基础设置0-选择电调的类型
一、前言 飞控板是如何驱动的无刷电机的? 首先飞控板不能直接驱动电机,飞控板需要通过一个无刷电调才能驱动电机。 飞控板上1路电调PWM输出就可以驱动1路无刷电调,无刷电调再通过3相电驱动无刷电机,其示意图如下: WFG100飞控总共有S1~...
一、前言
飞控板是如何驱动的无刷电机的?
首先飞控板不能直接驱动电机,飞控板需要通过一个无刷电调才能驱动电机。
飞控板上1路电调PWM输出就可以驱动1路无刷电调,无刷电调再通过3相电驱动无刷电机,其示意图如下:
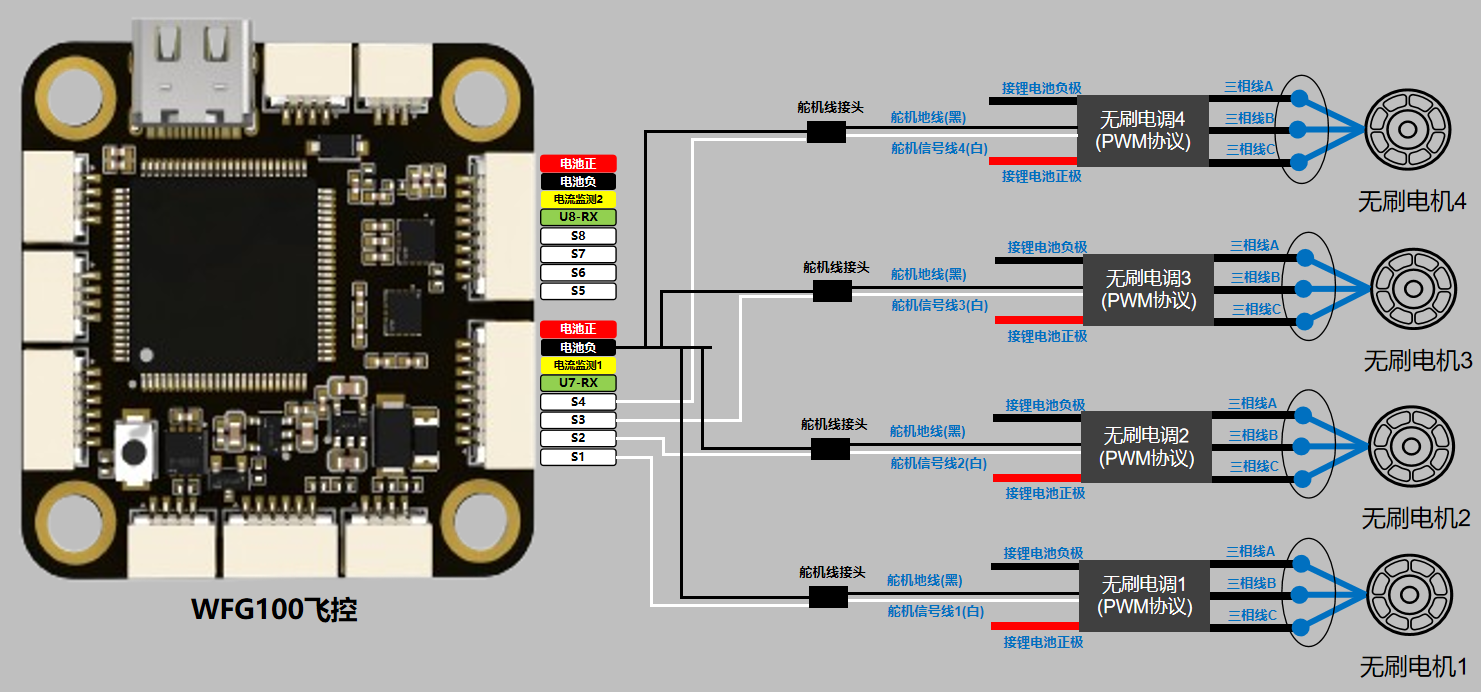
- WFG100飞控总共有S1~S8共计8路PWM信号,面对F450这种四旋翼无人机,只需要用到S1~S4的PWM通道。
- 分别将4个电调的舵机信号线与飞控S1、S2、S3、S4相连。
- 再将4个电调的舵机地线(GND)并为1根线,再与飞控的电池负相连即可!
二、常见的电调协议有3种
常见的3种电调协议有:PWM协议、CAN协议、Dshot协议(150/300/600/1200),其对比表如下:

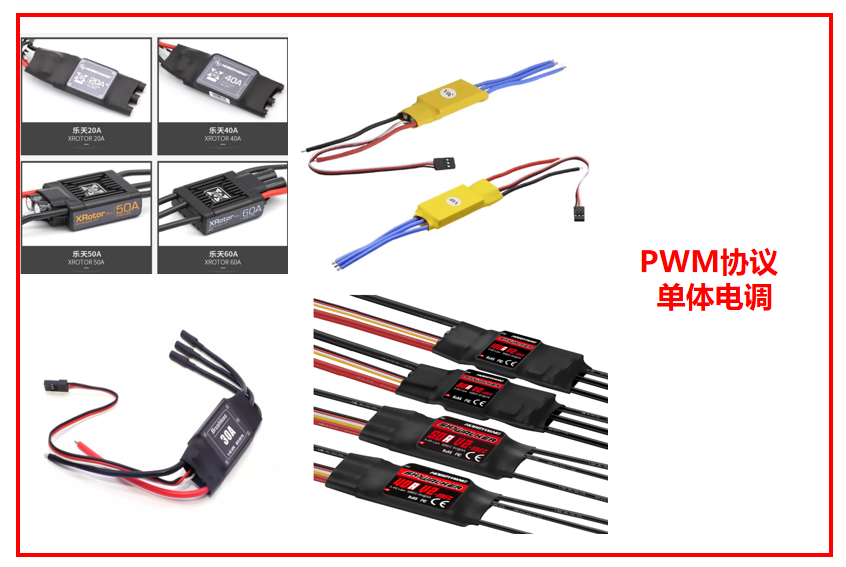
2.1、PWM协议的电调
必须做电调油门行程校准,关于油门行程的可参考:《PWM协议电调油门行程校准》
PWM协议的电调推出的时间比较早(1970年左右),像目前淘宝上销售量比较高的单体航模级电调(50-100元级别),基本都是只支持PWM协议的电调。
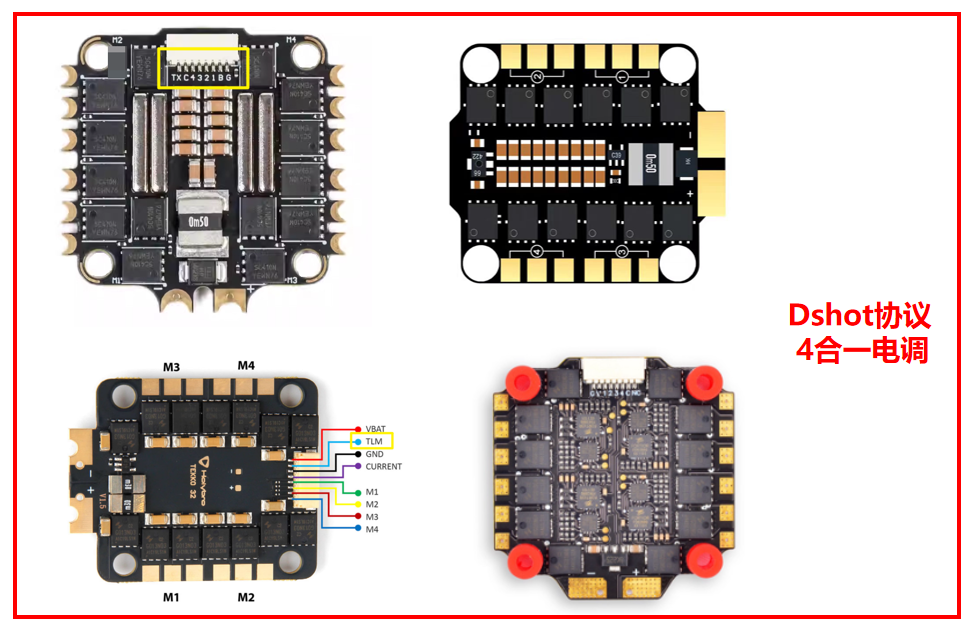
2.2、Dshot协议的电调
Dshot协议是2016年刚出的协议(无需油门行程校准,直接使用),主要是穿越机无人机/小型无人机上使用,其电调形态是4合1的小板。
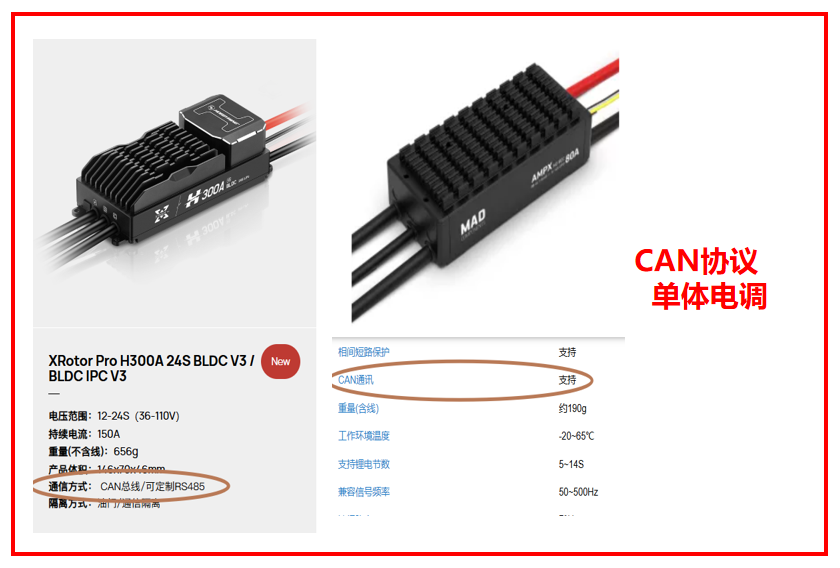
2.3、CAN协议的电调
无需油门行程校准,直接使用。CAN协议是差分协议,支持远距离走线,虽然价格昂贵但抗干扰能力强,主要用在大型/工业级无人机上!
由于大型无人机的悬停电流大,因此CAN协议的电调形态也是的单体式的居多,其外壳覆盖了厚实的散热铝片用于散热!