基础设置13-默认的PID参数设置
通过桨叶与电池电压生成基础的飞行参数
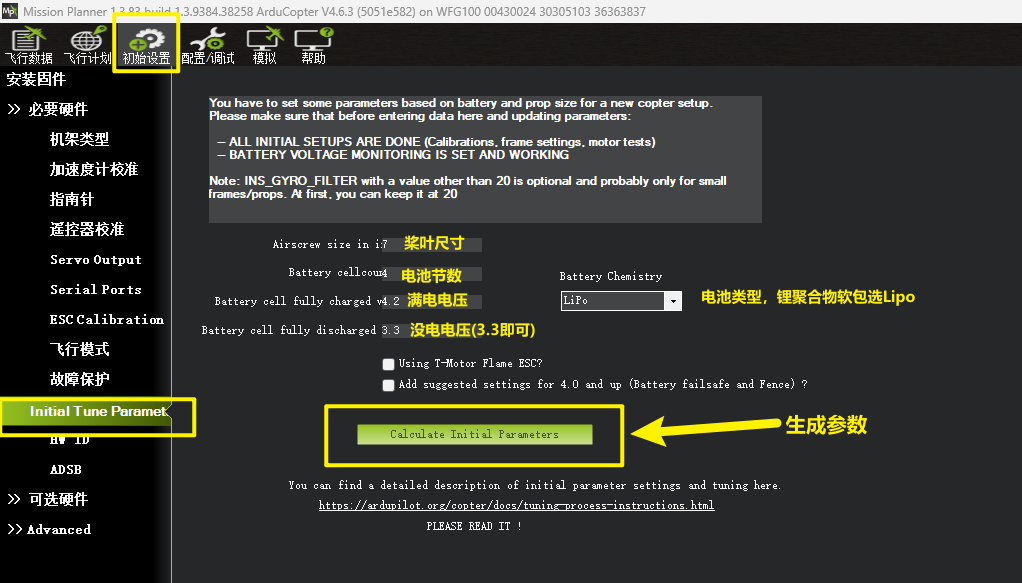
每个无人机上用的螺旋桨尺寸以及电池电压可能都不同,那么使用默认参数肯定是没有办法完全是适配的。
因此MP地面站提供了智能参数计算功能,通过输入螺旋桨尺寸、电池节数、满电电压以及放电截止电压,会智能计算相关的参数。
详情请查阅文档《根据桨叶与电池电压生成出初始PID参数》
一、F450四轴-默认PID参数与性能(供参考)
1)在烧写APM固件后,默认的PID参数基本上能够让F450无人机有非常好的悬停效果。
可实现脱悬停。(可能部分朋友的高度上会有点上下飘动定不住,需要调整一下油门死区)

2)F450默认PID参数表

二、穿越机PID-默认PID参数与性能(供参考)
APM固件的默认参数,放在部分动力强劲的穿越机上,可能会出现超调的情况。
需要进行调整。穿越机的动力非常足,因此5寸穿越机或7寸穿越机上使用AP固件时。
请务必将俯仰轴与横滚轴的P项的值下调至0.04(默认是0.135),避免起飞就超调失控!

三、使用lua脚本快速调参(调角速率环)
前提:
当无人机能够正常起飞并且安装有GPS模块能够实现定点悬停后,就可以使用lua脚本进行快速调参。
详情请查阅文档《使用lua脚本快速调整角速率环的PD项》
四、更多关于PID的调参
更多PID参数的调试,请查阅专题《APM多旋翼固件PID调试》
