飞控端:
在AP飞控固件中,设有一个油门失控保护的逻辑,一旦监测到油门通道低于某个值,就判断接收机失控了!
通常将油门通道(第三通道)会自动切换到一个油门拉到最低也不会出现的PWM的值。(例如930)
遥控器设置油门通道失控PWM值时,一定要注意:在通讯状态下,哪怕遥控器的油门杆拉到最低位时,MP地面站所显示的油门PWM也不会低于我们预设的油门通道失控PWM值。
飞控板读取到第三通道为930值的时候,就认为RC遥控器已经失控,从而切换对应的保护模式,会有以下2种情况:
1)无人机处于遥控器直接控制的情况,无人机会触发失控返航。
2)无人机当前处于自动模式(Auto),正在执行航线任务,用户可以选择触发返航或者等待任务执行完毕后再返航。
1.2 遥控器信号失控保护设置
那么设置好遥控器信号失控保护后,会是什么现象,本人以乐迪AT9S遥控器为例!给大家做演示:
1)地面站设置
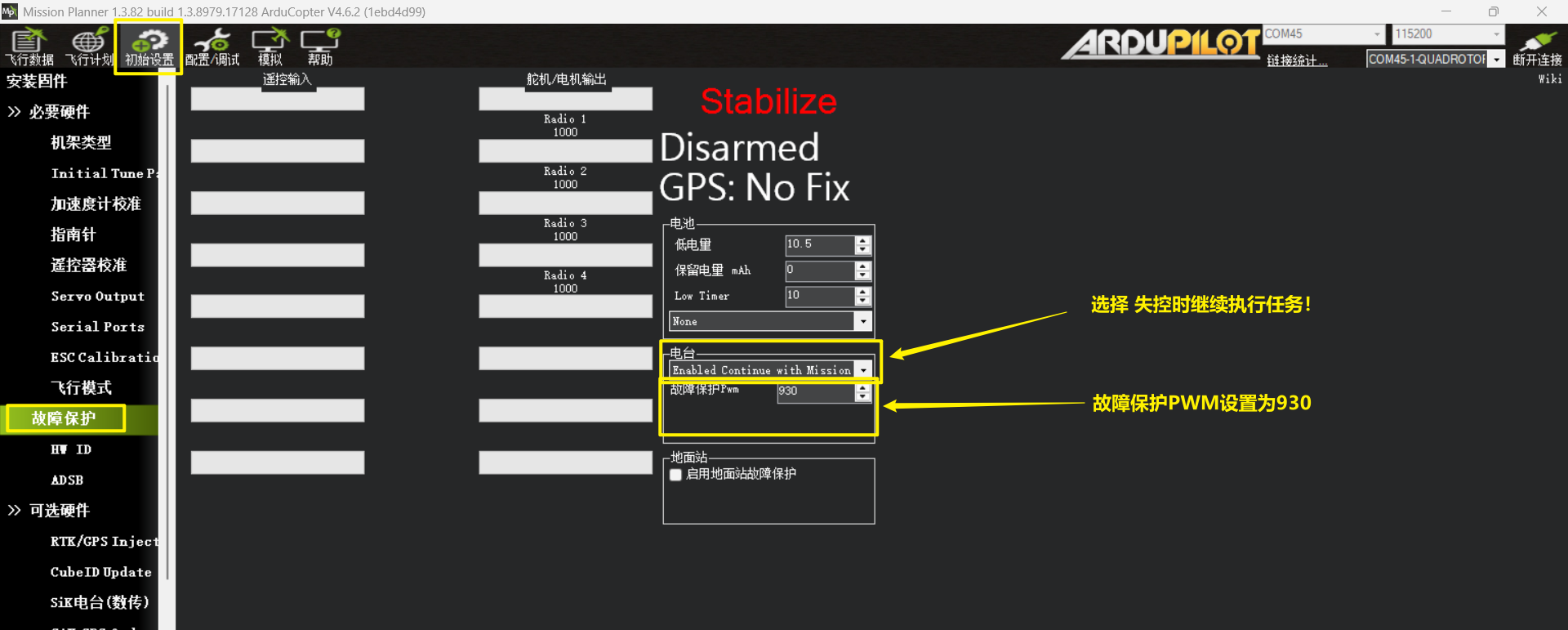
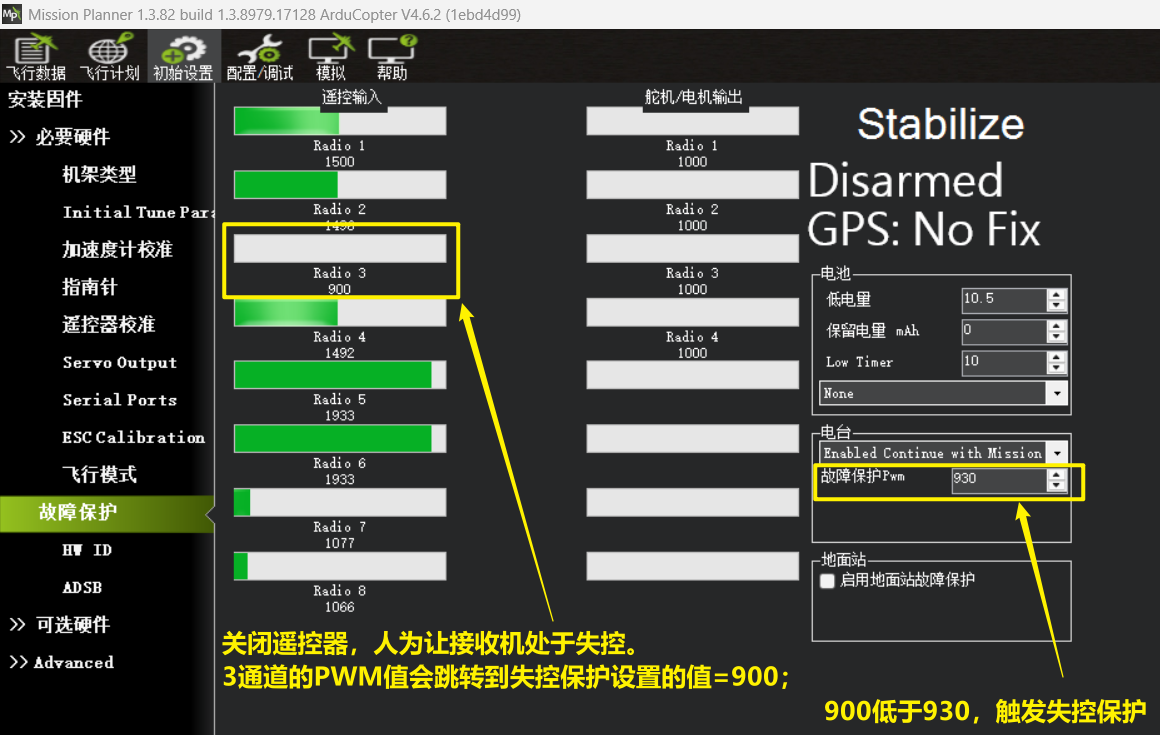
设置的故障保护PWM是930,意思是:当遥控器失控时油门通道的PWM值低于930,无人机就会触发失控保护!
上述也两个处设置,也可以通过全部参数进行设置,如下: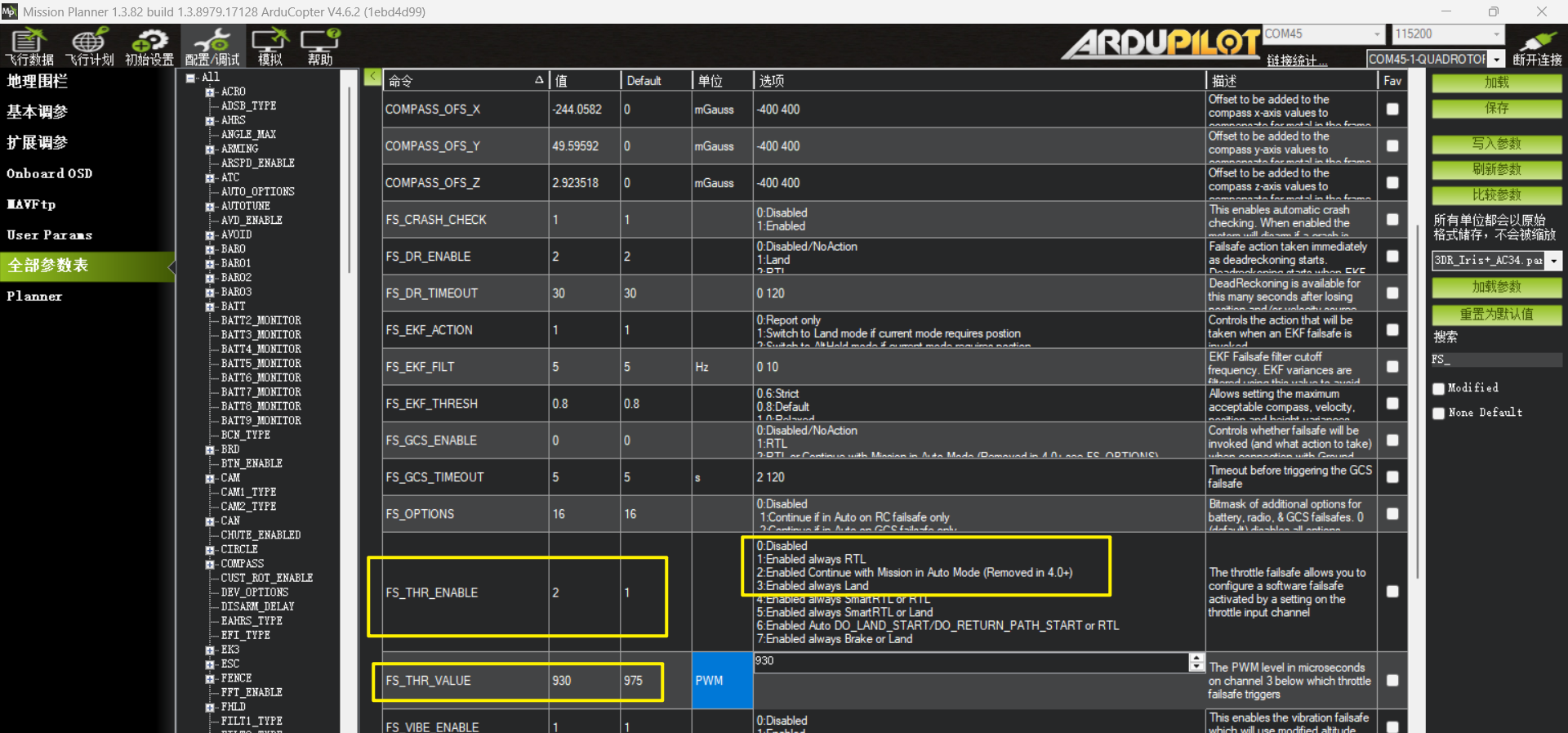
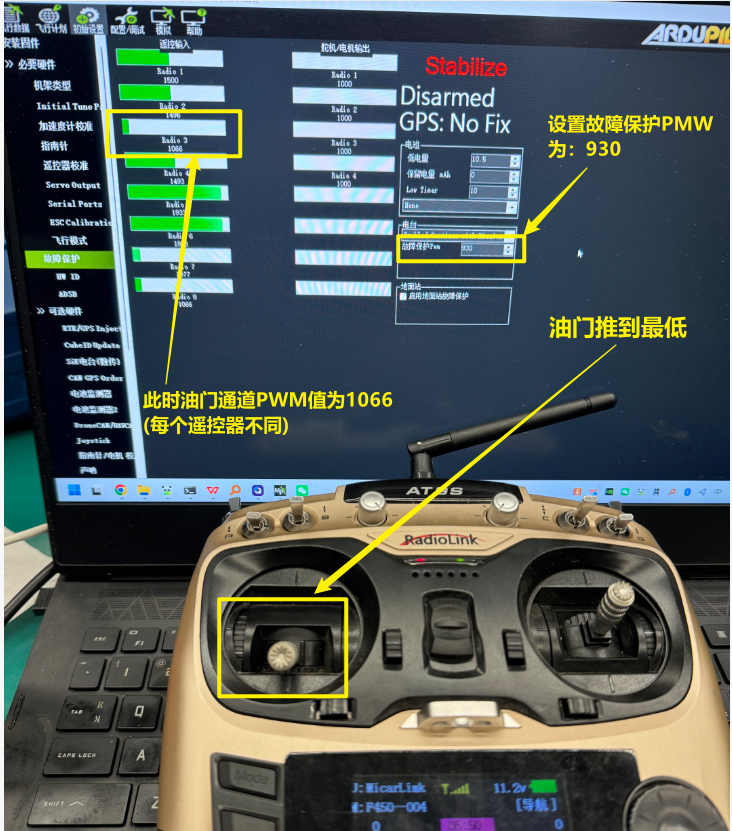
2)失控保护设置之前的确认
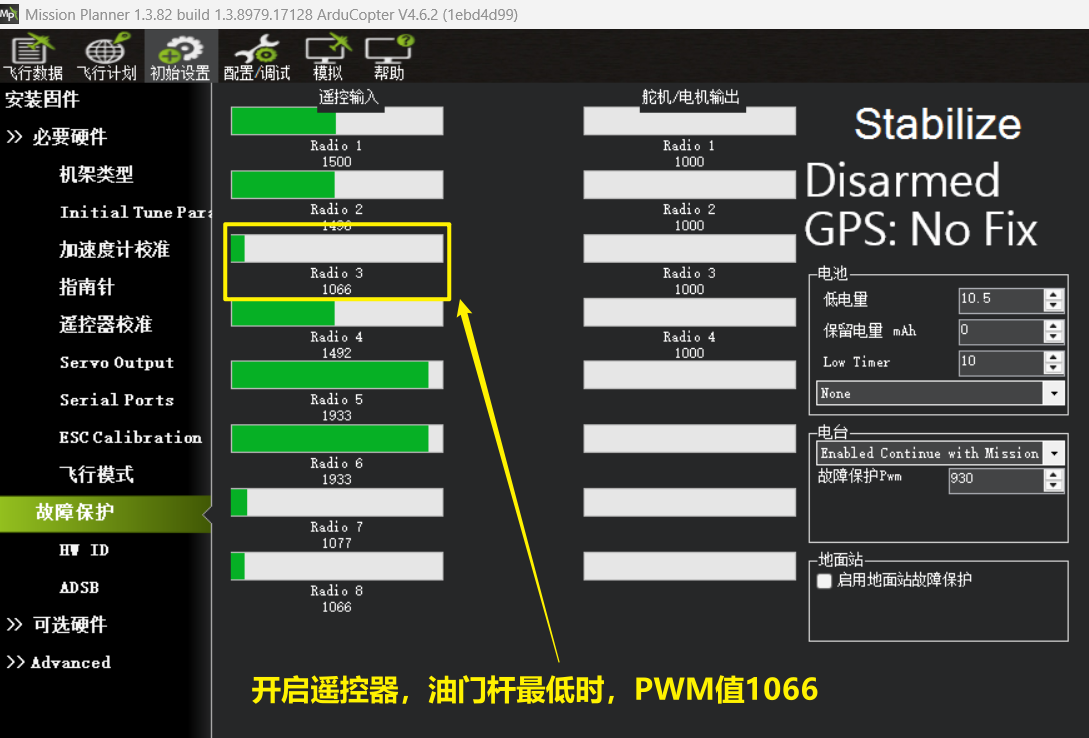
在接收机与遥控器正常连接时候 , 请确认将遥控器的油门杆拉到最低,油门3通道最低值不会低于设置的故障保护值PWM(930)。
比如此时我最低的油门杆对应的PWM是1086,设置的故障保护PWM是930!
3)设置遥控器的失控保护。
遥控器失控时,其油门通道的PWM值会从最低的1086跳到低于930,从而触发失控保护。
由于每个遥控器的失控保护设置方法都不同,因此具体遥控器怎么设置失控保护,大家请自行查阅资料或咨询厂商。
本人的乐迪遥控器设置好失控保护后,从此处查看:
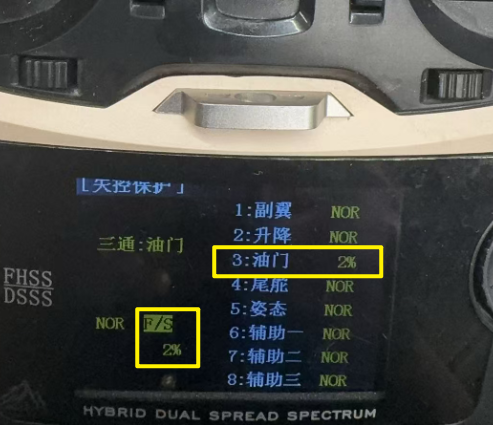
4)关闭遥控器电源,通过地面站查看,3通道的PWM值是否低于930。
开启遥控时:
关闭遥控器:
二、无线电台失控保护
当用户使用了无线数传电台进行通时,无线电台可能也会因为距离超出控制范围/受到干扰等情况,导致无线数传电台断开连接。
此时我们也可以设置无线数传电台失控保护。
具体设置方法非常简单,将参数FS_OPTIONS=3(默认为0),将参数FS_GCS_ENABLE=0;
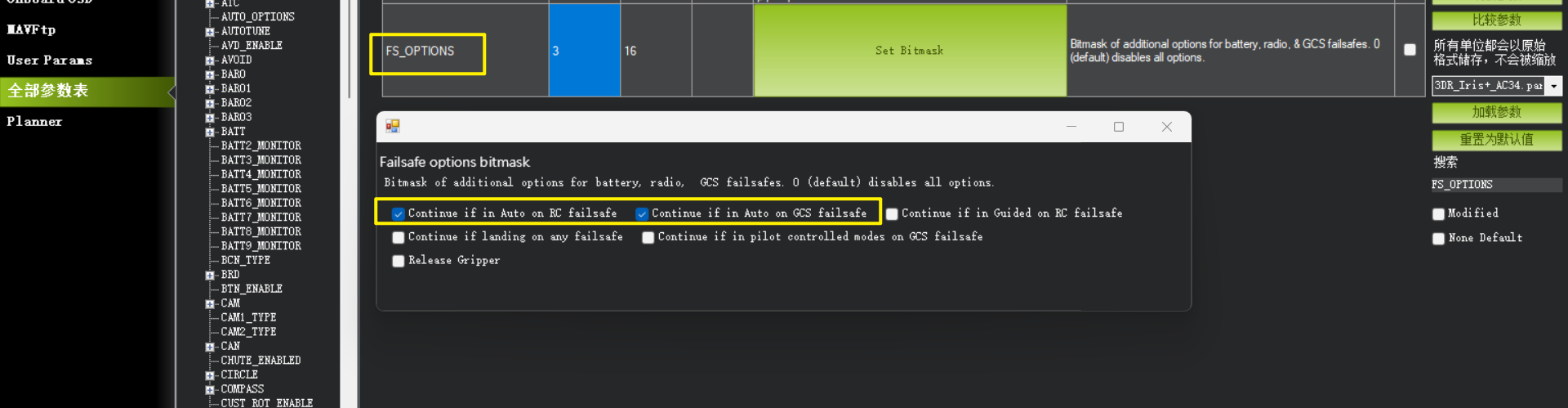
之前的就参数不要去修改它,保持为0。

三、电池低电压/低电量保护
无人机上装机电池监测器模块,那么就可以监测电池实时电压,并且通过实时电流估算剩余电量mah。
如果需要启用低电量保护功能,那么必须安装电池检测器模块,具体配置与接线可参阅《电池检测器-外设硬件》
需要设置以下参数:
参数1:BATT_CAPACITY,充满电后的电池的mah容量,默认为3300。用户根据实际情况设置。(比如用的10000mah的电池就填写10000)
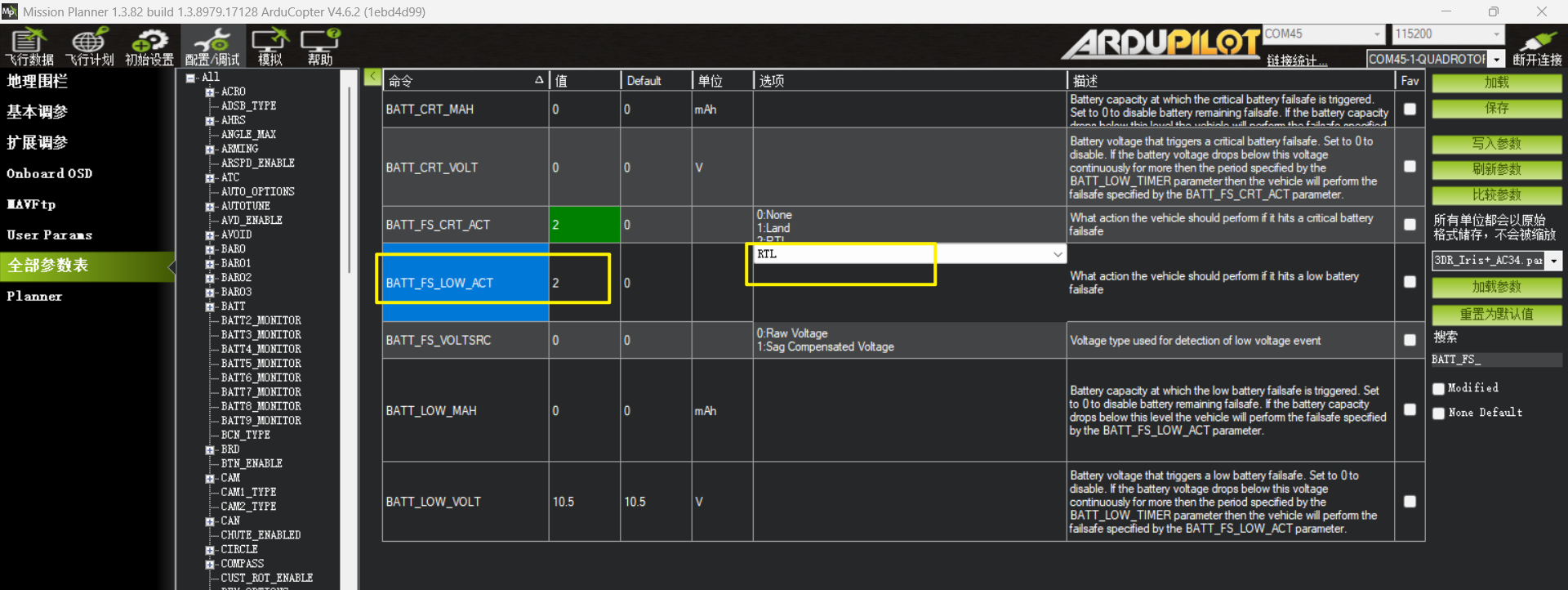
参数2:BATT_LOW_VOLT,当电池低于多少V后,触发低电压保护,默认为10.5V。用户根据实际情况设置。正常情况设置3.6V/节。(如果将该值设置为0,那么就是关闭低压保护)
参数3:BATT_LOW_TIMER,当电压低于设置的保护电压多少秒后,触发低电量保护,默认为10s。
参数4:BATT_LOW_MAH,当电池的容量低于多少mah后,触发低电量保护,默认为0。因为剩余mah容量的估算会存在一定误差,大家一般就是通过低电压进行返航。
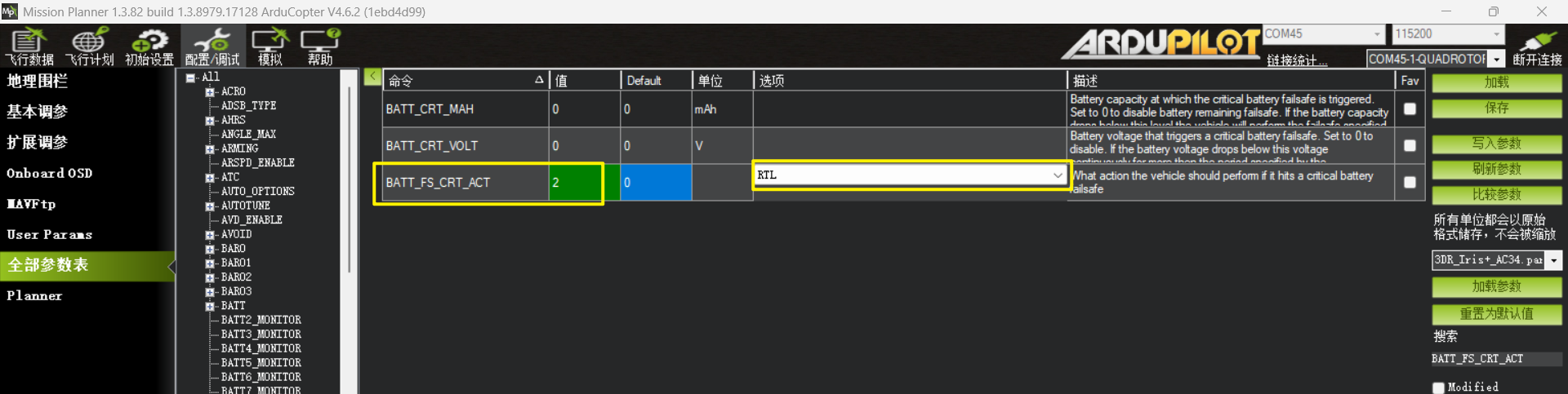
参数5:BATT_FS_CRT_ACT,当触发低电量保护时的动作。默认为0,无动作。建议修改为=2(返航)。
参数6:BATT_FS_LOW_ACT,当触发低电压保护时的动作。默认为0,无动作。建议修改为=2(返航)。
四、GPS丢星保护
当前无人机以GPS定位的模式飞行时,如果突然丢失GPS定位信号,需要触发模式保护。
一般选择切换为定高模式、或者降落模式
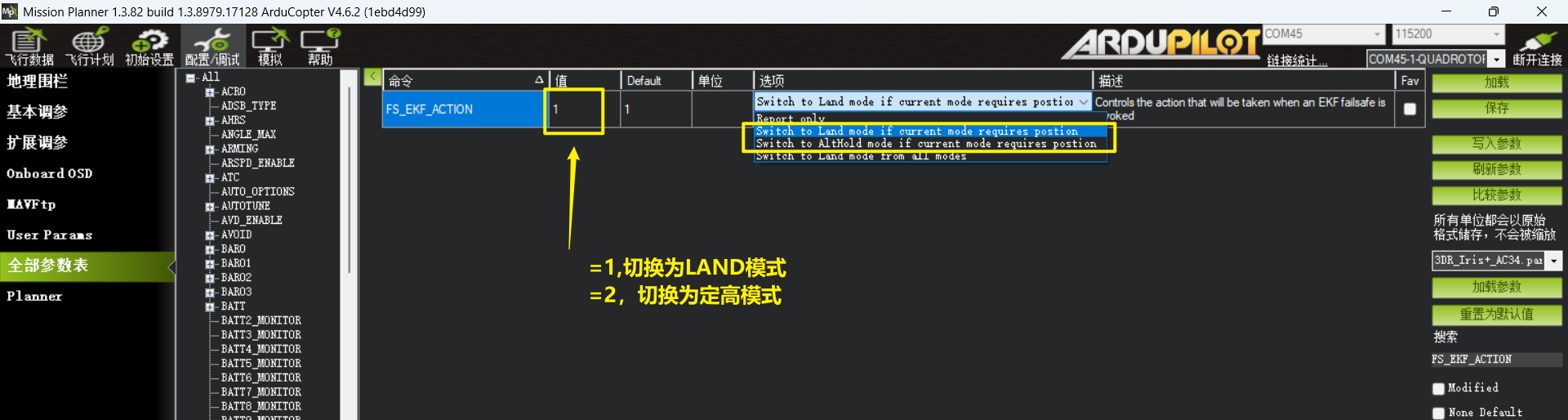
通过参数FS_EKF_ACTION进行设置,大家根据实际情况设置,默认是 = 1,丢失卫星定位后切换为降落模式。
FS_EKF_ACTION = 1,GPS丢星后自动切为降落模式.
FS_EKF_ACTION = 2,GPS丢星后自动切为定高模式.