4.2 任务命令解析(待更新)
一、前言
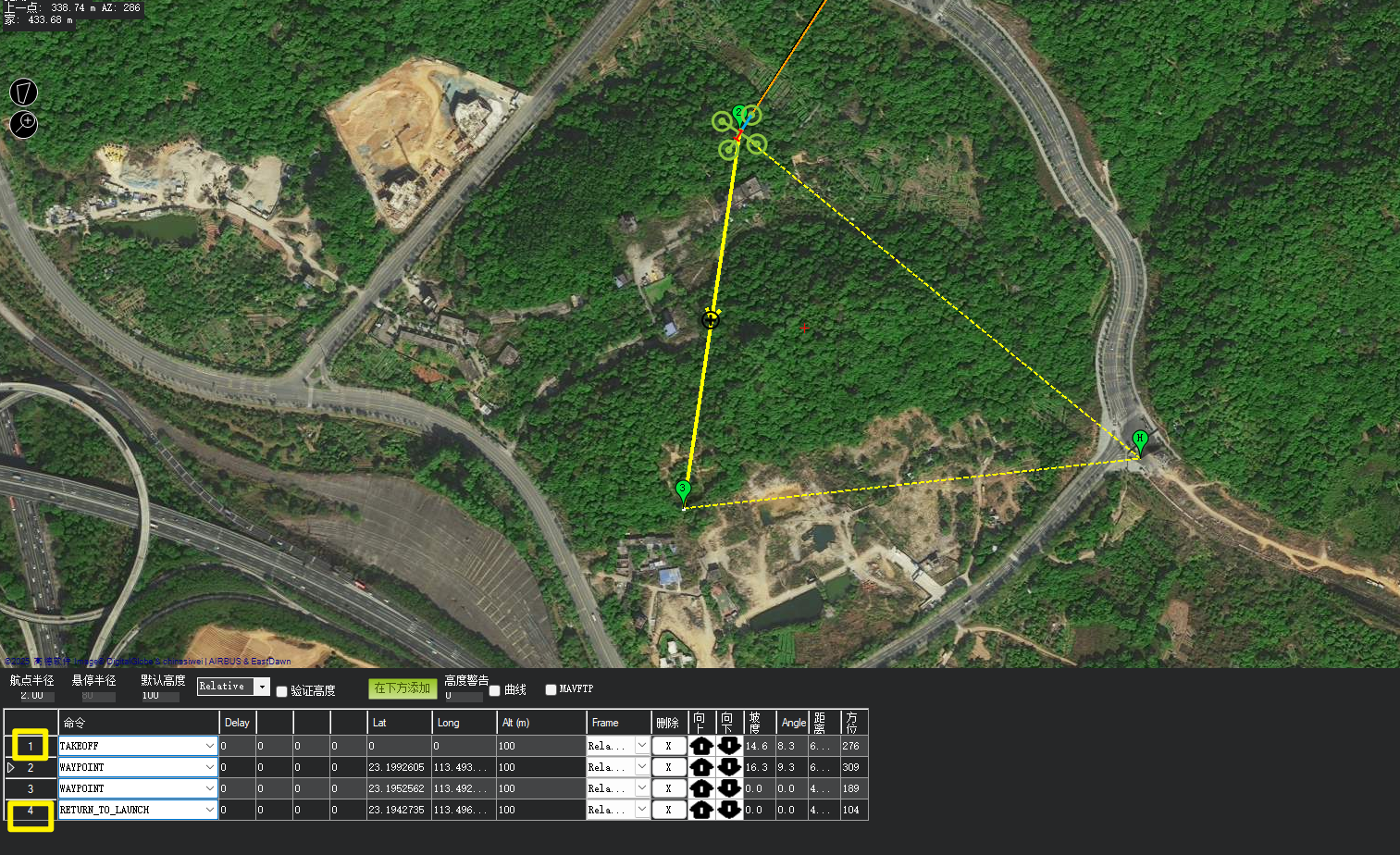
在航线规划页面中,鼠标单击地图的某处位置即可进行航点选择,默认该点的命令是WAYPOINT(航点)。
用户可以通过下拉选框选择其他,如下图所示:

二、超高频指令
起飞命令:TAKEOFF
该起飞命令适用于多旋翼和固定翼,垂起需要使用VTOL_TAKEOFF
起飞命令,只需要设置起飞高度即可!

航点命令:WAYPOINT
想要飞到地图上的哪个点,就选用这个指令。(默认在地图上选1点,点击以后就是航点)

返航命令:RETURN_TO_LAUNCH
在所有航点执行完毕后,记得 在最后加上一个返航指令,这个指令不用设置任何

需要注意的是:当用户勾选了TAKEOFF和RETURN_TO_LAUNCH指令后,起飞点与返航点就会在地图上消失,这个是正常的。
三、LAND指令(慎用)
在某个航点处使用LAND指令,无人机就会在这个点上直接执行降落。此指令要慎用,一般不用。
四、跳转指令(测试过程中常用)
四、云台相机指令
云台三轴角度控制指令:DO_MOUNT_CONTROL
拍照指令:IMAGE_START_CAPTURE
IMAGE_STOP_CAPTURE
SET_CAMERA_ZOOM
SET_CAMERA_FOCUS
SET_CAMERA_SOURCE
开始录像指令:VIDEO_START_CAPTURE
结束录像指令:VIDEO_STOP_CAPTURE
五、舵机与继电器动作指令
WAYPOINT
TAKEOFF
RETURN_TO_LAUNCH
ATTITUDE_TIME
DELAY
GUIDED_ENABLE
LAND
LOITER_TIME
LOITER_TURNS
LOITER_UNLIM
PAYLOAD_PLACE
SCRIPT_TIME
DO_SEND_SCRIPT_MESSAGE
SPLINE_WAYPOINT
IMAGE_START_CAPTURE
IMAGE_STOP_CAPTURE
SET_CAMERA_ZOOM
SET_CAMERA_FOCUS
SET_CAMERA_SOURCE
VIDEO_START_CAPTURE
VIDEO_STOP_CAPTURE
DO_AUX_FUNCTION
DO_GIMBAL_CONTROL
DO_DIGICAM_CONFIGURE
DO_DIGICAM_CONTROL
DO_ENGINE_CONTROL
DO_GIMBAL_MANAGER_PITCHYAW
DO_GRIPPER DO_GUIDED_LIMITS
DO_JUMP
JUMP_TAG
DO_JUMP_TAG
DO_LAND_START
DO_PARACHUTE
DO_REPEAT_RELAY
DO_REPEAT_SERVO
DO_SET_CAM_TRIGG_DIST
DO_SET_HOME
DO_SET_RELAY
DO_SET_RESUME_REPEAT_DIST
DO_SET_ROI
DO_SET_ROI_LOCATION
DO_SET_ROI_NONE
DO_SET_SERVO
DO_SPRAYER
DO_WINCH
CONDITION_DELAY
CONDITION_DISTANCE
CONDITION_YAW
UNKNOWN