4、WFG100飞控使用说明书
WFG100飞控采用STM32H743处理器,具双IMU等核心传感器,支持10路PWM、3S - 6S电池输入,接口丰富,适配APM和BF固件,可下载固件,还涉及姿态、接线等说明。
WFG100飞控使用说明书
注意:
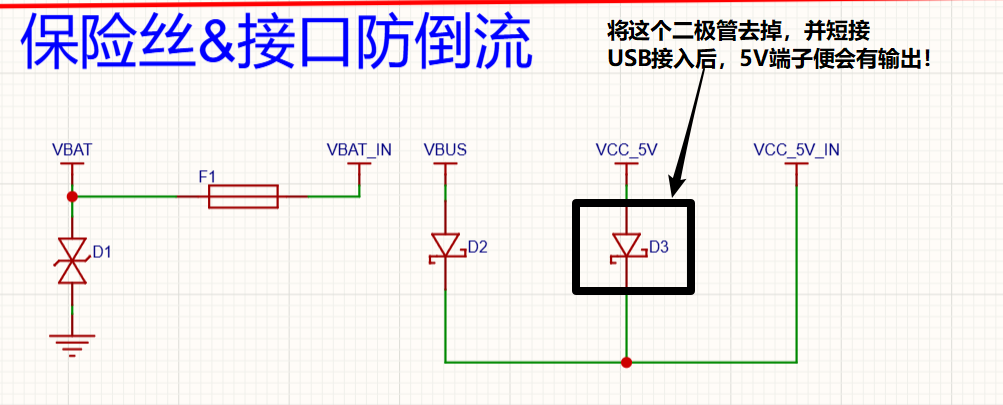
在开源V1版本中(在开源V2版本中,则直接移除了这个保护,USB通电后便会有5V输出)
为防止外设的大电流烧坏电脑USB口,USB供电与外设供电做了隔离!
飞控必须接入电池后,SH1.0端子连接器上的5V才会有输出;
使用USB供电,接收机和GPS接入后没有上电(因为端子没有5V输出),属正常现象,大家切记!
如果不要这个保护,想要插入USB线,就有5V输出。
只需要去掉一颗D3二极管,并短接二极管上的两个焊盘即可,如下图所示:
飞控概述
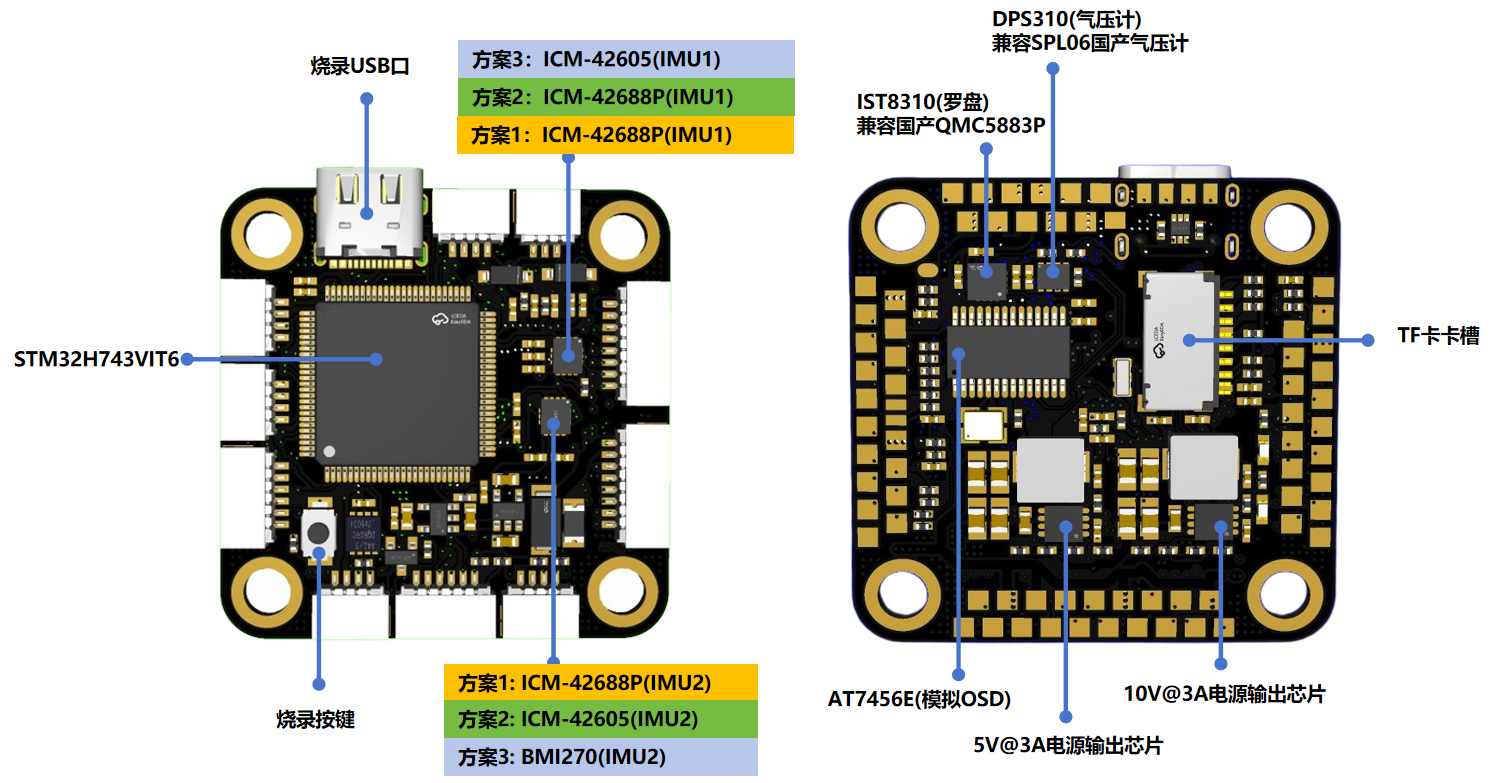
WFG100A 是一款开源飞控,核心搭载480MHz主频的STM32H743VIT6高性能处理器,采用双工业级IMU传感器能够显著提升低温飘特性和抗震性能力,为高速机动飞行提供稳定基石。同时还板载集成磁罗盘、高精度气压计及OSD模块,所有接口焊盘全引出,预留高清图传接口、IIC、CAN、SPI等丰富接口,赋予了玩家强大的扩展能力与二次开发潜力。
2025.12.20日更新:
考虑到飞控核心传感器的价格以及淘宝假货众多的情况,因此在代码中对气压计、磁罗盘都做了国产型号的兼容,也进行了多种IMU组合的兼容!
针对内置磁罗盘传感器,支持2种传感器,任意选用1种即可:
型号1:QMC5883P(国产最新的型号,推荐使用)
型号2:IST8310(国外型号,比较敏感,不建议使用)
针对气压计传感器,支持2种传感器,任意选用1种即可:
型号1:DPS310(国外型号)
型号2:SPL06-001(国产型号)
针对2个MU传感器,支持3种组合方案,任意选用1种组合方案即可:
方案1:双42688P
方案2:ICM-42688P + ICM-42605
方案3:ICM- 42605 + ICM-BMI270
(原本还想做方案4:BMI088+BMI270的方案设计,奈何BMI088的封装比较大,与42688P的封装不一样,无法兼容当前的WFG100硬件!)
飞控特性
- 软硬件设计资料全开源,兼容4大开源飞控固件!
- STM32H743系列处理器,480MHZ工作主频,2MB Flash程序存储,1MB SRAM;
- 8路电调PWM信号+2路辅助通道,最高支持Dshot1200;
- 飞控板载10V3A电源输出,为图传提供稳定供电。
- 内置两组IMU传感器,平滑滤波降低噪音;
- 板载磁罗盘,支持外置IIC罗盘扩展;
- 内置高精度气压计,支持飞行高度保持;
- 丰富的对外接口且通过焊盘全引出,方便实际使用及拓展;
- 预留高清图传接口,支持大疆/蜗牛图传方案的接入;
- 预留IIC&CAN&SPI接口,为二次开发提供传感器接入;
参数规格表
| 规格项 | 详细参数 |
|---|---|
| 主控芯片 | STM32H743VI (480 MH主频 、 2 MB Flash 、1 MB SRAM) |
| 核心传感器组合 | 板载IMU×2颗,支持以下3种组合:IMU组合1:双ICM-42688PIMU组合2:ICM-42688P(IMU1)、 ICM-42605(IMU2)IMU组合3:ICM-42605(IMU1)、BMI270(IMU2)板载气压计 DPS310 (已兼容SPL06气压计)板载罗盘IST8310(已兼容QMC5883P罗盘)淘宝小店售卖的飞控为V3版,其传感器型号如下:ICM-42605(IMU1)、BMI270(IMU2)、SPL06、QMC5883P |
| OSD芯片 | AT7456E(模拟图传OSD) |
| 飞行日志记录 | TF卡 |
| PWM通道 | 10路 PWM信号 (其中1-8路支持DShot/双向DShot) |
| 电池输入 | 支持3S-6S电池电压输入 |
| 两路BEC输出 | 5V@3A、10V@3A |
| 电压与电流监测接口 | 2路(集成在飞控PWM接口上) |
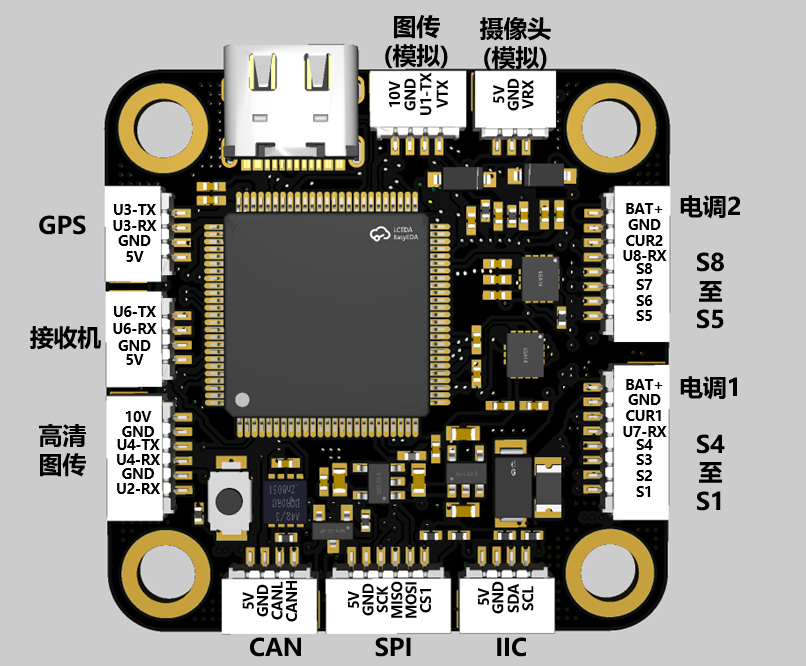
| SH1.0对外接口 | ELRS/SBUS接收机接口 X 1个、模拟摄像头接口 X 1个、模拟图传接口 X 1个、电调信号输出1 X 1个(BAT+,GND,CUR1,U7-RX,S4,S3,S2,S1)、电调信号输出2 X 1个(BAT+,GND,CUR2,U8-RX,S8,S7,S5,S6)、GPS接口 X 1个、高清图传接口 X 1个、CAN接口 X 1个、SPI接口 X 1个、IIC接口 X 1个、注:上述接口均全部引至底面焊盘,详见焊盘定义图。 |
| 焊盘引出的接口 | LED接口、蜂鸣器接口、空速计接口、RSSI接口、空速计接口M9与M10接口(PWM9电机信号输出、PWM10电机信号输出) |
机头朝向、飞控姿态定义
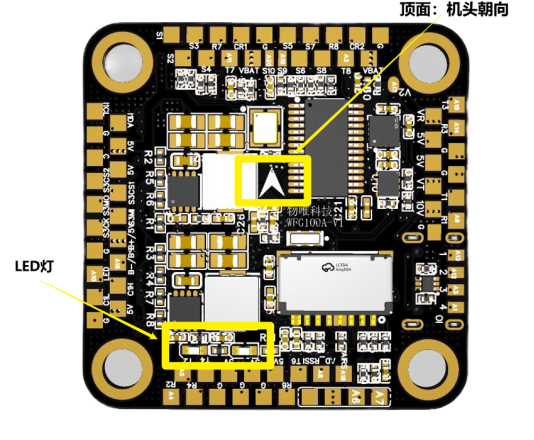
机头朝向
在BF固件以及APM固件中,默认是以焊盘点为顶面,机头朝向如下图所示。用户如需更换安装方式,可以在飞控中通过参数进行翻转!
修改飞控的正反面安装方向,请查看文档《调整飞控的正反面安装方向》
飞控接口、焊盘定义
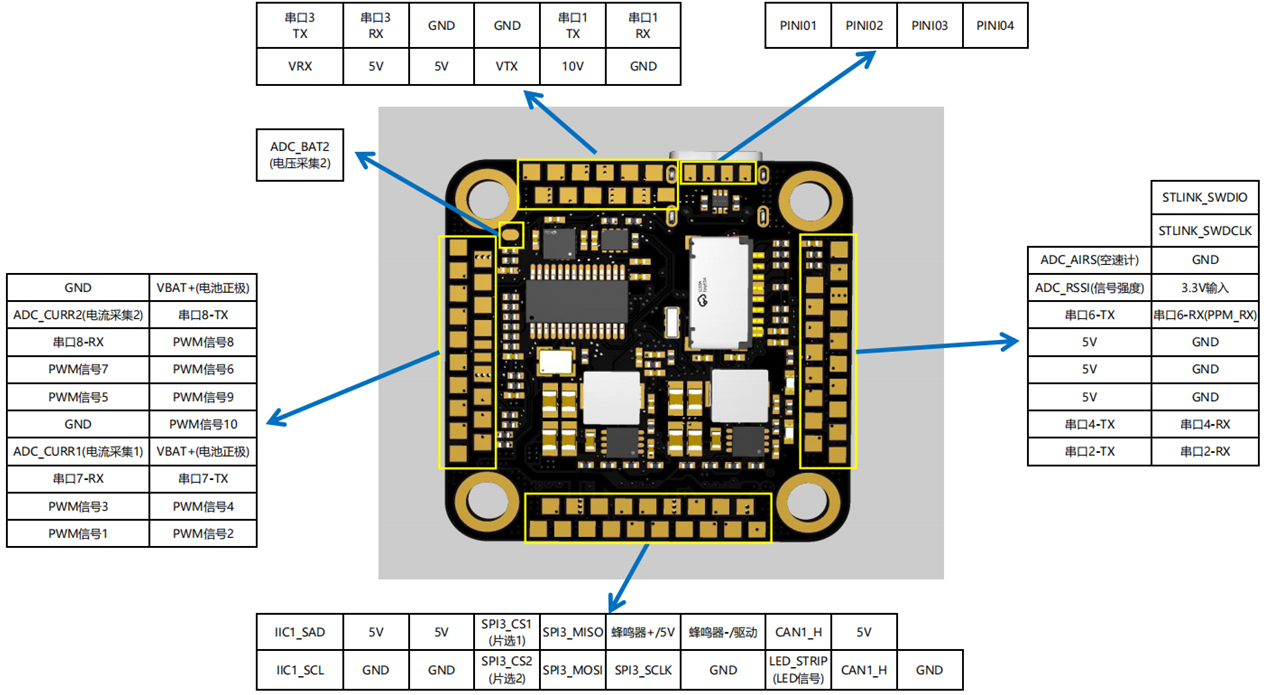
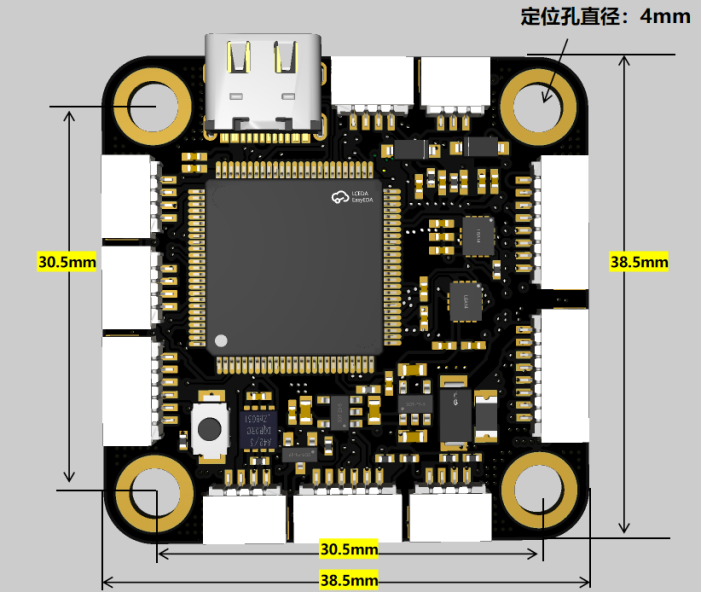
飞控尺寸图
定位孔间距:30.5 * 30.5mm
定位孔直径:4mm
飞控板整体尺寸: 38.5(长) *38.5(宽) *7.5(高)mm
板卡重量:10g
接线示意图
固件获取与编译
- WFG100飞控已完成对APM、BF、INAV、PX4固件的适配,请到固件清单页面进行下载。
- 如用户需要自行编译固件,请查阅固件编译说明!
APM固件串口号映射表
| 飞控Serial号 | 默认串口功能 | 对应单片串口号 | 源码配置 |
|---|---|---|---|
| Serial1 | MAVLink2(接电台) | USART6 | |
| Serial2 | MAVLink2(接电台) | USART1 | |
| Serial3 | None(空,未预设功能) | USART2 | |
| Serial4 | GPS | USART3 | |
| Serial5 | None(空,未预设功能) | UART8 | |
| Serial6 | None(空,未预设功能) | UART4 | |
| Serial7 | RC_IN(遥控器信号输入) | UART7 |
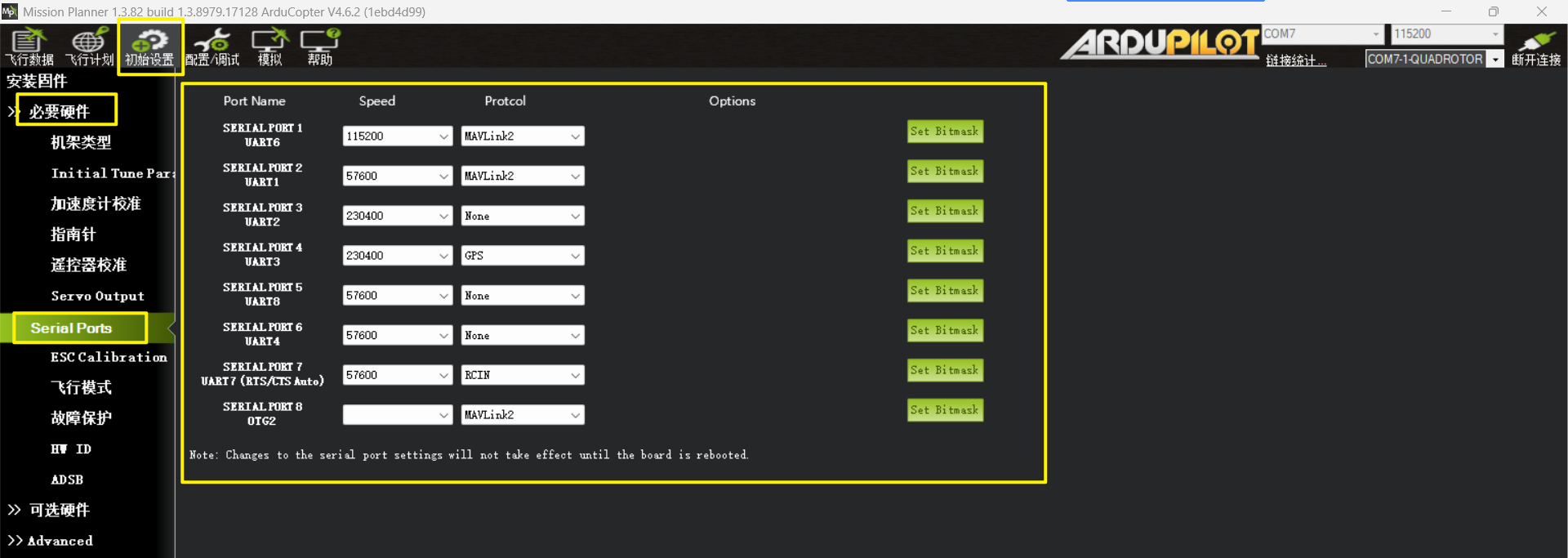
在APM固件中,大家也无需记忆映射关系表,只需将Missionplanner地面站更新至1.3.82以上,在初始设置页面→Serial Ports页面,即可查看对应关系表,
同时还可以对每个串口的功能、波特率、通信属性进行全部预览,如下图所示:
PX4固件串口号映射表
| 飞控Serial号 | 默认串口功能 | 对应单片串口号 | 备注 | |
|---|---|---|---|---|
| ttyS0 | SERIAL_TEL1(可接电台) | USART1 | CONFIG_BOARD_SERIAL_TEL1="/dev/ttyS0" | |
| ttyS1 | GPS2(PX4支持2个GPS) | USART2 | CONFIG_BOARD_SERIAL_GPS2="/dev/ttyS1" | |
| ttyS2 | GPS1(PX4支持2个GPS) | USART3 | CONFIG_BOARD_SERIAL_GPS1="/dev/ttyS2" | |
| ttyS3 | SERIAL_TEL2(可接电台) | USART4 | CONFIG_BOARD_SERIAL_TEL2="/dev/ttyS3" | |
| ttyS4 | RC_IN(遥控器信号输入) | UART6 | CONFIG_BOARD_SERIAL_RC="/dev/ttyS4" | |
| ttyS5 | SERIAL_TEL3(可接电台) | UART7 | CONFIG_BOARD_SERIAL_TEL3="/dev/ttyS5" | |
| ttyS6 | SERIAL_TEL4(可接电台) | UART8 | CONFIG_BOARD_SERIAL_TEL4="/dev/ttyS6" |
1) 飞控默认已支持2路串口作为GPS设备的 接入,分别对应STM32的USART2与USART3。