舵机抛投器-外设硬件
具体的抛投指令为抛投命令DO_SET_SERVO,具详情可以直接查看本文章节5.5!
一、先看效果
1)无人机上挂载一个舵机抛投器,通过舵机转动实现对物体的抛投
2)在自动航点中关联抛投动作,实现抵达航点目标后抛投


二、认识抛投装置
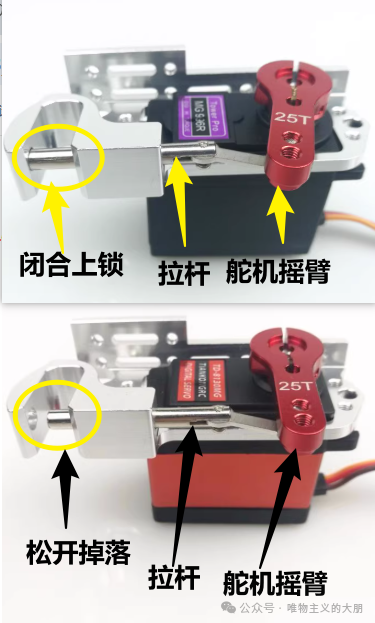
抛投装置有些朋友可能没见过,以为是很高大上的玩意。它的组成其实非常简单,由舵机、舵机摇臂、拉杆、固定舵机的结构件组成。
大家可以在某宝上搜索关键词 “舵机抛投”,虽然品类繁杂,但基本都长这么个样子,如下图所示:
抛投模块的原理:
舵机在接收到飞控输出PWM脉冲信号后,舵机会控制内部齿轮转动到对应的位置,从而带动舵机摇臂转动;舵机摇臂的转动,又会带动拉杆转动,最终实现拉杆的松开与闭合!
三、装备抛投装置
3.1 准备舵机抛投装置的材料:
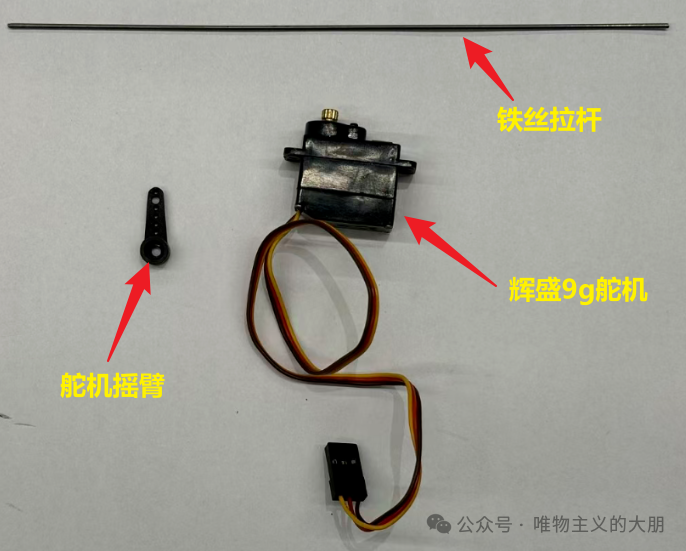
我这里仅作原理性演示,就DIY了一个简易的抛投装置。要准备关键的舵机相关的零部件有:辉盛舵机9g、舵机摇臂、铁丝拉杆。
如下图所示:
然后到拓竹的3D打印图纸社区,下载一个抛投结构件的图纸。我下载的是“专注炒面30年”大佬分享的舵机抛投模块图纸。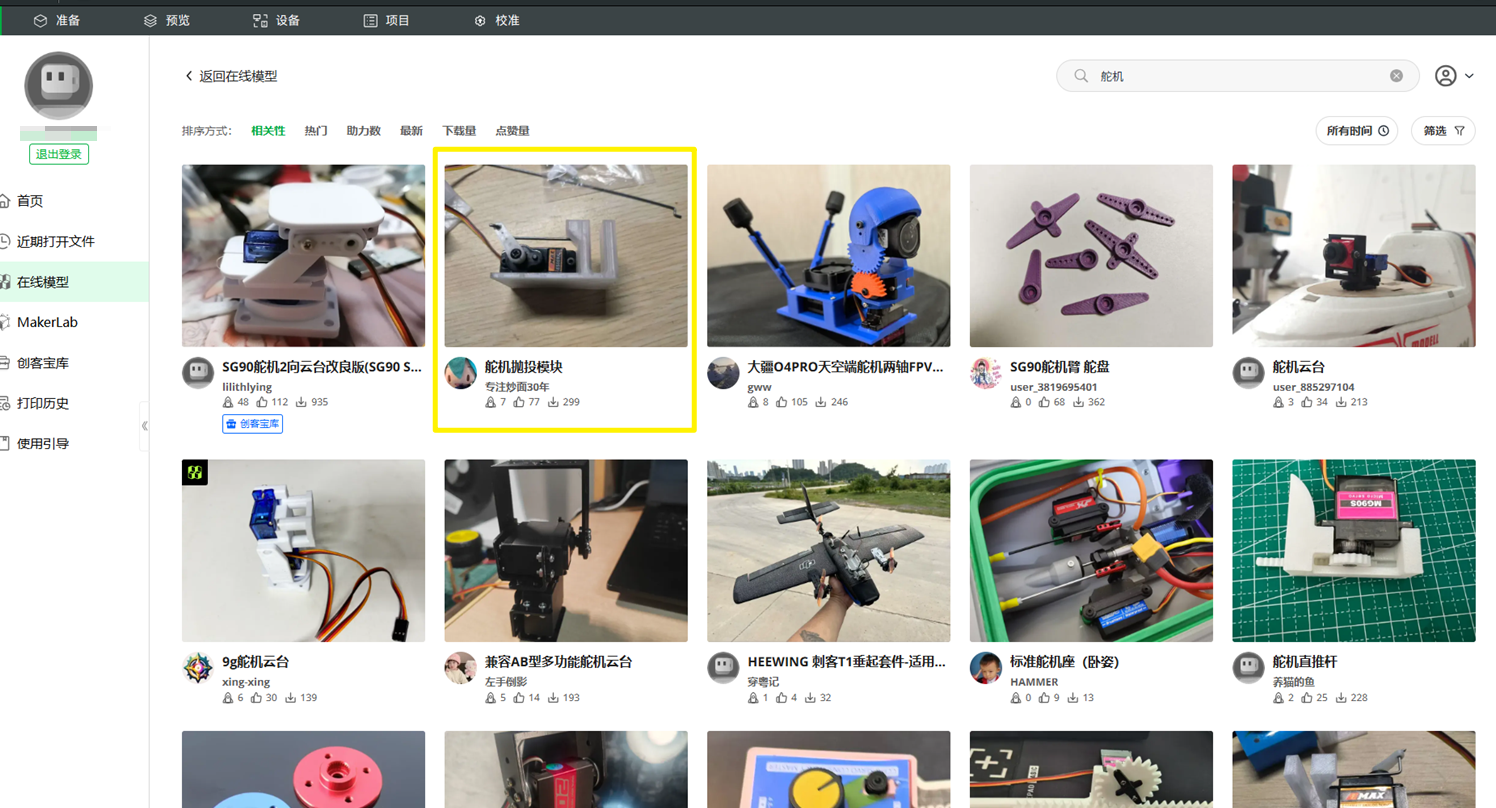
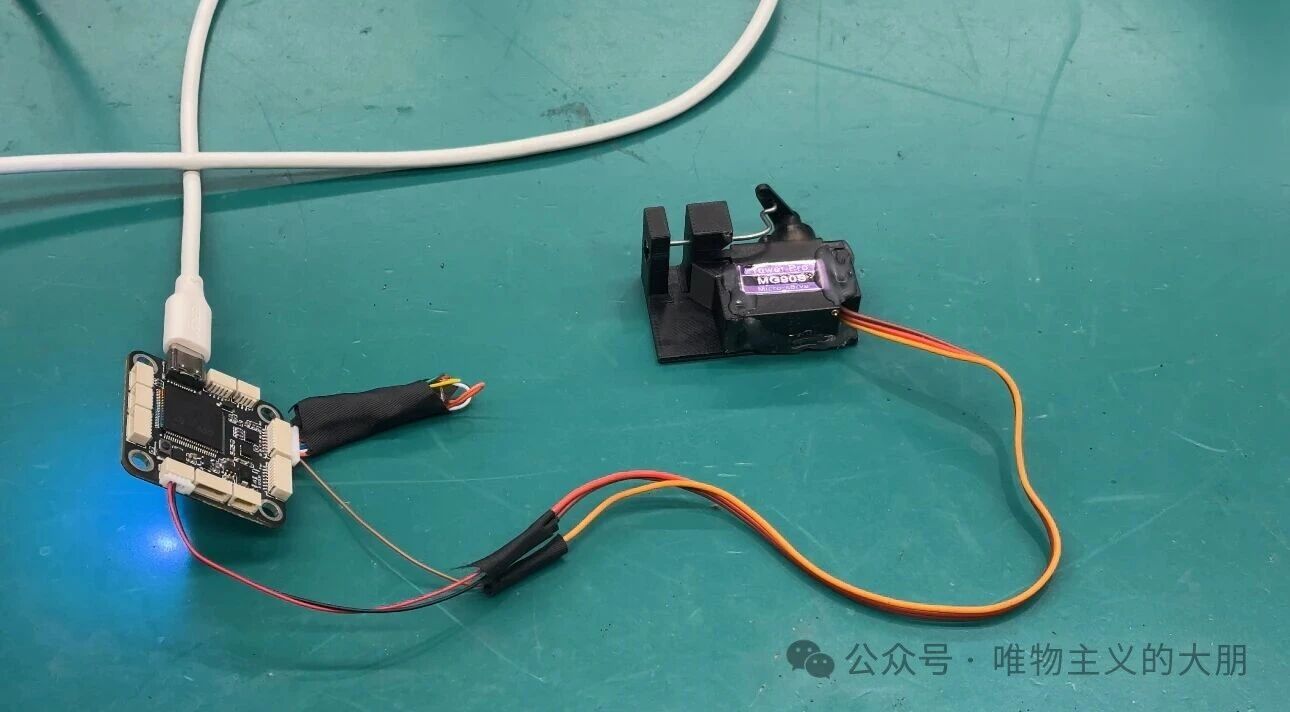
3.2 完成舵机与飞控的线束连接:
舵机上有一条3pin线,线序是GND、5V、PWM信号。这种小舵机可以直接使用飞控的端子上5V供电。如果是大扭力的舵机一定要额外独立供电,否则有可能导致舵机电流过大而导致飞控上的电源系统瞬间过载造成坠机!
此次演示,我选用飞控上的电调信号口5(S5),作为舵机的PWM脉冲控制信号,线束连接图如下:
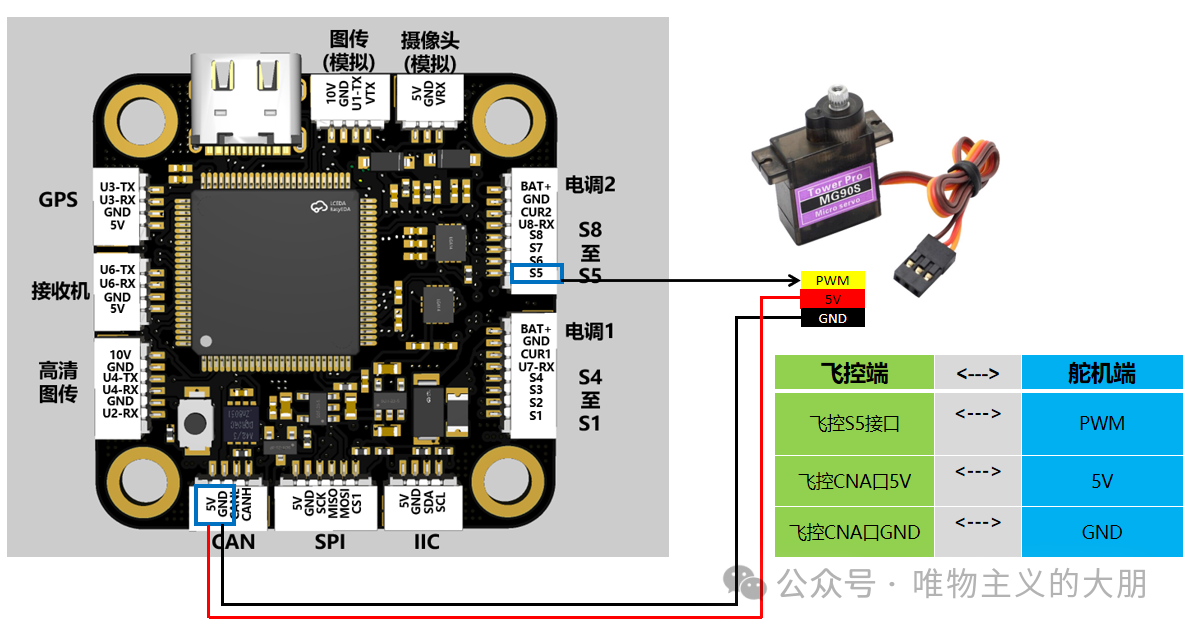
切记,如果是大舵机,请一定要使用独立电源,对舵机供电!
连接完成后,先不要安装舵机摇臂避免转动卡住!给飞控上电。正常在上电时,会听到舵机发出“吱”的一声。
3.3 通过地面站,配置飞控S5通道的参数:
1)使用USB线给飞控上电,连接飞控,打开MP地面站的全部参数。
2)因为我们使用飞控的S5电调口与舵机相连,因此需要配置飞控第5通道参数。(如是别的通道,修改对应数字即可)
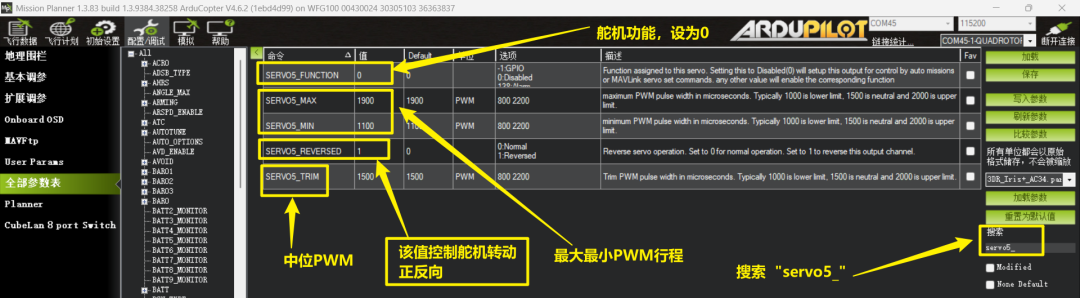
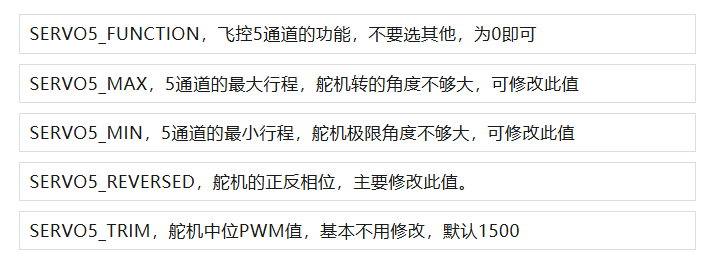
上述5个参数中,4个都保持默认即可。
唯一可能要修改是参数SERVO5_REVERSED。该参数可设0或设1,在安装舵机摇臂的时,如果反了,可通过参数,让舵机的转动角度反相!
3.4 舵机测试命令测试、安装舵机摇臂
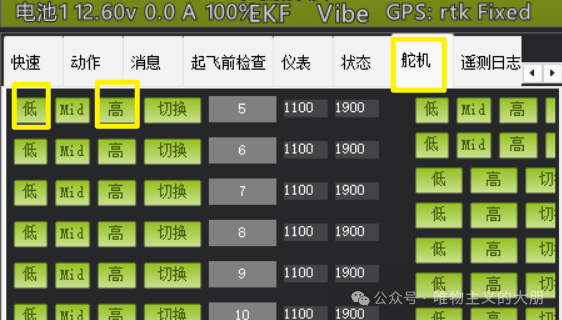
1)连接飞控后,在MP地面站中,找到 “舵机”指令页

2)舵机指令介绍

“低”对应的是1100的PWM值,点击后,舵机会转动到最低位的PWM值角度;可以在此处,直接修改PWM值,从而控制舵机的最小行程。
“高”对应的是1900PWM值,点击后,舵机会转动到最高位的PWM值角度;可以在此处,直接修改PWM值,从而控制舵机的最大行程。
“mid” 点击后,舵机会转动到PWM1500的中立行程位置!(归中)
“切换” 点击后,舵机会在最大PWM行程、最小PWM行程之间切换。
通过上述指令测试后,我们便可确认舵机的转向。
目前我手上这个抛投模块,是将高位PWM设为打开抛物,将低位置PWM值定义为关闭锁定!
然后便可以进行舵机摇臂安装、铁丝拉杆的弯折、将舵机与结构件固定。
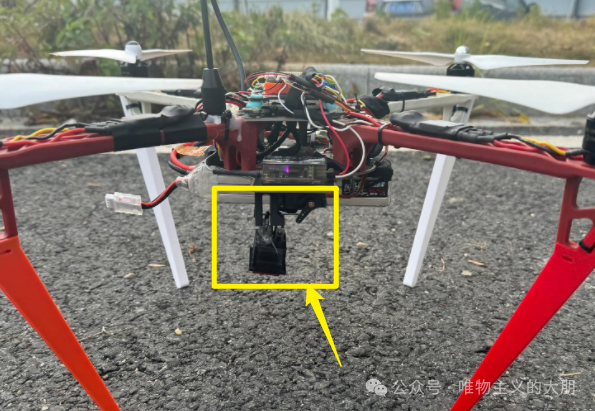
最终安装图如下:
四、抛投开关测试
在完成舵机抛投装置的安装后,再通过MP地面站的舵机指令,测试一下舵机的抛投,分别点击“高”按钮、“低”按钮,确认舵机是否会摆动,如下:
五、规划航线任务
APM固件的航点任务功能非常强大,用户可在地图上选择要飞往的点,然后将航线写入到飞控中,便可实现全自动起降。具体步骤如下:
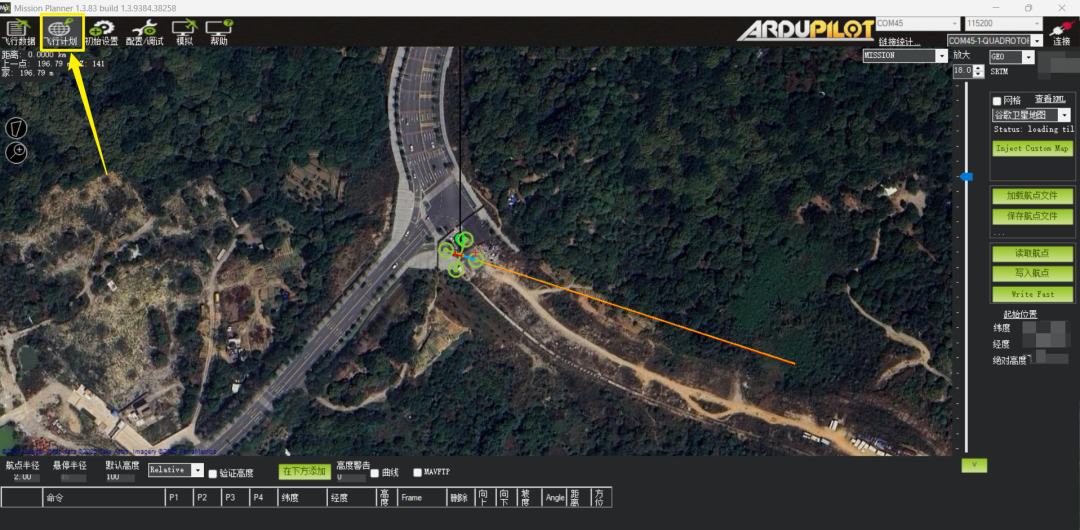
5.1 进入MP地面站的“飞行计划页面”
打开MP地面站,进入“飞行计划页面”,无人机如果定位后,会在卫星地图上显示无人机的位置!
5.2 规划航点:
鼠标在地图某处位置上单击,即可预设1个航点,预设后通过鼠标进行拖拽移动位置。每个航点上都可设置高度、经纬度及航点命令等参数。
5.3 最基础的3个航点任务类型
地图上的单击的每个点默认是“WAYPOINT”命令,它又可以通过下拉框,选择非常多的命令,如下图所示:

在本小节中,会介绍3个最基础最常用的命令分别是:
TAKEOFF(起飞)、
WAYPOINT(航点)、
RETURN_TO_LAUNCH(返航点)。
常用命令1:“TAKEOFF”,起飞指令。
TAKEOFF命令,必须是自动航线中的第一个命令,它的作用是将无人机垂直起飞到指定高度。
那么如何设置起飞指令?
先在地图上点击一个航点,然后将该航点的命令从默认的“WAYPOINT”改为“TAKEOFF”,就完成起飞指令的预设。
一旦将航点选为TAKEOFF命令后,1号点便会消失在地图上。用户可以设置起飞高度(我选择的是20m),高度类型选择“Relative”相对地面的高度。

常用命令2:“WAYPOINT”,航点指令。
在地图上单击一个点后,默认就是WAYPOINT命令。它是带有经纬度的航点。
常用命令3:“RETURN_TO_LAUNCH”,返航指令。
RETURN_TO_LAUNCH命令,需放在整个航线的最后位置,飞完返航。
那么如何设置返航点呢?
跟预设TAKEOFF命令一样,先在地图上点击一个航点,然后将该航点的命令从默认的“WAYPOINT”改为“RETURN_TO_LAUNCH”,就完成返航指令的预设。
同样,一旦将航点选为RTTURN_TO_LAUNCH命令后,最后一个航点会消失在地图上。

5.4 一条最基础航线如何规划?
一条最基础的航线任务由:
1个TAKEOFF命令、
1个WAYPOINT命令、
1个RETURN_TO_LAUNCH命令组成。
大家掌握这3个基础航点指令的设置后,便可在地图上规划任意的航线任务进行飞行!
需要注意的是:
只有WAYPOINT航点命令才会显示在地图上;
TAKEOFF起飞命令、RETURN_TO_LAUNCH返航命令,设置后它们便会消失,不会在地图上显示。
举例说明:
我在地图上点了3个点,将第1个航点设为起飞命令、最后第3个航点设为返航命令后,地图上只会显示1个航点(2号),这是正常的。
5.5 抛投指令的预设
接下来讲解一下最关键的指令:
抛投命令DO_SET_SERVO
它可设置的参数,有2个:
参数1:Ser NO:选择哪个通道输出PWM信号。我这里用的是S5通道!
参数2:PWM值:设置输出的PWM值。我这里是1700的PWM值,打开舵机(大家需根据实际舵机抛投情况来调整!)

六、规最终航线任务
6.1 最终的航线任务
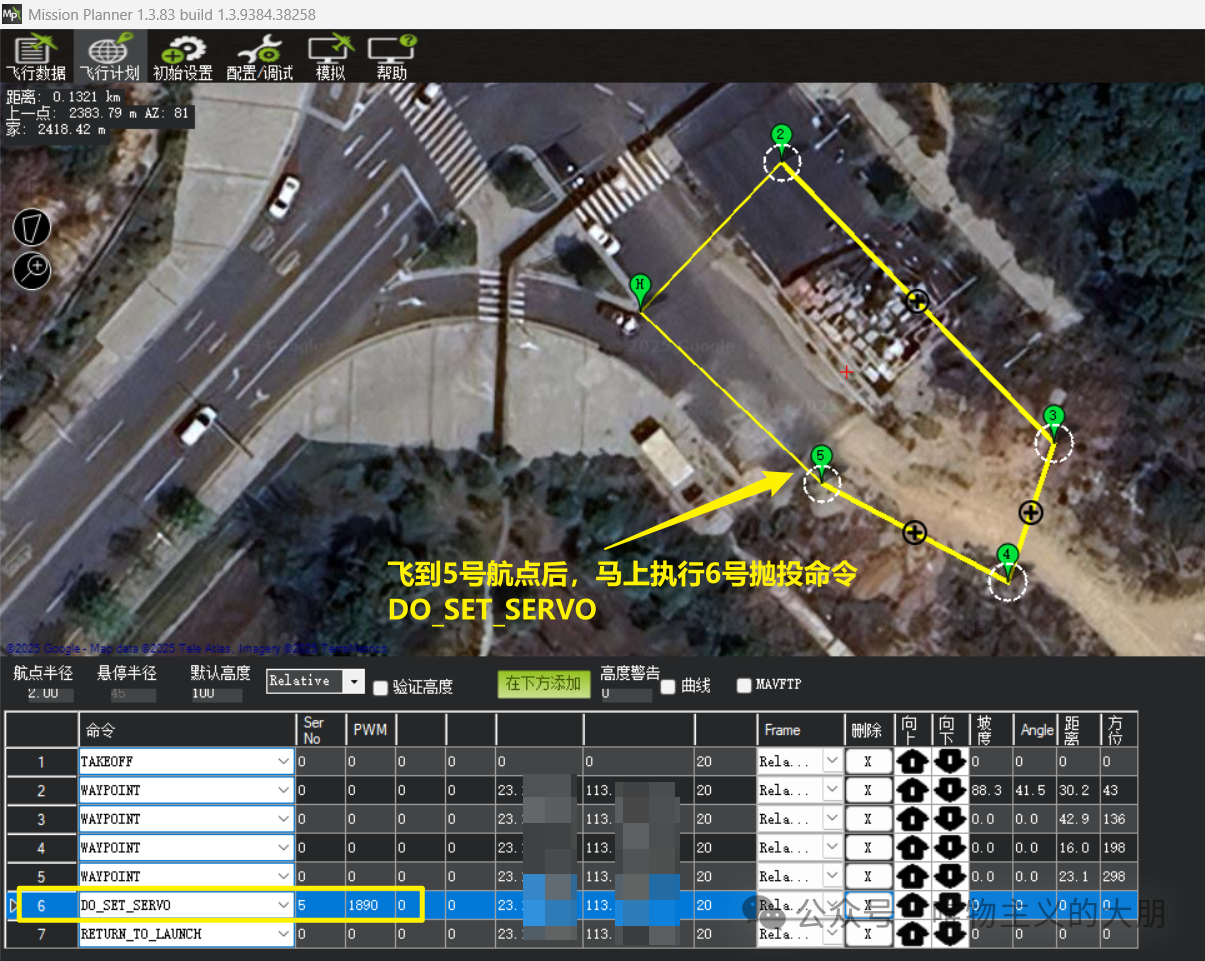
通过前面的章节,讲解了无人机航线规划中的起飞命令、航点命令、返航点命令、舵机抛投命令。于是我规划了一条这样的航线任务:以20m的飞行高度绕了一个小矩形,当飞完5号航点后,马上执行6号抛投命令。也就是说在5号航点进行抛投!如下图所示:
6.2 将航线写入到飞控中
点击右侧工具栏中的“写入航点”,将规划的航点任务,写入到飞控。
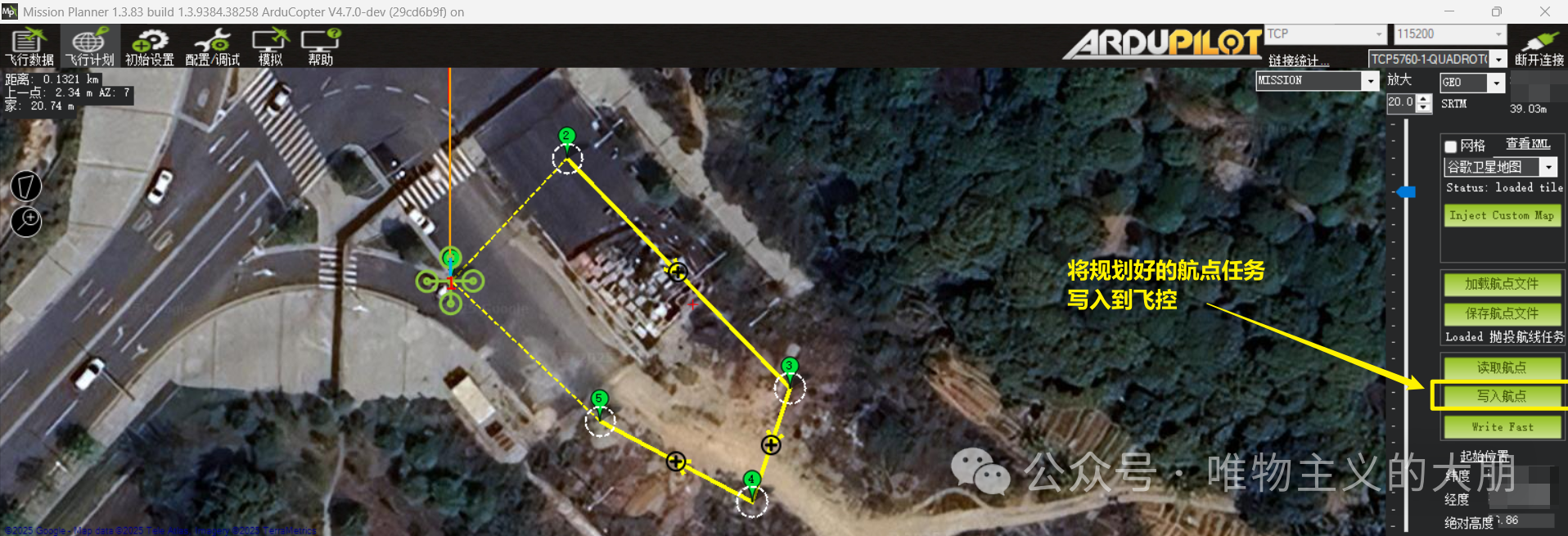
写入过程中会有一个进度条,当进度条消失后,便是写入成功;
如果无线信号不好,写入过程中会有卡顿情况;写入失败,MP地面站会超时提示!
七、安装被抛投的物品
当航线任务规划完毕并上传后,我们就可以将要被抛下的物体挂在飞机上,我这里选用了小开关作为被抛物体。

打开MP地面站,连接飞控进入舵机指令页面。通过鼠标点击"高"、"低"来控制舵机抛投装置的打开、关闭,如下图所示:
打开抛投装置的开关,将被抛的小开关安装完毕后,如下图所示:
八、执行全自动航线
执行全自动航线,实现解锁->无人机自动爬升->飞航点->抛投->返航->下降->自动加锁的全自动流程!
新手首次用自动航线飞行时,建议遥控器还是开着,万一就什么紧急情况可以随时接管!
具体执行全自动航线的步骤,如下:
1)无人机通电,确保飞行模式不在RTL(返航模式)、Auto(自动模式)。
2)选择地面站 “动作指令”,点击“解锁/锁定”按钮,让飞机解锁怠速!

3)在 “执行动作” 按钮前面的下拉框那里选择 “Mission_Start”
4)点击“执行动作”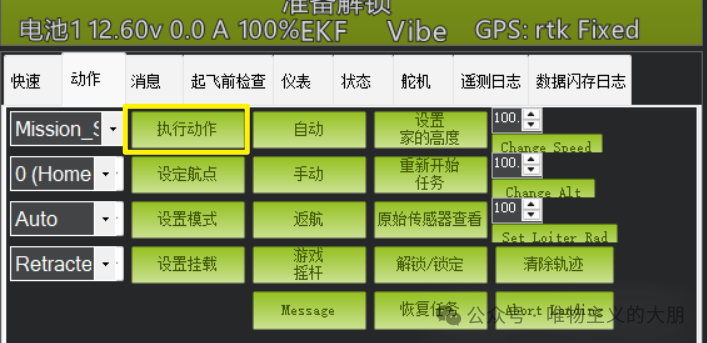
5)飞控在收到执行动作指令后,电机加速旋转使得无人机离地,进入爬升状态,此时飞机已进入全自动状态!
6)最终无人机自动飞航线,抵达预设航点后执行抛投动作,将物体扔下!
