4.3 通过指令干预自动任务
一、退出自动模式的方法
自动航线如果在执行过程中,无人机的飞行模式会处于AUTO(自动模式)中,如果要退出AUTO(自动模式),可通过以下办法:
1)通过遥控器切换飞行模式,将飞行模式从AUTO自动模式切换到其他任意模式,无人机即刻退出AUTO模式。
2)通过人为干预,切换到返航模式!
3)无人机因低电量保护、失控保护等原因,此时无人机也会退出自动模式,切换到返航模式。 (前提是用户已经配置了低电量保护和失控保护,具体如何配置可以参阅文档《失控保护与低电量配置》)
二、正常的全自动流程
1)无人机解锁
2)执行自动模式
3)无人机爬升到指定高度
4)无人机执行自动航线
5)无人机返航降落
6)无人机着陆后自动上锁。(着地加锁后,无人机的飞行模式会停留在Auto模式,用户需要自己切换模式)
三、失控保护与自动航线
重点:
设置失控保护参数,最好设定无人机在自动航线中,失控后仍然继续执行航线!
在执行自动航线任务中,由于很有可能飞行过程中遥控器信号、数传电台信号会衰减甚至丢失。
此时不要随意的去切换遥控器的飞行模式开关,等待航线飞行完成并且自动返航,反而是更加安全的举措!
多旋翼固件中,自动模式下失控保护的策略
APM固件默认是遥控器信号丢失/数传电台信号丢失,就会自动返航;但是一失控就立即返航会导致,我们的自动航线没有办法飞完!
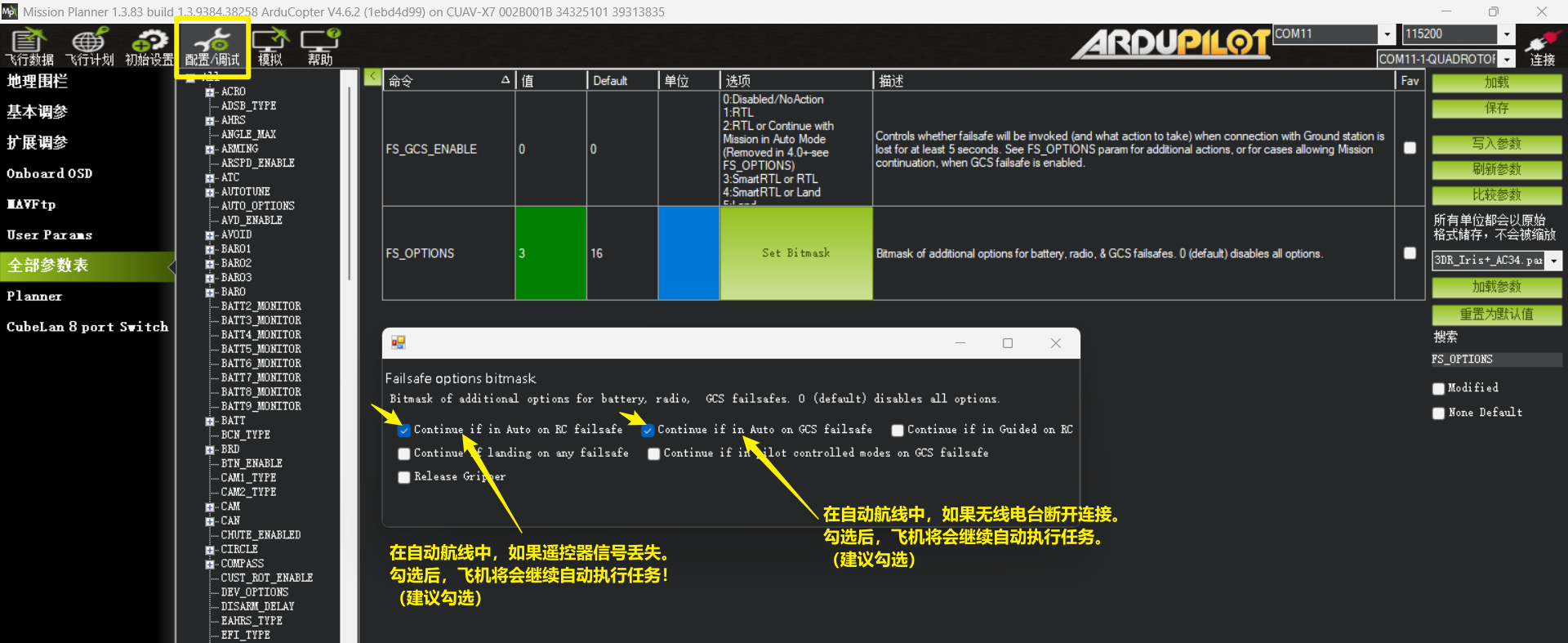
如果在执行任务过程中,希望信号丢失以后,无人机不返航,而是继续执行动作,那么我们要将参数FS_OPTIONS=3。
下图做了说明:
四、通过MP地面站指令,干预自动航线
正常情况下,我们规划好1条航线,无人机在飞行过程中,是不需要对航线进行干预的,只需要安静等待自动航线执行完毕自动降落即可!
但是由于一些特殊情况,我们需要对飞行中的无人机进行干预,因此对一些常用的干扰指令进行介绍:
4.1 在自动任务中,暂停任务!
如果在自动任务进行中,需要暂停任务,只需要无人机的飞行模式将会从"Auto模式" 切换到“Loiter模式”,无人机就会暂停任务。
切换的方式有3种:
1)、可以通过遥控器的飞行档位开关,切换至“Loiter模式”
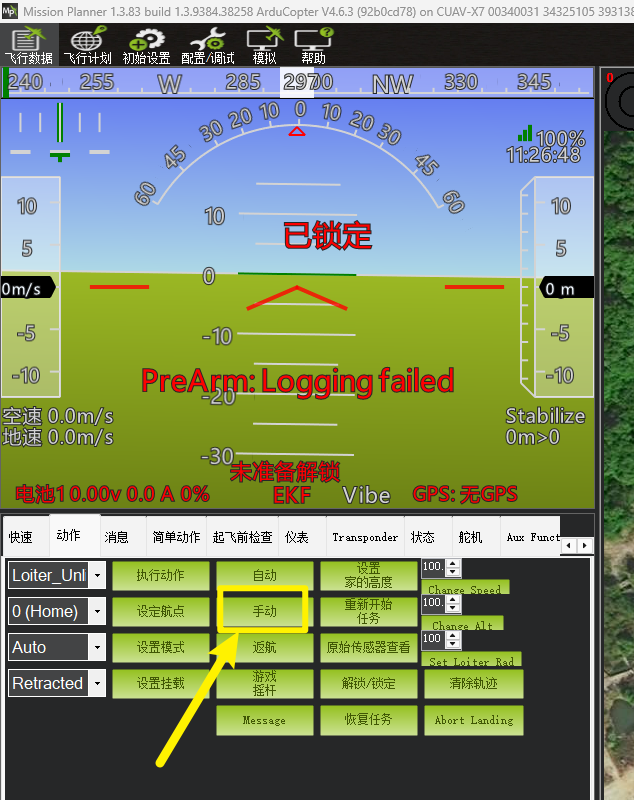
2)、可以通过地面站的"动作"->“手动”,切换至“Loiter模式”
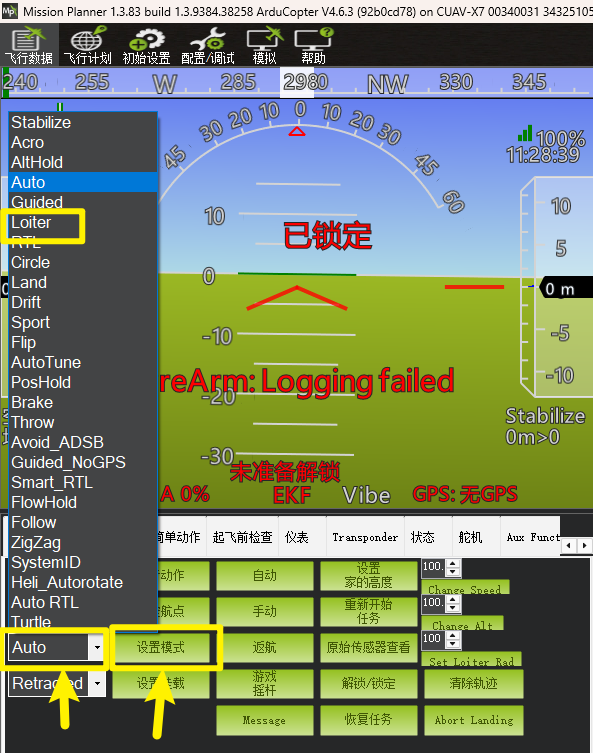
3)、可以通过地面站的"设置模式下拉窗口"->“设置模式”,切换至“Loiter模式”
4.2 恢复自动任务
当我们想要恢复自动任务时,只需要将飞行模式重新切回“Auto模式”即可!
无人机会有根据MIS_RESTART参数的设置,有以下两种情况:
任务恢复参数
MIS_RESTART默认=0,这样恢复任务后,会继续接着之前的任务执行。假设已经飞过了3号航点,然后我们点击暂停,再重新回到Auto模式,此时无人机会朝着4号航点飞过去,相当于继续任务!任务恢复参数
MIS_RESTART默认=1,这样恢复任务后,无人机会重新飞回第一个航点进行。假设已经飞过了3号航点,然后我们点击暂停,再重新回到Auto模式,此时无人机会重新朝着第一个1号航点飞过去,相当于重置了任务!
4.3 在自动任务中,跳转航点
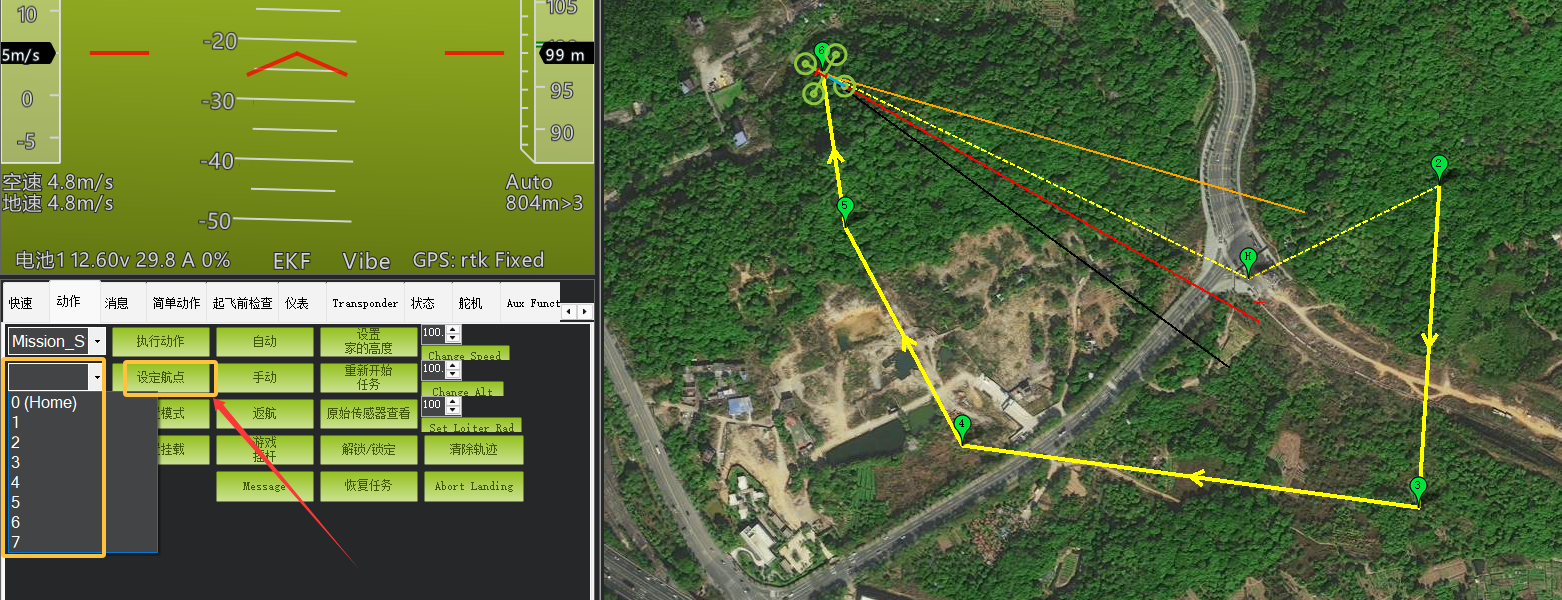
在自动任务中,正常是按照顺序航点进行飞行的,起飞后朝着第一个航点飞去,然后飞第二个航点。
用户可以跳转航点功能,朝着航线任务的任意一个航点进行切换。
4.4 在自动任务中,主动执行返航
1)用户可通过飞行档位开关上设置一个返航档位,切换到“RTL模式”进行实现返航。(前提是无人机起飞前记录GPS位置,并且GPS全程信号良好)
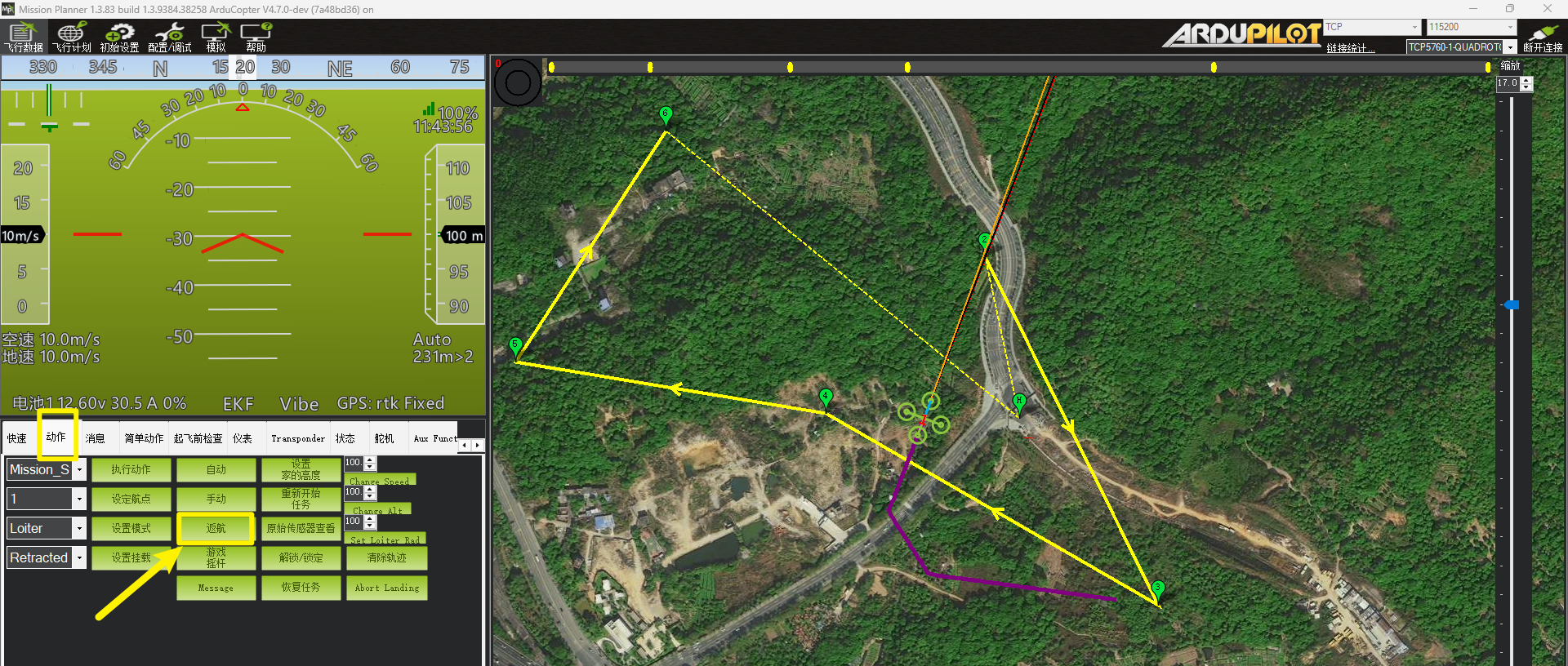
2)用户也可以通过地面站“动作”->“返航按钮”,点击一下即可返航!
4.5 通过遥控器接管无人机
如果在自动模式下想重新接管无人机,只需将无人机的飞行模式从Auto模式切换到其他模式,即可接管。
如果飞机已经超出目视范围,新手尽量不要轻易使用遥控器进行接管,除非你能够确认飞行环境十分安全!
五、修改航线并重新上传!
如果飞行中需要对航线进行调整,那么可以修改航线后,重新再写入一次航线,即可调整航线。
为什么确保航线写入的 成功率,最好要在电台信号良好的情况下进行航线更新,如以下视频所示: