基础设置7-飞行模式挡位切换
文档介绍APM飞行模式设置,可通过修改参数FLTMODE_CH换切换通道,地面站可配置。 1)新手设高、定点、返航模式, 2)老手设自稳、定点、定高模式 3)还提及有14个飞行模式可查看详细介绍。
前言
在APM固中,默认是将遥控器的第5通道设置为飞行模式切换通道,此通道最好选择遥控器上的一个3挡拨动开关,用于遥控器飞行模式切换。
用户如果想将这个飞行开关通道进行更换,可通过修改参数FLTMODE_CH的值(默认=5,代表就是5通道是飞行模式切换通道)。
用户如想改为别的,修改数字即可!比如将FLTMODE_CH = 7 (代表改为7通道)
修改APM固件的飞行模式切换通道,如下图所示:

一、常用的飞行模式设置
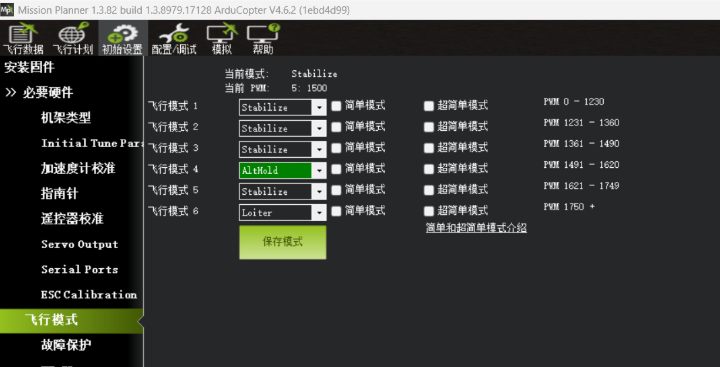
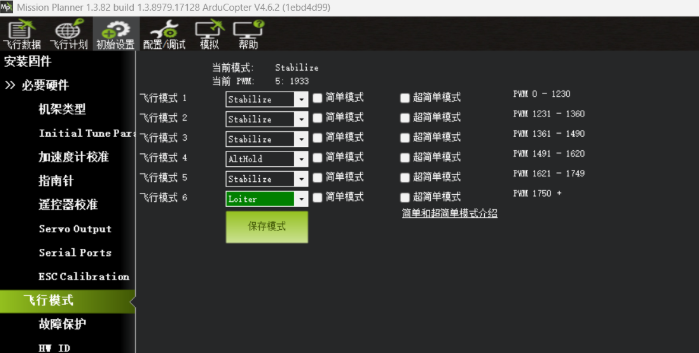
在地面站的初始设置->飞行模式页面中,可对飞行模式进行配置。
切换遥控器的3档开关,正常可以看到每一个档位对应一个模式位置,可通过下拉选择该位置的飞行模式,然后点击保存模式。

1、新手建议设置这3个模式:
1)定高模式(Althold):
油门摇杆在中位时,无人机会通过气压计进行高度保持。
该模式下,无人机的电机输出会比较缓慢,油门需要推到高于中位摇杆时,无人机才会缓慢起飞。(默认参数,当油门最大时,只能以2.5m/s的速度上升)
当无人机要下降的时,油门则需要拉到低于中位(可能更低),无人机才会缓慢降落。

2)定点模式(Loiter):
在搜到卫星后,无人机油门摇杆在中位、俯仰横滚摇杆也位于中位时,无人机将会悬停。(该模式特别适合新手,注意要搜到星)

3)返航模式(RTL):
使用该模式的前提是无人机的卫星棵树必须大于8颗并且处于3D定位模式,无人机解锁瞬间就会记录起飞点的位置。
当新手各种打杆飞高、飞远看不到飞机的姿态时。此应迅速切换到RTL模式,无人机将会自动朝着起飞点的返航并降落。
使用RTL模式,请务必检查返航高度参数 ALT_RTL(默认参数只有1500cm,即15m)。
如果此时我们设置的返航高度只有15m,但我们飞的 高度有30m,那么无人机返航时则会按照当前高度进行返航。
2、有飞行经验的老手设置这3个模式:
1)自稳模式(stabilize)
该模式会控制姿态的稳定(不会像穿越机手动模式那样打杆能把飞机打翻),但飞机不具备定高能力,需要手动频繁调整油门杆来控制高度。
油门输出会非常迅速,轻轻推油就会快速窜起来!!!

2)定高模式(Althold)
油门摇杆在中位时,无人机会通过气压计进行高度保持。
但是油门速度的响应速度非常缓慢,需要下降时,要下拉比较大的油门杆幅度。
3)定点模式(Loiter)
在搜到卫星后,无人机油门摇杆在中位、俯仰横滚摇杆也位于中位时,无人机将会悬停。(该模式特别适合新手,注意要搜到星质量好才能精准定位,否则可能会漂移)
常见的几种飞行模式如何调参?
上述定点模式(Loiter)、定高模式(Althold)、自稳模式(stabilize)、返航模式(RTL)都有默认参数配置。这个默认手感能飞,但不好飞。
APM固件提供了大量的参数,可以对各种飞行模式进行参数调整,让飞机更好飞,更跟手,详情请查阅:《飞行模式介绍及调参》
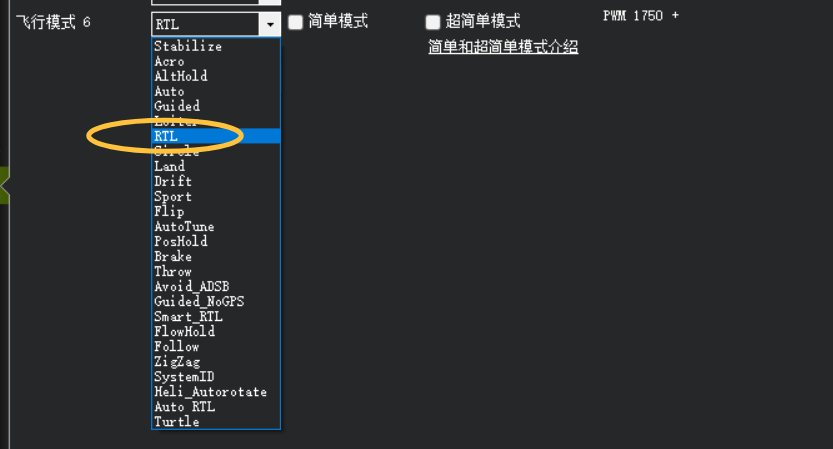
其他飞行模式介绍
点击下拉三角形,可看到有以下飞行模式可供选择,具体每个飞行模式有什么特点以及使用注意事项请查看:
《飞行模式介绍》章节。

飞行模式 | 注释 | 高度控制 | 姿态控制 | 是否需要 GPS定位 |
|---|---|---|---|---|
Stabilize (常用模式) | 增稳模式,自动保持俯仰与横滚的姿态水平。 | - | + | ❌ |
AltHold (常用模式) | 定高模式,在增稳模式的基础上增加高度保持。 | S | + | ❌ |
Auto (常用模式) | 自动模式,预设航点经纬度坐标,执行自动航线。 (需要依赖卫星定位) | A | A | ✔ |
Loiter (常用模式) | GPS留待模式,保持高度和位置,基于GPS位置进行移动。 (需要依赖卫星定位) | S | S | ✔ |
RTL (常用模式) | 返航模式,固定翼会返航到起飞点上空盘旋,对于多旋翼而言,还包含自动降落并上锁。 (需要依赖卫星定位) | A | A | ✔ |
Land( 常用模式) | 降落模式,在返航到头顶时会执行降落模式,另外APM旋翼固件在卫星定位模式飞行过程中突然丢失,默认也会切换到降落模式。 | A | S | ❌ |
Guided_NoGPS | 引导模式(不需要GPS定位),普通用户慎用,此模式是为配套AI算力板卡的SLAM定位开发者准备的。 | A | A | ❌ |
Guided | 引导模式(需要GPS定位),通过地面站上的地图选点后,无人机会自主朝你选择的点飞去。 | A | A | ✔ |
Drift | 漂移模式,能够让多旋翼飞出一种协调转弯的效果。如果操作熟练,转弯时一起打偏航与横滚摇杆即可飞出此效果。 (个人感觉用处不大) | - | + | ✔ |
Sport | 运动模式, 在该模式打杆松杆后,无人机姿态会保持一个角度(不会回中),但是有角度参数限制,不至于将无人机打翻。 (个人感觉也不是很实用) | S | S | ❌ |
Flip | 翻跟头模式,切到此模式无人机会在空中进行一次翻转。 (没啥用并且非常危险,不推荐用) | A | A | ❌ |
AutoTune | 自动调参模式,在该模式下可以让无人机自动进行PID的调试。 | S | A | ✔ |
PosHold | GPS定点模式,该模式与Loiter模式类似,但其是通过摇杆输入控制无人机的姿态角度,因此其动作响应更灵敏。 | S | + | ✔ |
Brake | 刹车锁定模式,紧急刹车模式,一旦启用,该模式会忽略遥控器的操控信号(如横滚、俯仰、油门),完全依赖飞控自主完成制动 (个人认为,慎用) | S | A | ✔ |
Throw | 抛飞模式,将无人机扔出后会自动解锁并起飞。 (没啥用并且非常危险,不推荐用) | A | A | ✔ |
Avoid_ADSB | 基于ADS-B的有人驾驶飞机避让。 不应设置为遥控器可选的飞行模式。 | \ | \ | \ |
Circle | 绕圈模式 | A | A | ✔ |
Smart_RTL | 智能返航模式 | A | A | ✔ |
FlowHold | 光流室内定位模式,接入光流传感器可实现室内定位。 | S | A | ❌ |
Follow | 跟随模式,无人机将跟着另外一台头机飞机,头机的位置必须通过遥测系统发送给跟随的后机。 | S | A | ✔ |
ZigZag | AB点农业植保模式 | A | A | ✔ |
SystemID | 系统标识模式,科研学者 分析使用,用于数据采集、建模诊断。 (一般人用不到,无需关注) | - | + | ❌ |
Acro | 纯手动模式,可打杆空中翻跟头。 穿越机爱好者可以尝试使用。 | - | - | ❌ |
符号含义:- + S A
