8、WFG100飞控正反面安装方向调整
前言
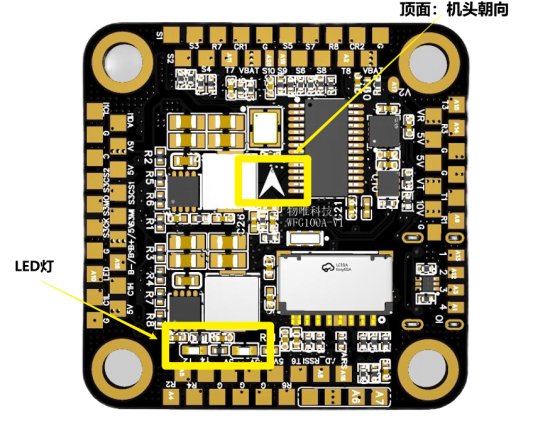
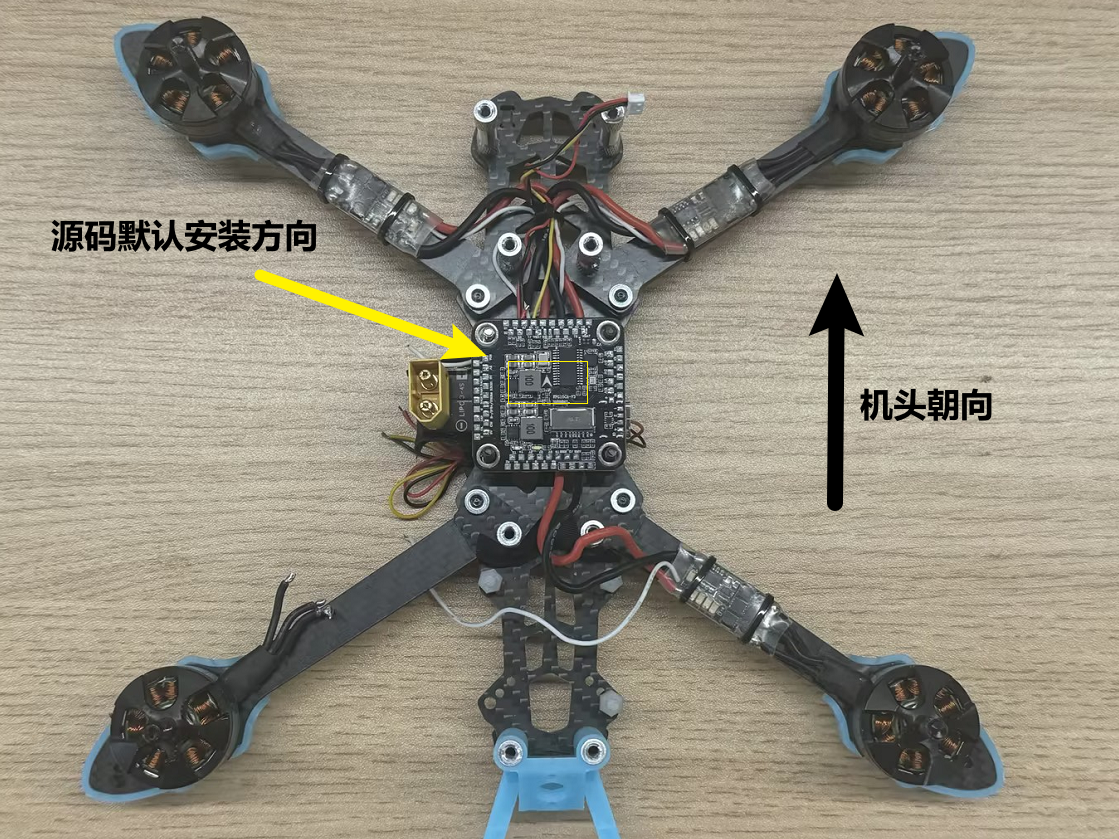
为了统一WFG100A飞控的安装方向,因为我们在AP、PX4、INAV、BF四个飞控固件的源码中默认将有LED灯、有焊盘的一面,作为飞控的顶面。
如下图所示:
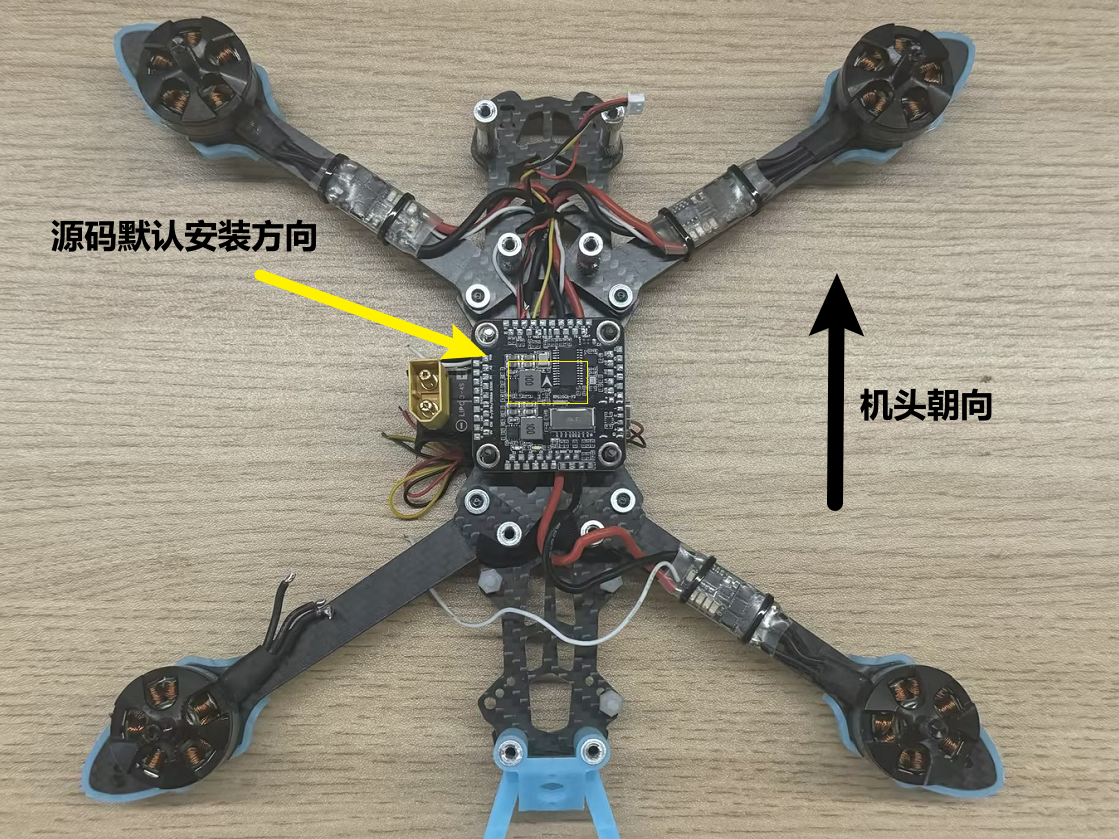
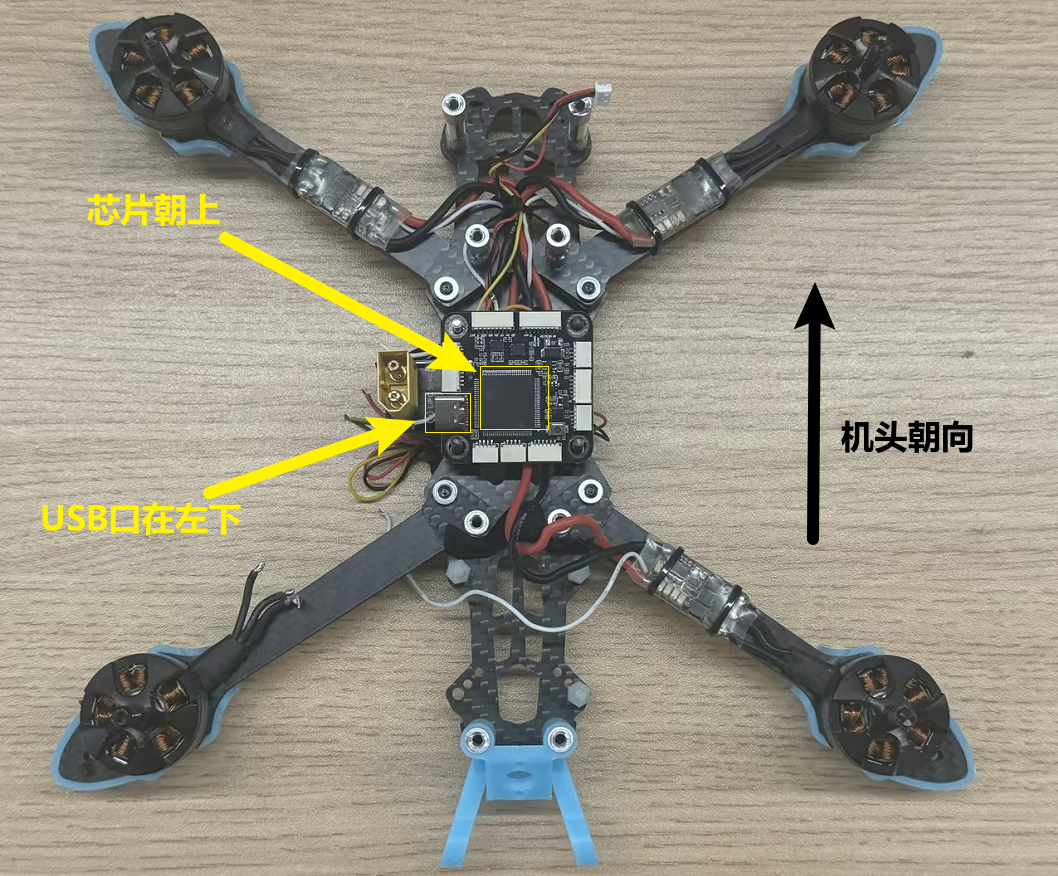
但是有一些朋友可能需要改为STM32主控朝上的一面进行安装,下面讲解一下具体的设置方法:
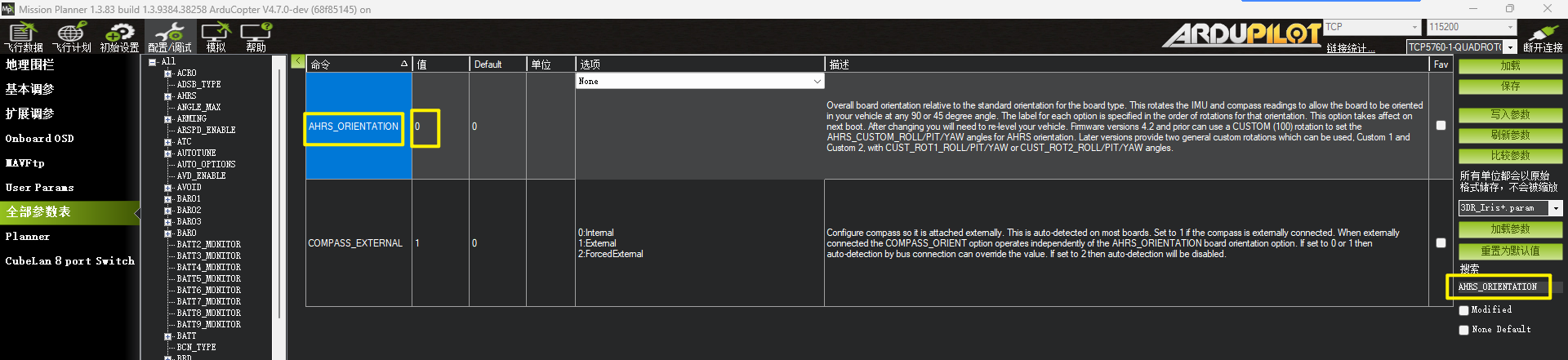
1、AP固件安装方向修改
焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
将
| 将
|
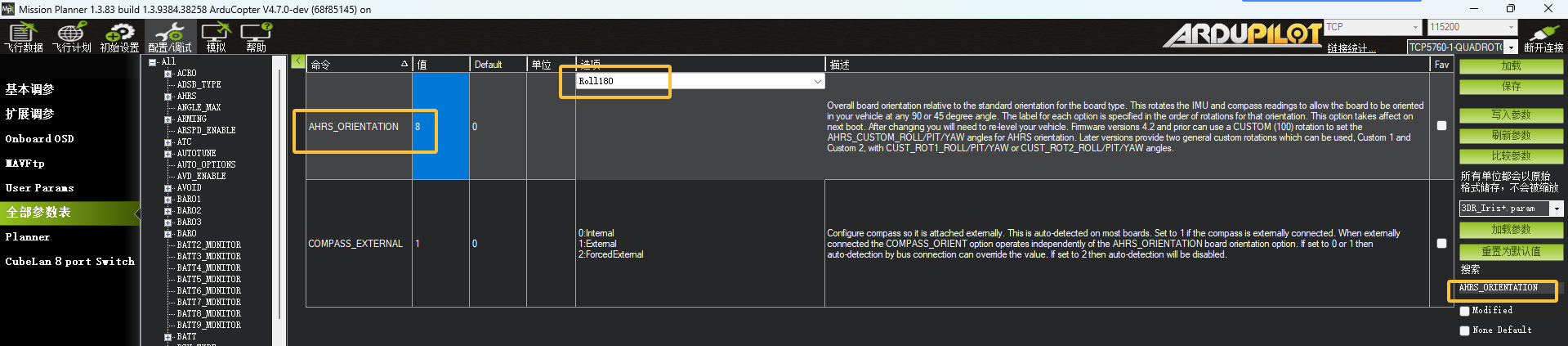
注:在AP固件中,调整航姿方向后,内置罗盘的方向会自动调整,因此无需单独调整内置罗盘的朝向!
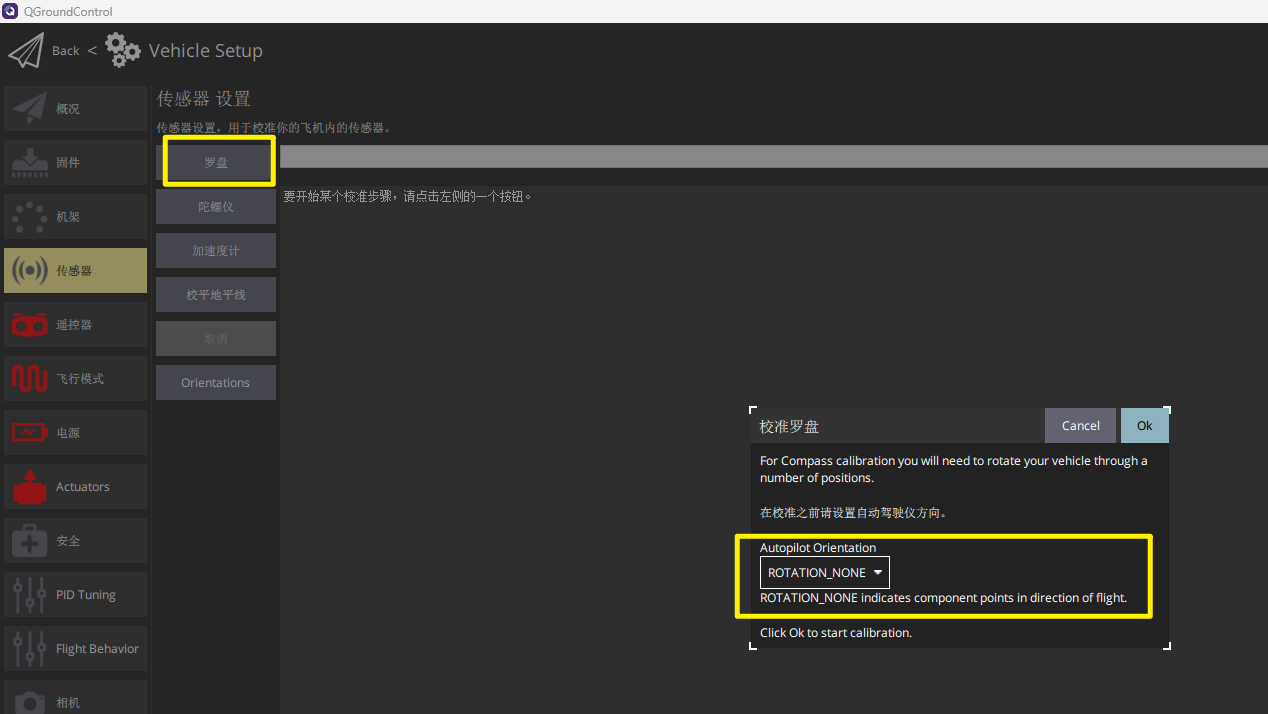
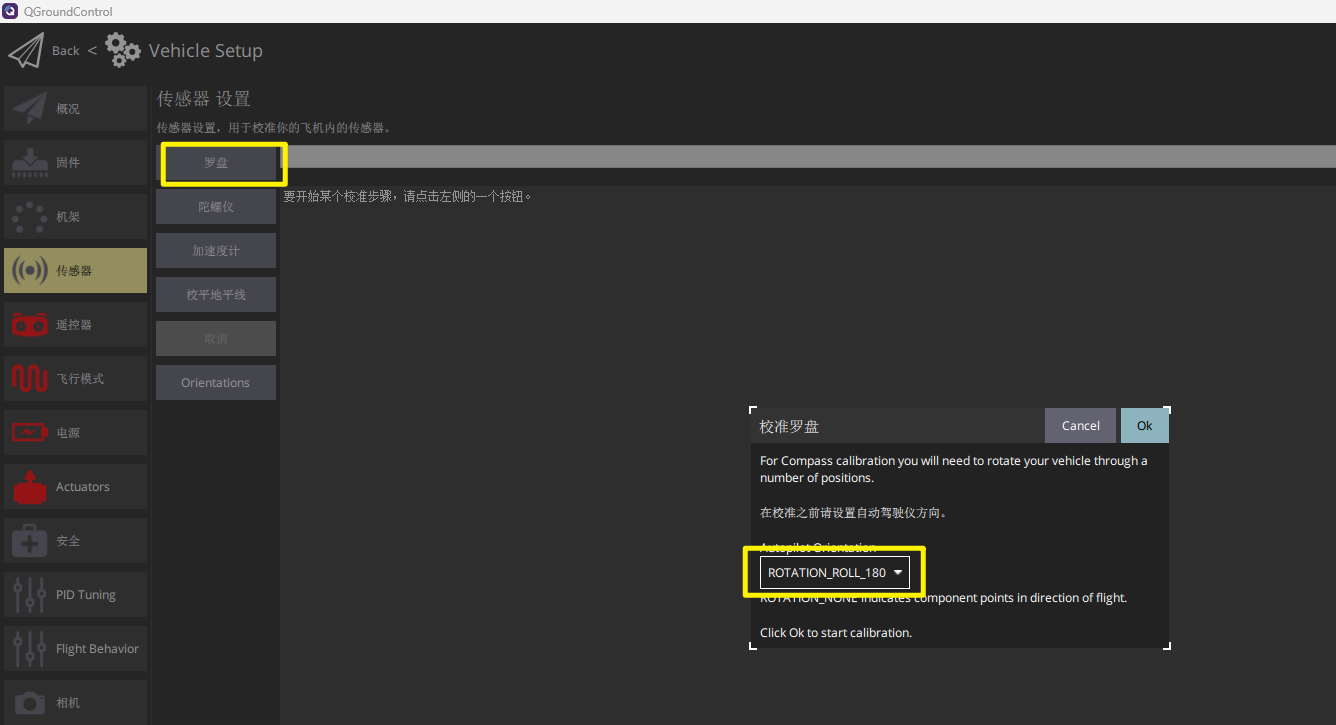
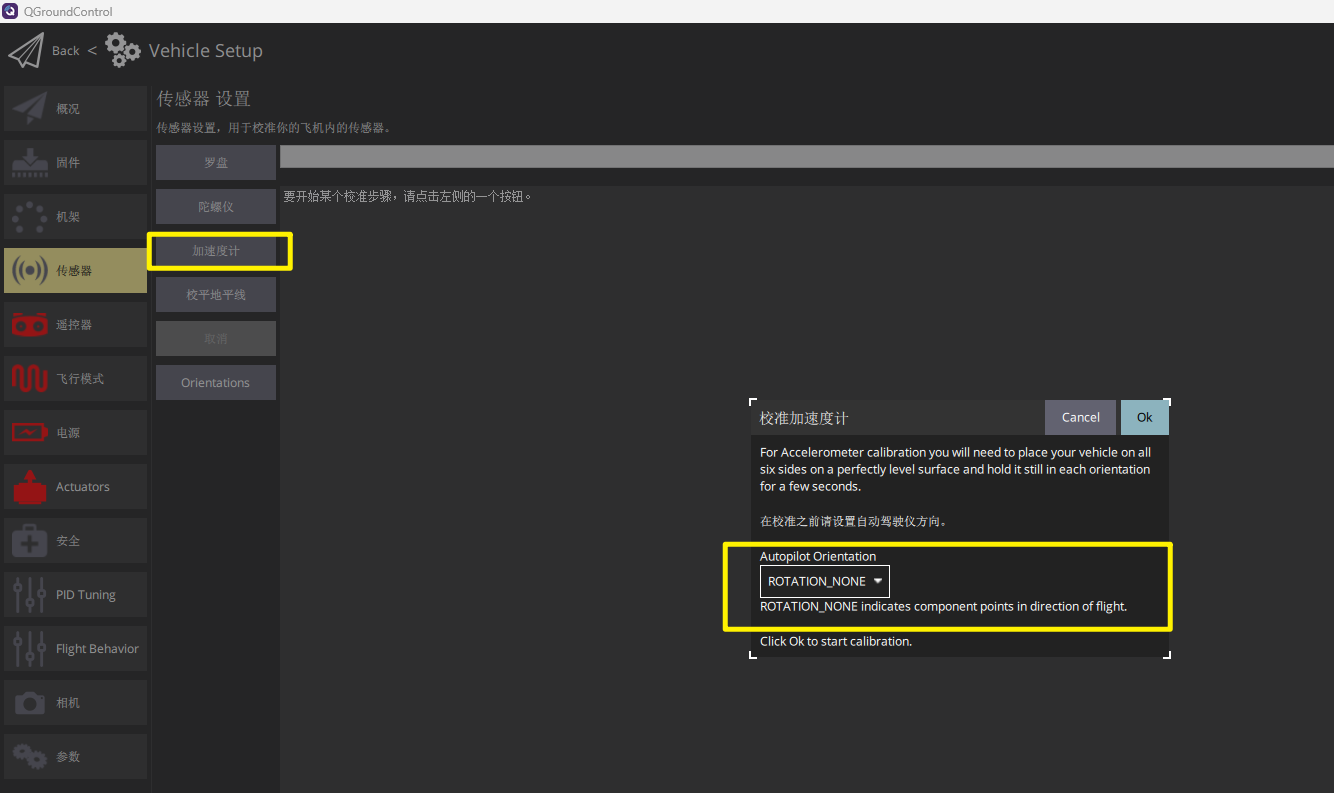
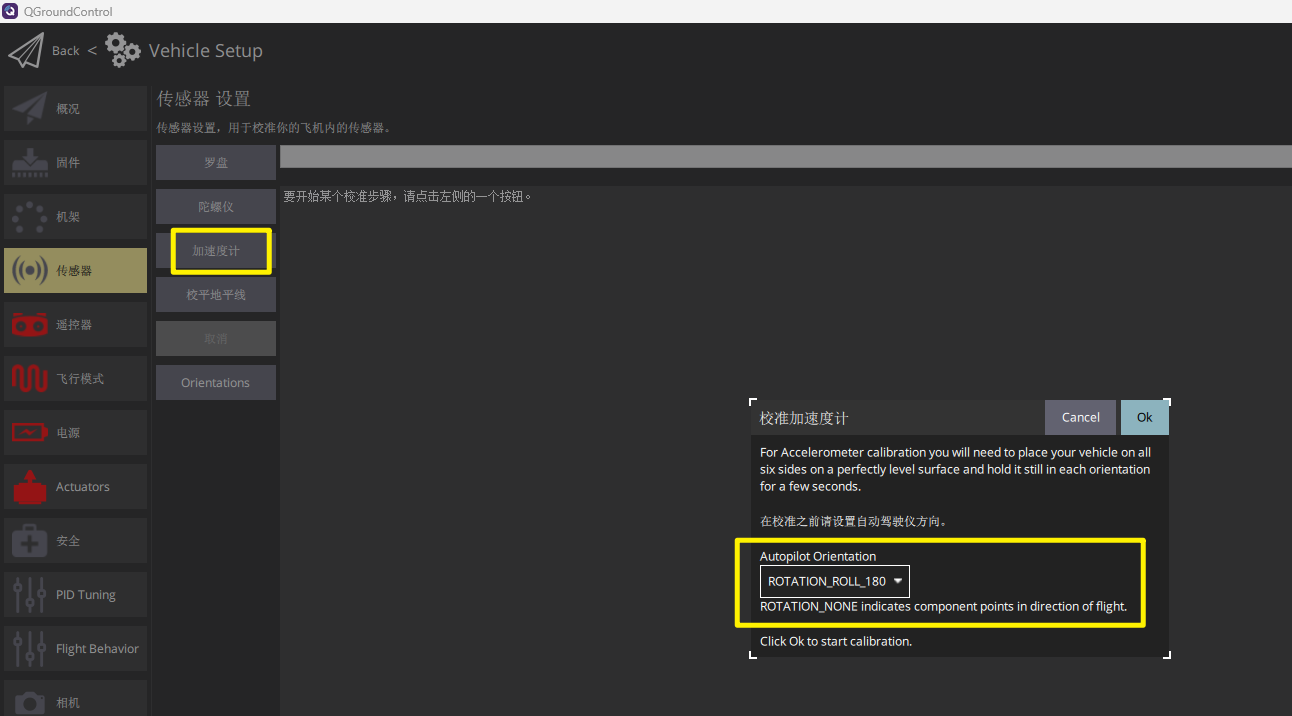
2、PX4固件安装方向修改
安装图示 | 焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
罗盘朝向 调整 |
|
|
加速度计 朝向 |
|
|
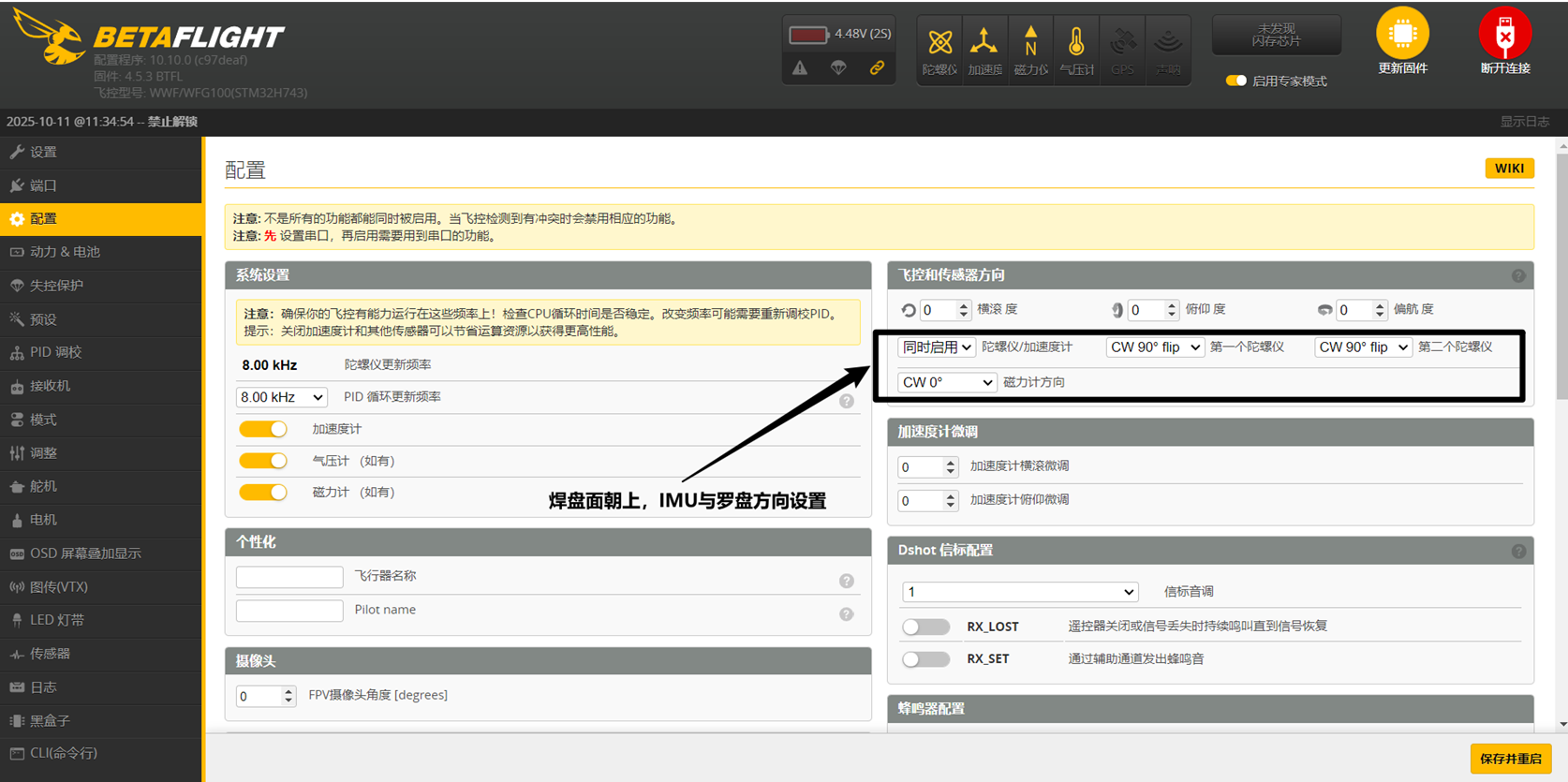
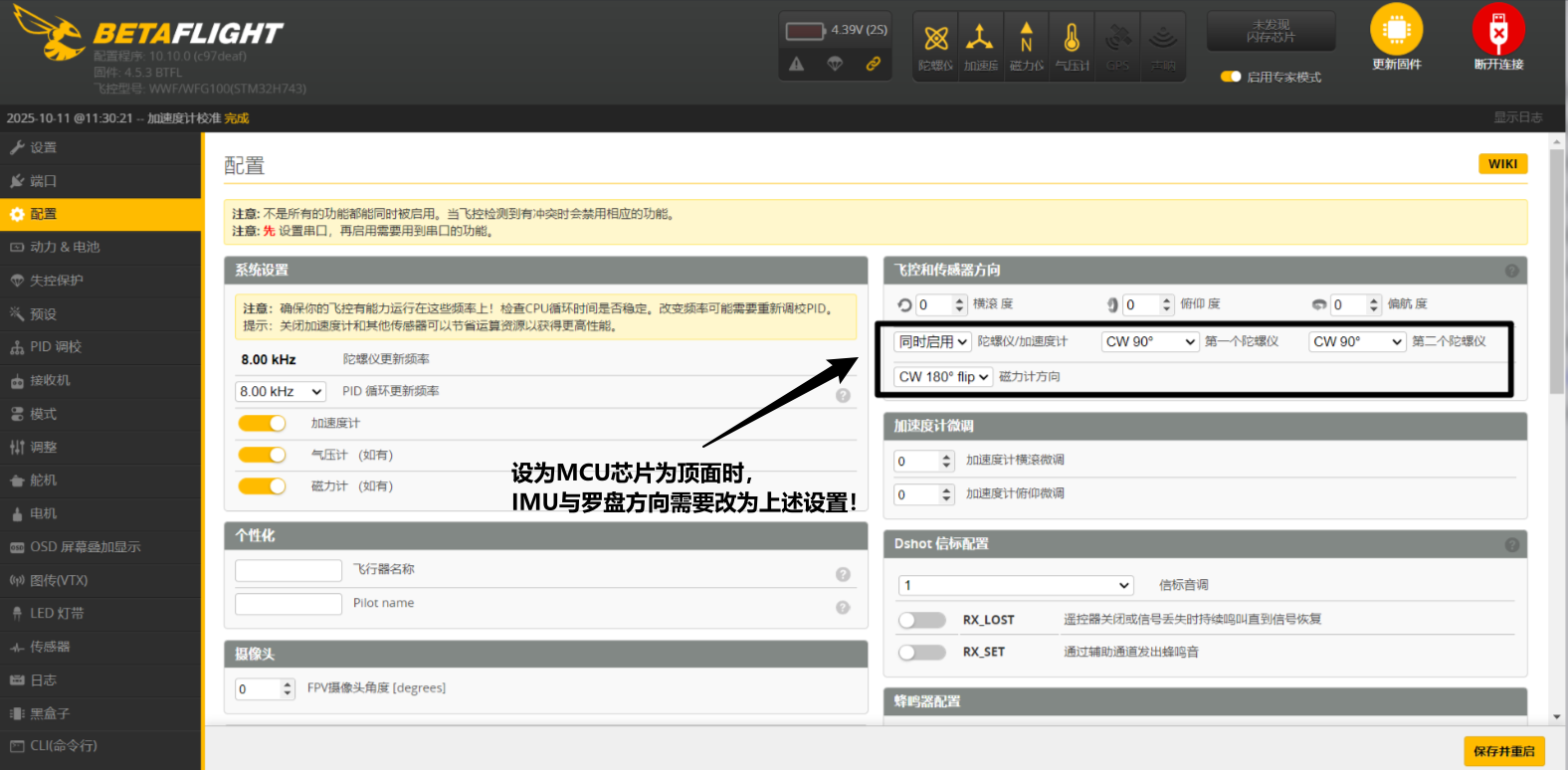
3、BF固件安装方向修改
V2版硬件:ICM42688 + ICM42688、IST8310,飞控安装方向的修改如下:
V2版本硬件 BF方向调整 | 焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
在4.5.3PC版地面站中 |
|
|
4.6.0版本固件 网页版地面站 |
|
|
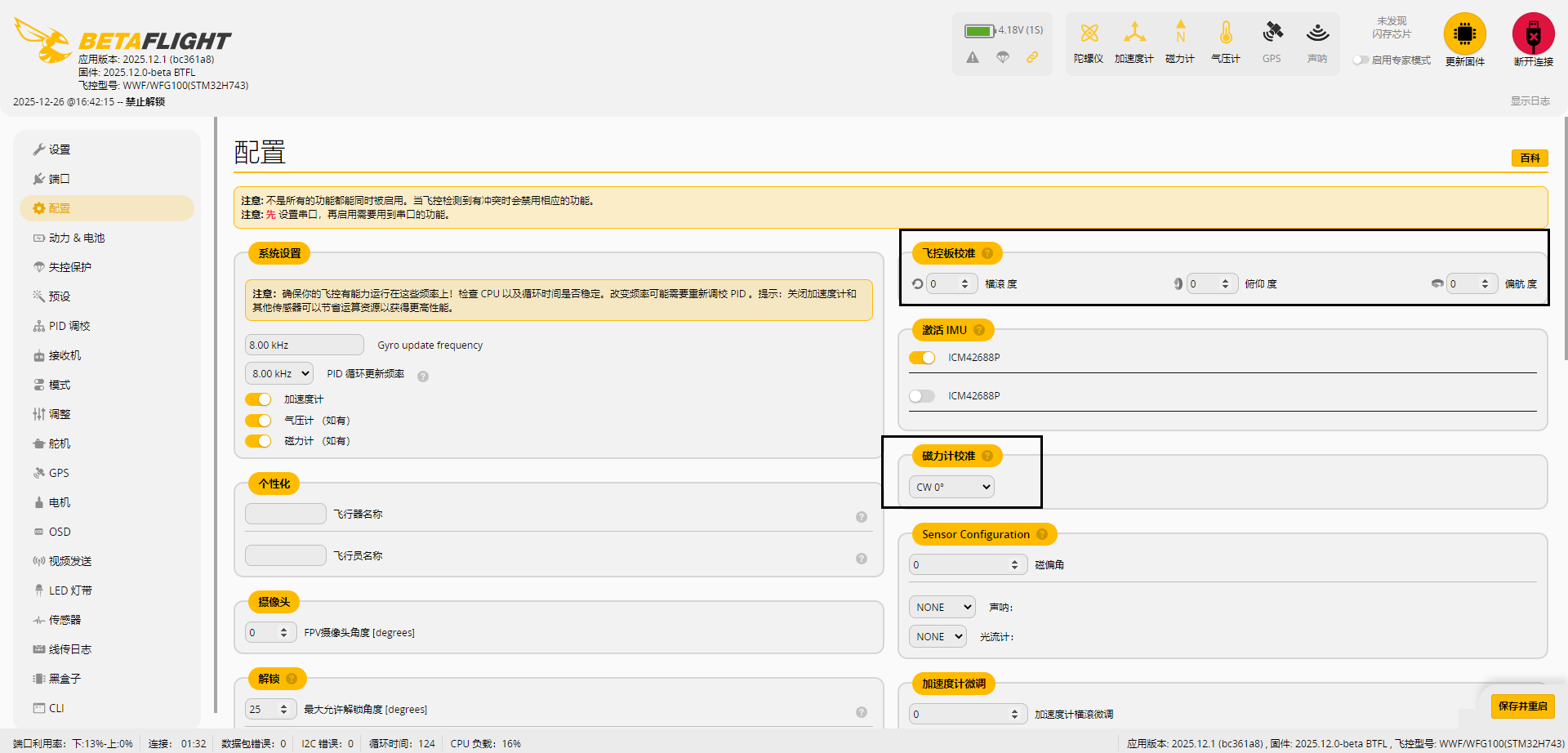
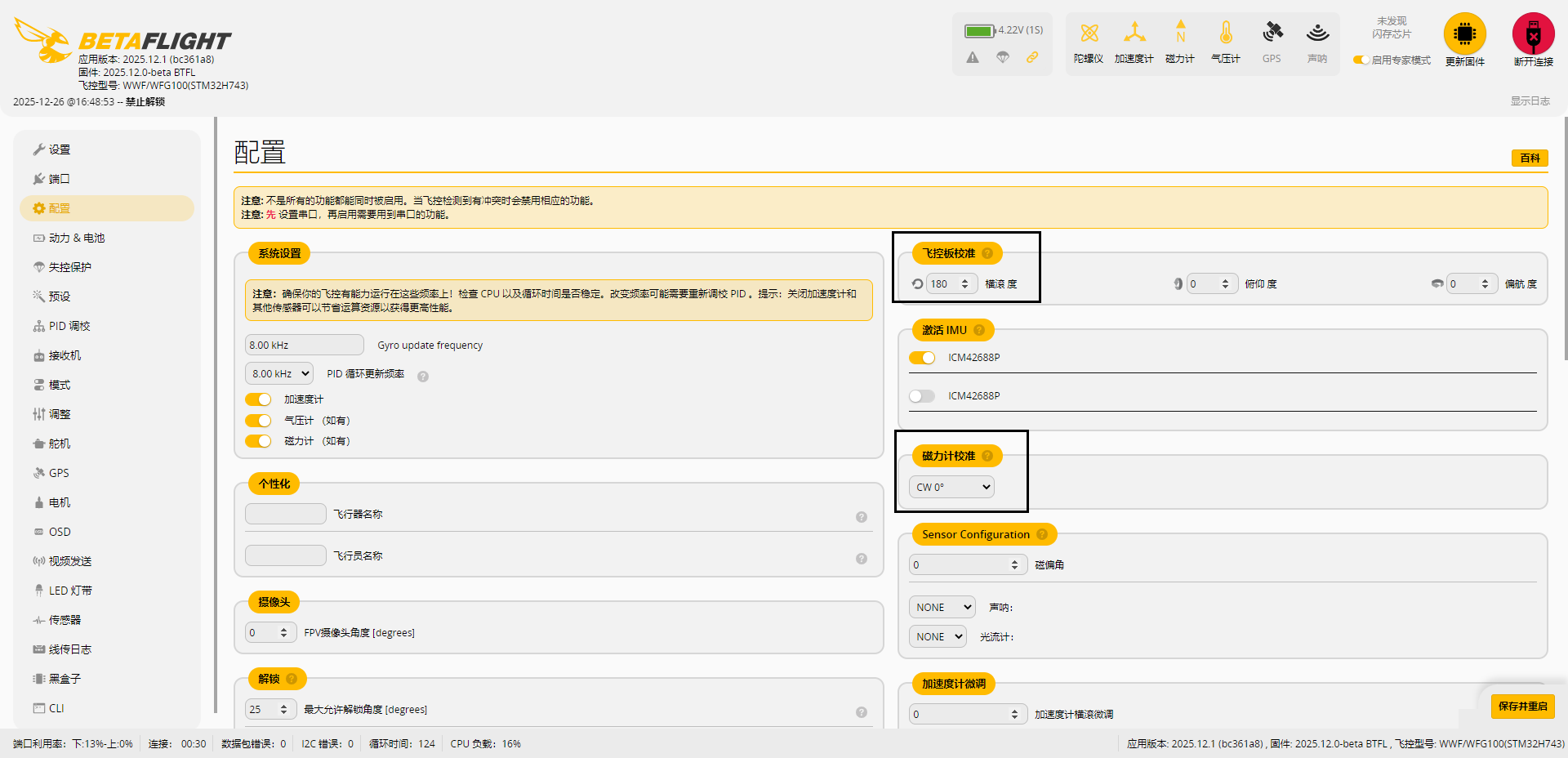
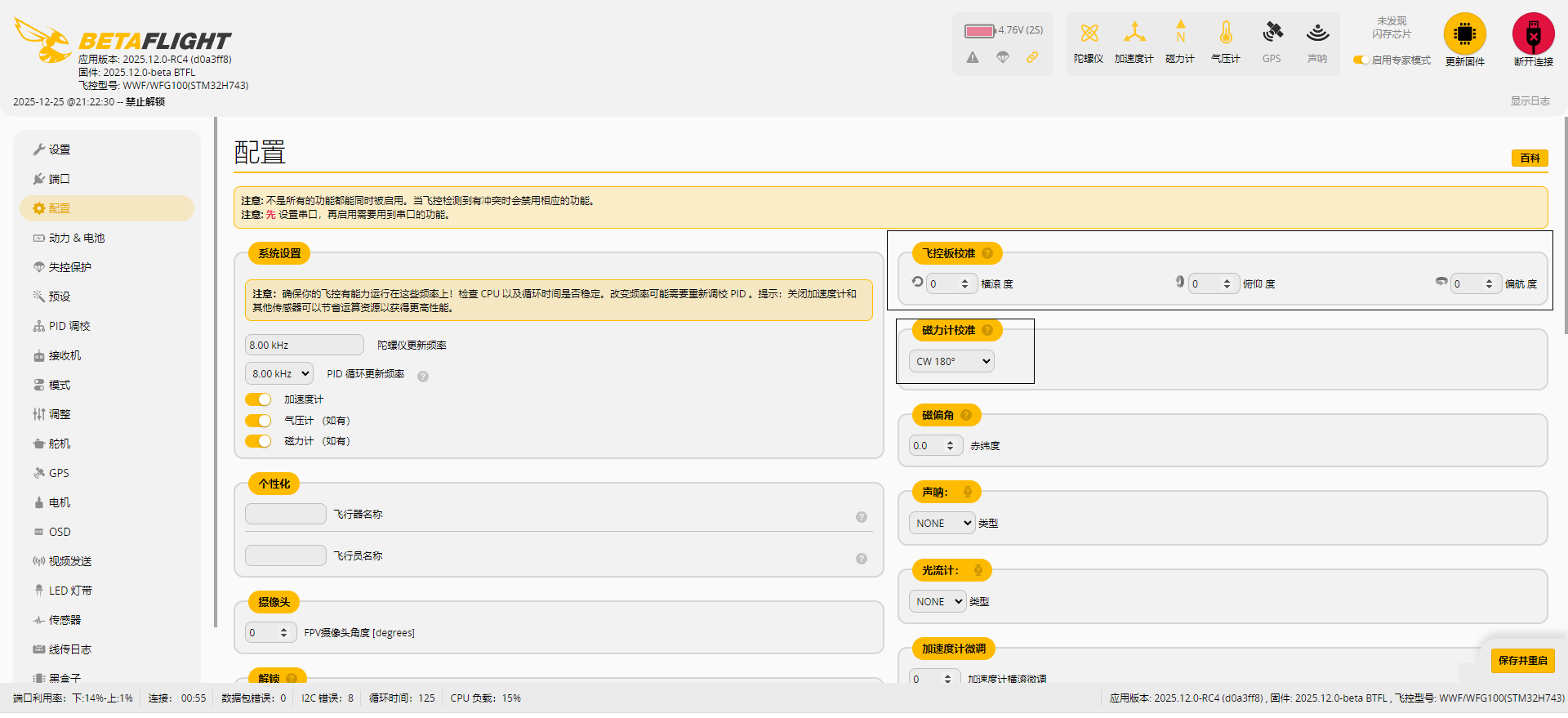
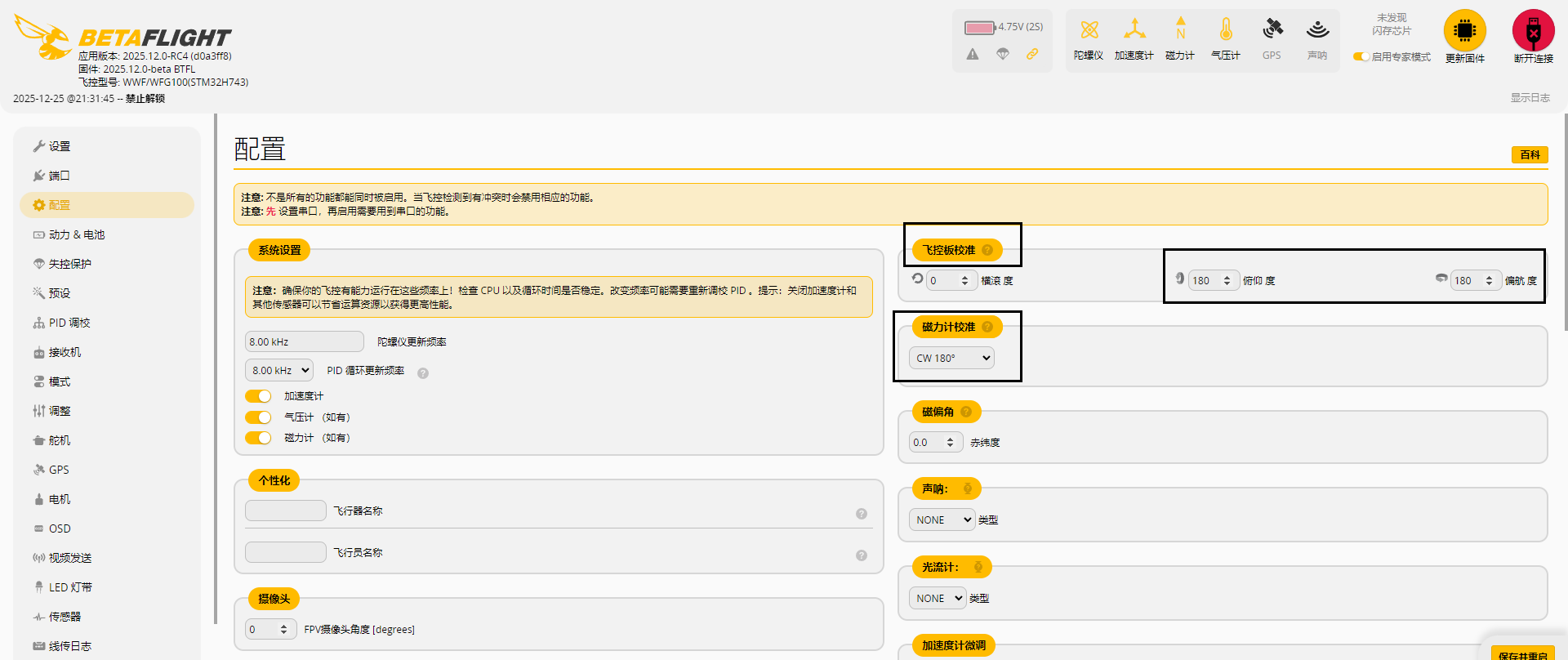
V3版硬件:ICM42605+BMI270、QMC5883P,飞控安装方向的修改如下:
V3版本硬件 BF方向调整 | 焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
4.6.0版本固件 网页版地面站 |
|
|
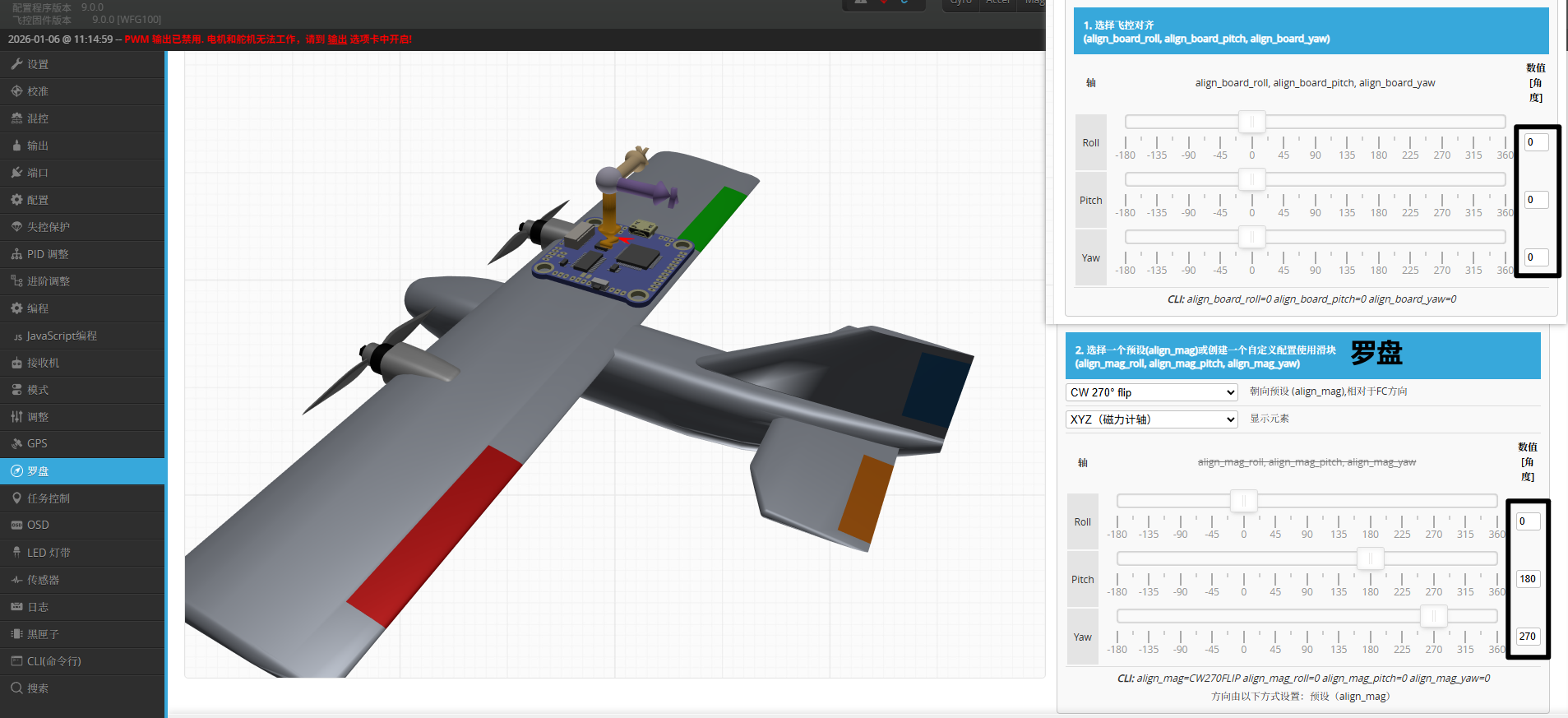
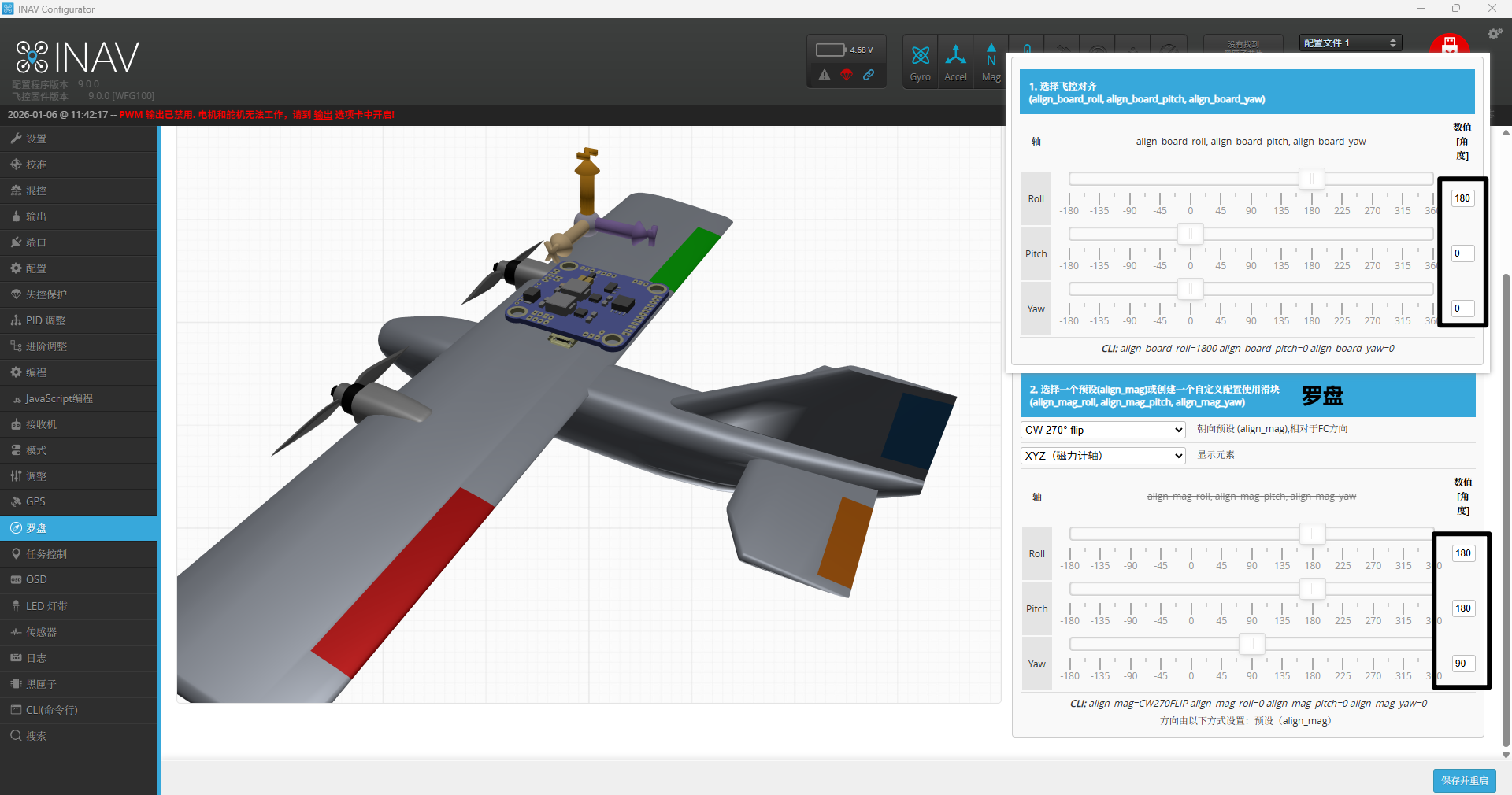
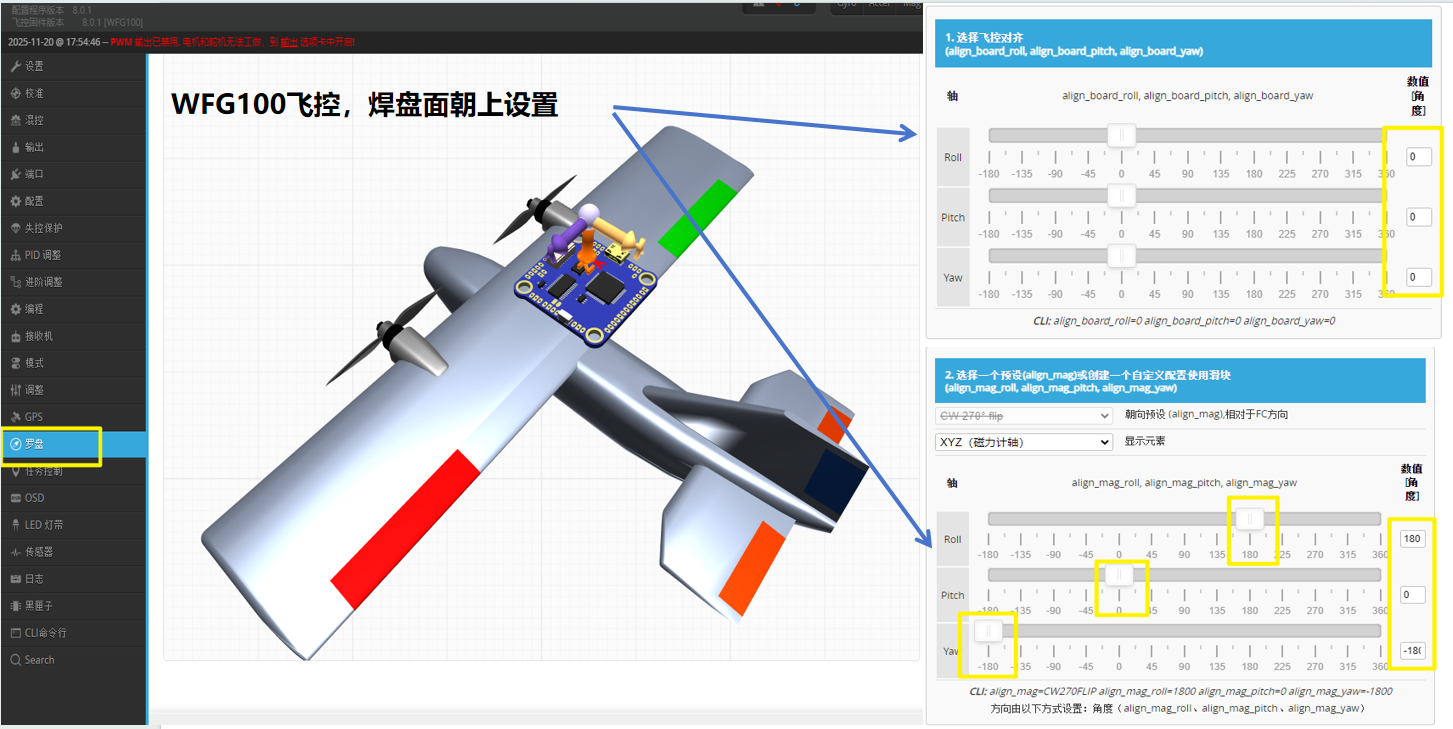
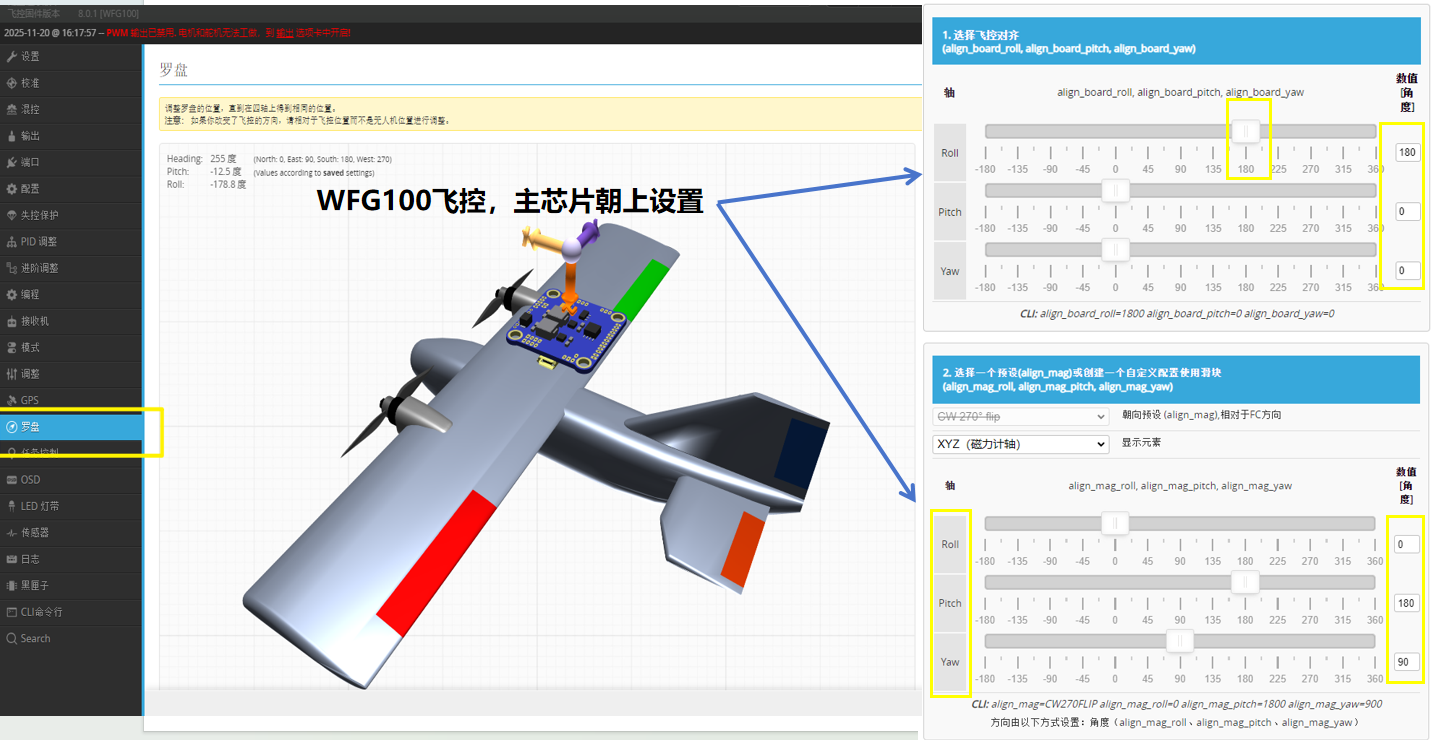
4、INAV固件安装方向修改(8.01固件)
V2版硬件:ICM42688 + ICM42688、IST8310,飞控安装方向的修改如下:
V2版本硬件 INAV 方向调整 | 焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
安装方向配置 |
|
|
V3版硬件:ICM42605+BMI270、QMC5883P,飞控安装方向的修改如下:
V3版本硬件 INAV 方向调整 | 焊盘朝上安装(固件默认的定义方向)
| 芯片面朝上安装
|
安装方向配置 |
|
|