6、WFG100固件下载(APM/BF/PX4/INAV)
WFG100飞控四大开源固件汇总:APM有_withbl.hex等格式,BF固件是.hex格式,PX4需先烧bootloader再烧固件,INAV有.hex和.elf格式,可参考对应烧录与编译说明文档。
注意:
- APM和PX4固件可直接兼容V2版与V3版的飞控硬件;
- BF与INAV需要区分飞控硬件的版本!
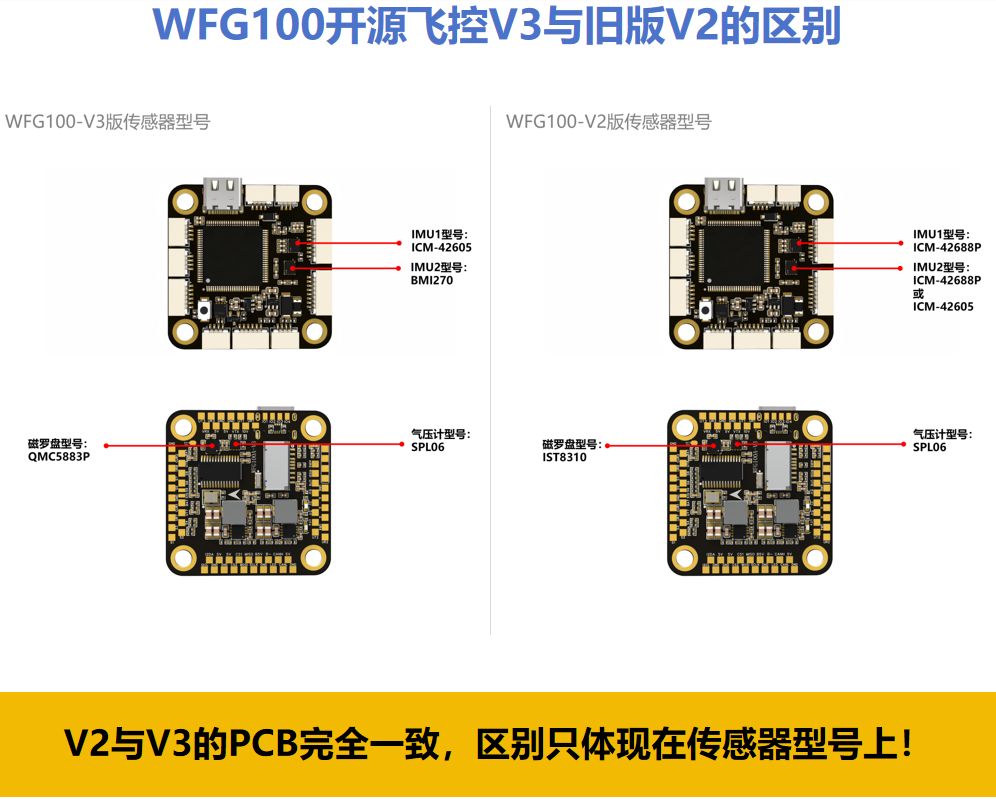
- V2版本硬件:ICM42688P(imu1) + ICM42688P/ICM42605(imu2) + SPL06(气压计) + IST8310(罗盘)
- V3版本硬件:ICM42605(imu1) + BMI270(imu2) + SPL06(气压计) +QMC5883P(罗盘)
一、WFG100飞控 - 开源固件汇总
1、APM固件汇总
APM固件建议直接烧录_withbl.hex的固件格式(因为它既有固件又包含了Bootloader)
1)APM多旋翼固件(_withbl.hex格式),优先使用以下固件。
说明:后缀为_with_bl.hex格式的APM固件,它同时包含用户程序和bootloader;因此只需通过STM32CubeProgrammer进行烧录1次即可。
2)APM的bootloader(任选1种使用STM32CubeProgrammer工具烧录即可,无论是多旋翼,固定翼,无人车的bootloader都是通用)
AP_Bootloader.bin (20.18 KB)
AP_Bootloader.hex (55.52 KB)
注意:
- 如果用户刷写了_withbl.hex格式的固件,那么飞控固件中已有bootloader了,可以直接忽略bootloader的步骤!
- 如果用户要使用Missionplanner地面站刷入.apj的固件,那么需要先烧录bootloader之后,才能正常进行烧录。
3)APM的多旋翼固件(.apj格式):
WFG100_Arducopter_4.6.3(兼容V2V3版本飞控硬件).apj (1.34 MB)
注意:此格式的固件含用户程序,但不包含bootloader;
用户需要单独先烧录bootloader之后,再才能通过missionplanner地面站进行烧录.apj格式的固件。
4)APM的多旋翼双向Dshot固件(.hex格式):普通用户可忽略,供高级用户使用!
WFG100_Arducopter_4.6.3_with_bl(bdshot版本固件-兼容V2V3硬件).hex (4.5 MB)
支持双向Dshot的固件,可支持实时回传电机转速,转速信息主要用于动态滤波器高级调优(高速穿越机)
使用AM32电调且连接S1-S4电机通道时,固件预设了以下参数,解锁后即可回传转速!
SERVO_BLH_OTYPE=5
MOT_PWM_TYPE =5
SERVO_BLH_AUTO =1
SERVO_BLH_MASK = 15 # S1、S2、S3、S4通道开启Dshot功能
SERVO_BLH_BDMASK= 15 # S1、S2、S3、S4通道通道开启双向Dshot回传功能
SERVO_BLH_OTYPE =6 # 默认为Dshot600协议,如果电调只支持DSHOT300,那么该值设置为=5
SERVO_DSHOT_ESC = 1 # AM32电调请配置为1
MOT_PWM_TYPE = 6 # Dshot600协议,如果电调只支持DSHOT300,那么该值设置为=5
SERVO_DSHOT_RATE = 2
注:
- 如果用户使用的是S5-S8电机通道作为电机通道,需要将SERVO_BLH_MASK改为 = 240、SERVO_BLH_BDMASK改为 =240
- 如果电调不支持Dshot600,可降为Dshot300协议。改为Dshot300时,需将飞控参数SERVO_BLH_OTYPE改为=5,MOT_PWM_TYPE改为=5。
4)其他载具的AP固件包含:固定翼固件、巡航车(或无人车)固件、直升机固件、潜水艇固件!如下:
| 载具类型 | 固件汇总 | 备注说明 |
| 固定翼固件 |
WFG100_Arducopter_4.6.3_with_bl(兼容V2V3版本飞控硬件).hex
| 垂起飞机,请烧录固定翼的固件!然后将Q_ENABLE =1就是开启AP的垂起功能! | ||
| 无人车/船固件 | WFG100_APM4.6.3_无人车(船)固件.zip (3.44 MB) | 固件请下载压缩包,解压后,即可获得.hex 及 .apj的固件! |
| 潜水艇固件 | WFG100_APM4.5.0_潜水艇固件.zip (5.43 MB) | |
| 直升机固件 | WFG100_APM4.6.3_直升机固件.zip (4.88 MB) |
2、PX4固件汇总
PX4固件需先烧录bootloader,再烧录PX4固件!
| 烧录顺序 | 烧录文件 | 备注说明 |
| 先烧录bootloader | 1)PX4的bootloader(V1.16稳定版) | 说明:.elf格式是带有地址的格式,需通过stm32cubeprog工具进行烧录。 |
| 再烧录固件 | 2)PX4的固件(.elf格式)---(V1.16稳定版) | |
| PX4固件烧录以后,必须插入一张FAT32格式化后的TF卡。首次插卡开机,装上卡上电后,先等待个10多秒(直到LED灯开始闪烁),此期间飞控会把一些文件夹配置到TF卡上。另外要注意:飞控的各个参数也会保存到TF卡上,开机上电时MCU会从TF卡中,将各个参数读取到内存上!所以,使用PX4固件的时候,大家一定要插卡!! | ||
PX4固件较好的一点是:
它能一个固件就包含旋翼、直升机、固定翼、车等多种类型,只需在地面站设置一下即可变更载机类型;而APM固件,则是一种载机类型就得编译一种固件。
3、BF固件汇总
BF固件只有.hex的格式,可以通过BF地面站烧录、也可通过STM32cubeprogrammer工具直接进行烧录!
| 硬件版本 | BF固件版本 | 备注说明 |
| V2版飞控硬件 | 4.5.3版本固件:betaflight_4.5.3_STM32H743_WFG100.hex (1.43 MB)2025.12.0版本固件:betaflight_4.6.0_STM32H743_WFG100(修复GPS无法识别的BUG).hex (1.49 MB)2025.12.1正式稳定版固件(建议使用此固件 ):betaflight_2025.12.1(正式版)_STM32H743_WFG100(适配V2版硬件).hex (1.5 MB)2025.12.2测试版本固件:betaflight_2025.12.2-alpha_STM32H743_WFG100_(适配V2版硬件).hex (1.5 MB)2026年1月6日编译的Master版固件:betaflight_2026.6.0-alpha_STM32H743_WFG100(适配V2版硬件).hex (1.5 MB) | 4.5.3版本固件需要用10.10.0版的PC端软件进行调参,下载链接由于BF地面站官方的技术路线出现重大变更,4.5.3以后的BF固件,都需要通过BF网页版地面站才能进行连接与调参!后续不会再有PC版软件发布,所以大家如果要玩BF固件就要逐步习惯BF网页版地面站! |
| V3版飞控硬件 | 2025.12.0版本固件:betaflight_2025.12.0-beta_STM32H743_WFG100_(适配V3版本硬件).hex (1.49 MB)2025.12.1正式稳定版固件:betaflight_2025.12.1_(正式版)STM32H743_WFG100(适配V3版本硬件).hex (1.49 MB)2025.12.2测试版本固件:betaflight_2025.12.2-alpha_STM32H743_WFG100(适配V3版本硬件).hex (1.49 MB)2026年1月6日编译的Master版固件:betaflight_2026.6.0-alpha_STM32H743_WFG100(适配V3版本硬件).hex (1.49 MB) |
4、INAV固件汇总
| 硬件版本 | 固件版本 | 备注说明 |
| V2版飞控硬件 | 1)INAV8.0.1正式版固件WFG100_INAV_8.0.1.hex (1.76 MB)WFG100_INAV_8.0.1.elf (8.96 MB)2)INAV9.0.0-RC4预发布版本固件WFG100_INAV_9.0.0-RC4.elf (9.07 MB)WFG100_INAV_9.0.0-RC4.hex (1.78 MB) | 说明:.hex格式是带有地址的固件格式,可通过stm32cubeprog.html工具进行烧录、也可以通过INAV地面站8.0.1或INAV地面站9.0.0进行烧录!说明:.elf格式是带有地址的固件格式,只能通过stm32cubeprog.html工具进行烧录。 |
| V3版飞控硬件 | INAV9.0.0-RC4预发布版固件WFG100_INAV_9.0.0-RC4(适配V3版飞控硬件).elf (9.05 MB)WFG100_INAV_9.0.0-RC4(适配V3版飞控硬件).hex (1.78 MB) |
二、如何烧录PX4、APM、BF、INAV固件?
详见飞控固件烧录说明
三、如何拉取官方源码,自己编译固件?
编译APM固件:详见《WFG100飞控APM固件编译说明》
编译BF固件:详见《WFG100飞控BF固件编译说明》
编译PX4固件:详见《WFG100飞控PX4固件编译说明》
编译INAV固件:详见《WFG100飞控INAV固件编译说明》