基础设置9.1-常用的飞行模式介绍
前言 在AP多旋翼固件里面,提供了以下多种飞行模式! 符号含义:- + S A 飞行模式 注释 高度控制 姿态控制 是否需要GPS定位 Stabilize(常用模式) 增稳模式,自动保持俯仰与横滚的姿态水平。 - + ❌ AltHold(常...
概述
多旋翼(直升机)4.6版固件,一共有24种内置的飞行模式,其中常用的飞行模式有6种,如下:

注:飞行模式可以通过遥控器控制、任务命令也可以通过GCS地面站或机载电脑来进行控制;遥控器和地面站都可以同时控制飞行模式,通常以最后一个命令为准。
常见飞行模式1-自稳模式(Stabilize)
详情可翻阅文档《自稳模式-相关参数调试》
常见飞行模式2-定高模式(AltHold)
详情可翻阅文档《定高模式-相关参数调试》
常见飞行模式3-定点模式(Loiter)
详情可翻阅文档《定点模式-相关参数调试》
常见飞行模式4-自动调参模式(AutoTune)
详情可翻阅文档《自动调参模式-相关参数调试》
常见飞行模式5-返航模式(RTL)
无人机在RTL模式的时候,将会通过GPS信号引导飞行器飞回HOME点上方(起飞点)!
如果是多旋翼则还会出发降落加锁,如果是固定翼则是返航到头顶进行盘旋,需要人为通过遥控器接管并降落。
- 当飞行器当前的高度,高于返航最低高度参数
RTL_ALT时(默认=1500cm),无人机将保持原有高度进行返航; - 反之,当飞行器当前的高度,高于返航最低高度参数
RTL_ALT时(默认=1500cm),无人机将会先爬升到RTL_ALT所设置的参数进行返航,然后再进行返航。 - 注意:返航模式是走两点直线回来,因此要合理设置最低返航高度,避免返航途中因撞击坠机!
- 对于旋翼飞行器而言,RTL将返回至GPS定位后解锁的地方。
返航模式中,可配置的参数如下:
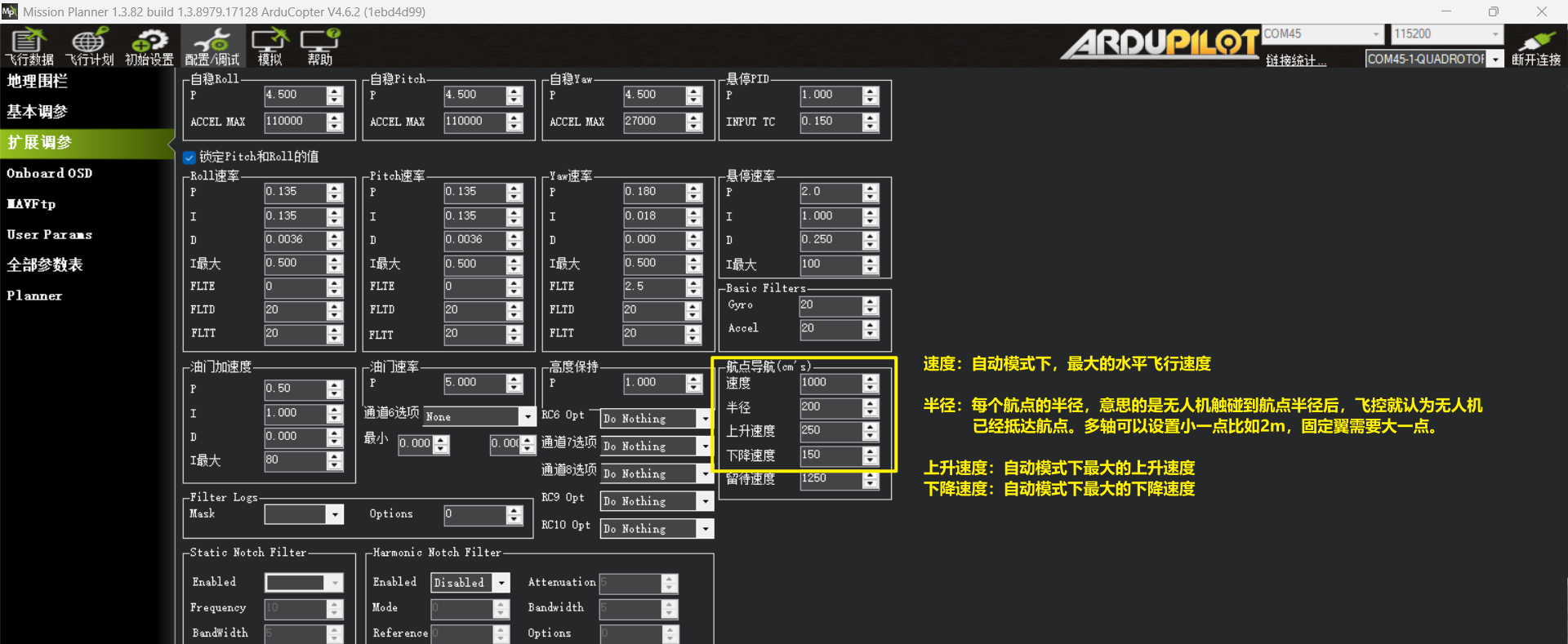
RTL_ALT,返航的最低高度。默认是1500cm(15m),设0则代表以当前高度进行返航。RTL_ALT_FINAL,设置返航阶段的最后高度。 假如设置成500cm,则代表下降到距离地面5m高度时,触发LAND模式。这么设置的作用是,可以让最后的降落分为2个阶段,在2个阶段都可以分别设置不同的下降速度。WPNAV_SPEED_DN,第一阶段的降落速度,默认是150cm/s。LAND_SPEED,设置最后降落时的速度。默认是50cm/s。RTL_LOIT_TIME,返航到头顶时的悬停时间,默认是悬停5S后,再执行降落。RTL_SPEED,返航时的水平飞行速度。如果设置为0,那么会使用WPNAV_SPEED的参数。WP_YAW_BEHAVIOR,设置任务和RTL中的偏航角度。默认=2。
WP_YAW_BEHAVIOR =0,从不转航向,在自动飞行过程中,始终保持起飞时的机头朝向;
WP_YAW_BEHAVIOR=1,机头一直朝着下一个航点,这样在返航到头顶时,无人机机头是朝着home点方向,这可能会让操作人员"对头降落"!
WP_YAW_BEHAVIOR=2,机头一直朝着下一个航点(返航除外),这样会在返航到头顶时,旋转到与起飞时的朝向一致时,再执行降落,可以有效避免飞手“对头降落”!
常见飞行模式6-降落模式(Land)
Land降落模式比较容易理解,通常有2类场景会触发Land降落模式:
1)在Auto模式的最后阶段,会触发Land模式。
2)无人机当前的飞行模式,是以GPS定位的模式飞行(Auto、Loiter、PosHold等),一旦GPS卫星丢星时,飞控默认会触发无人机执行Land模式,用户可以通过参数FS_EKF_ACTION进行设置。
默认FS_EKF_ACTION=1(GPS丢星后触发LAND模式),用户可根据实际情况将FS_EKF_ACTION=2(GPS丢星后切换为定高模式)


两段下降速度修改:
下降分为2段,第一段下降速度较快默认是150cm/s,如下图所示:
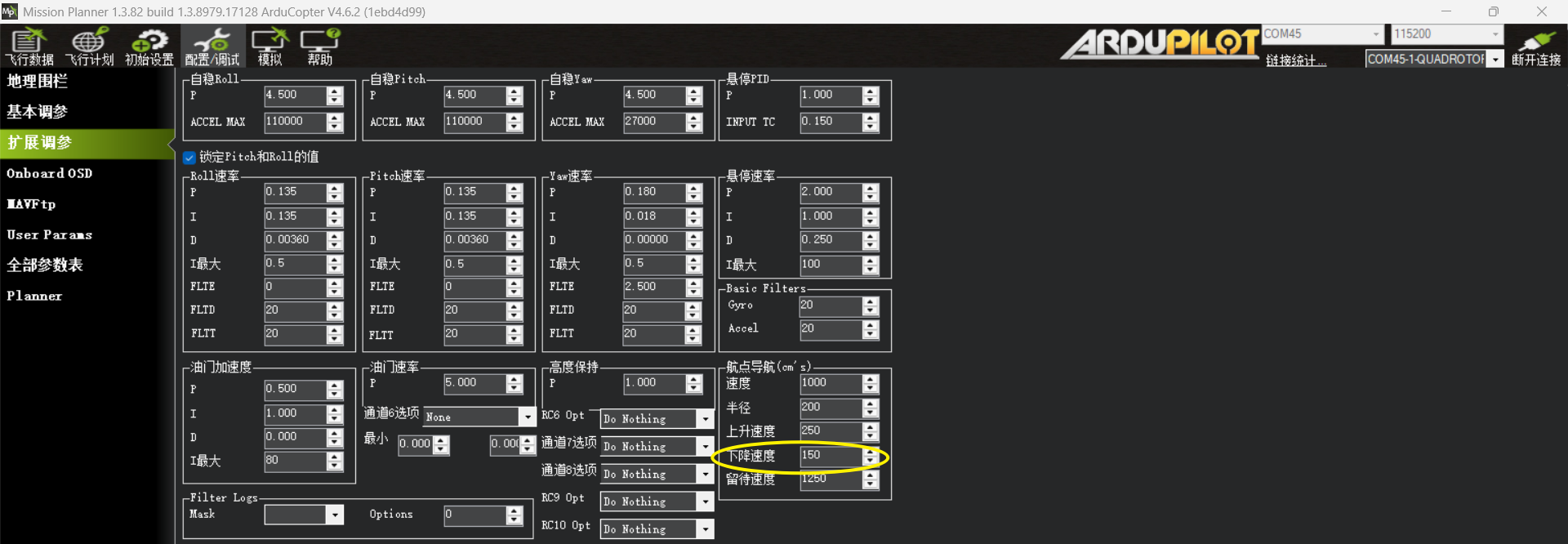
第二段下降速度较缓慢,默认是50cm/s,通过全部参数LAND_SPEED进行修改,默认第二段的下降速度是50cm/s

具体是从多少m的高度开始切换降落速度,通过LAND_ALT_LOW参数进行设置,默认是10m,最高可以设置为100m!

常见飞行模式7-自动模式(Auto)
概述:
- 用户可通过地面站预航点信息,执行Auto模式后,无人机将自动执行航点飞行,待航点执行完毕后,无人机将会执行自动降落并于着陆后自动上锁。
- 当无人机处于Auto模式时,用户无需使用遥控器进行操作!但是可以通过飞行模式切换开关,任意拨到非Auto模式的挡位后,即可退出Auto模式!
Auto模式常用的相关参数:
Auto模式的任务重新开始参数
MIS_RESTART =0(默认),假如用户在自动模式下因为某些特殊原因手动接管退出,然后再切回自动模式后,会继续执行任务。(假如之前飞完了3号航点,会朝着4号航点飞去)
如果用户将MIS_RESTART =1,用户在自动模式下因为某些特殊原因手动接管退出,然后再切回自动模式后,会从头开始执行任务。(即无人机无论在哪里,都会飞回从第一个航点开始!)

如何触发自动模式?
无人机的上已设置好航线任务,并已上传。
方法1:将Auto模式设置在遥控器的飞行模式切换开关上,使用遥控器解锁并将无人机升空后,将飞行模式切换到Auto模式挡位,无人机就会进入Auto模式,朝预设航点飞去!
方法2:通过MP地面站触发自动模式,可以查阅视频教程《使用MP地面站模拟器功能,演示航线规划、全自主飞行!》
1)通过missinonplanner规划航线任务,并在第一个航点中设置 "TAKEOFF命令",并设置好起飞高度!
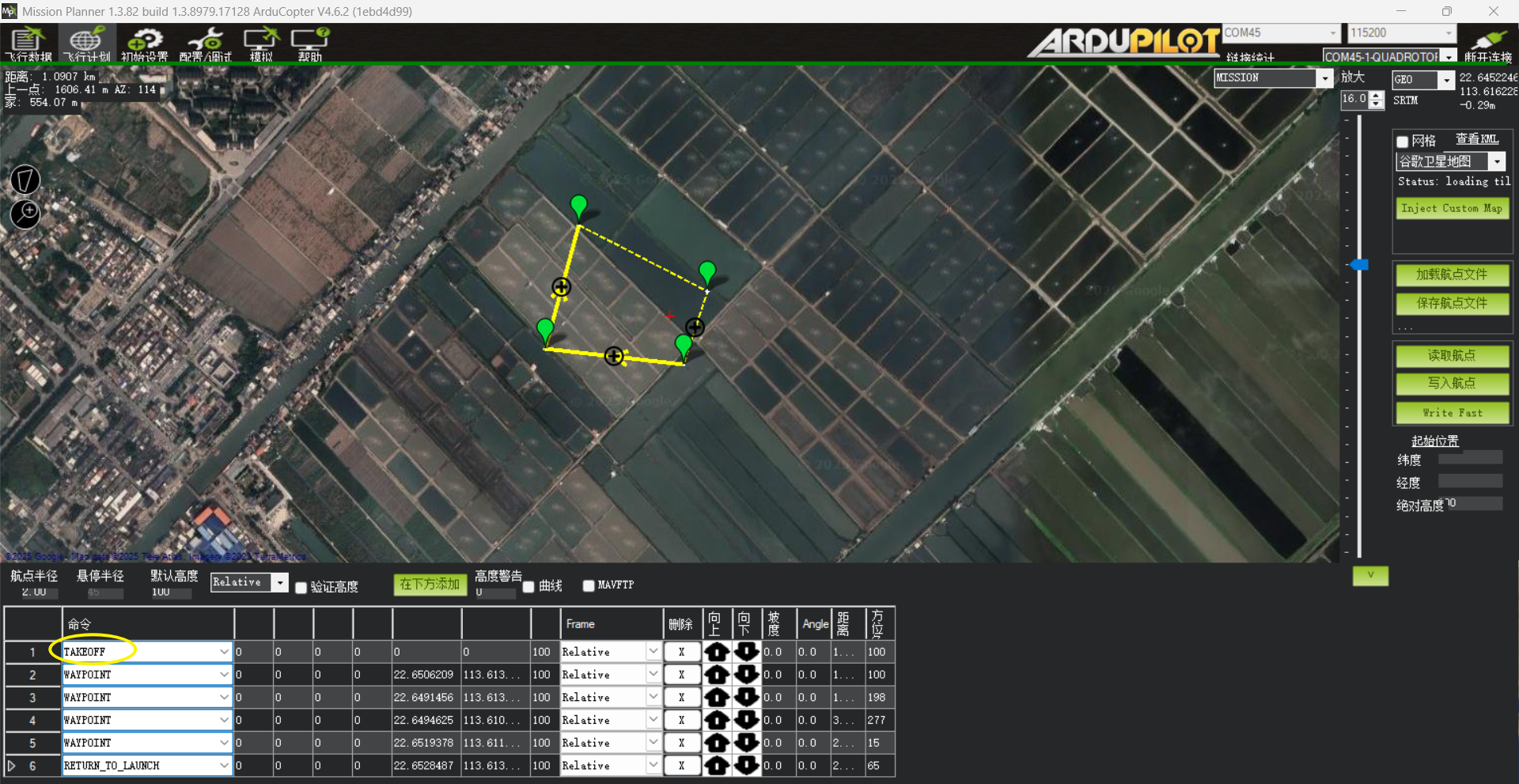
2)无人机首先在地面执行解锁,无人机在解锁怠速过程中,再通过地面站的动作指令,执行“Mission_Start命令”指令后,无人机将会执行自动起飞,起飞到TAKEOFF命令 指定的高度后,将会朝着航点飞去!
